
基于空情数据的雷达发现概率评估方法及设备.pdf

努力****梓颖

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于空情数据的雷达发现概率评估方法及设备.pdf
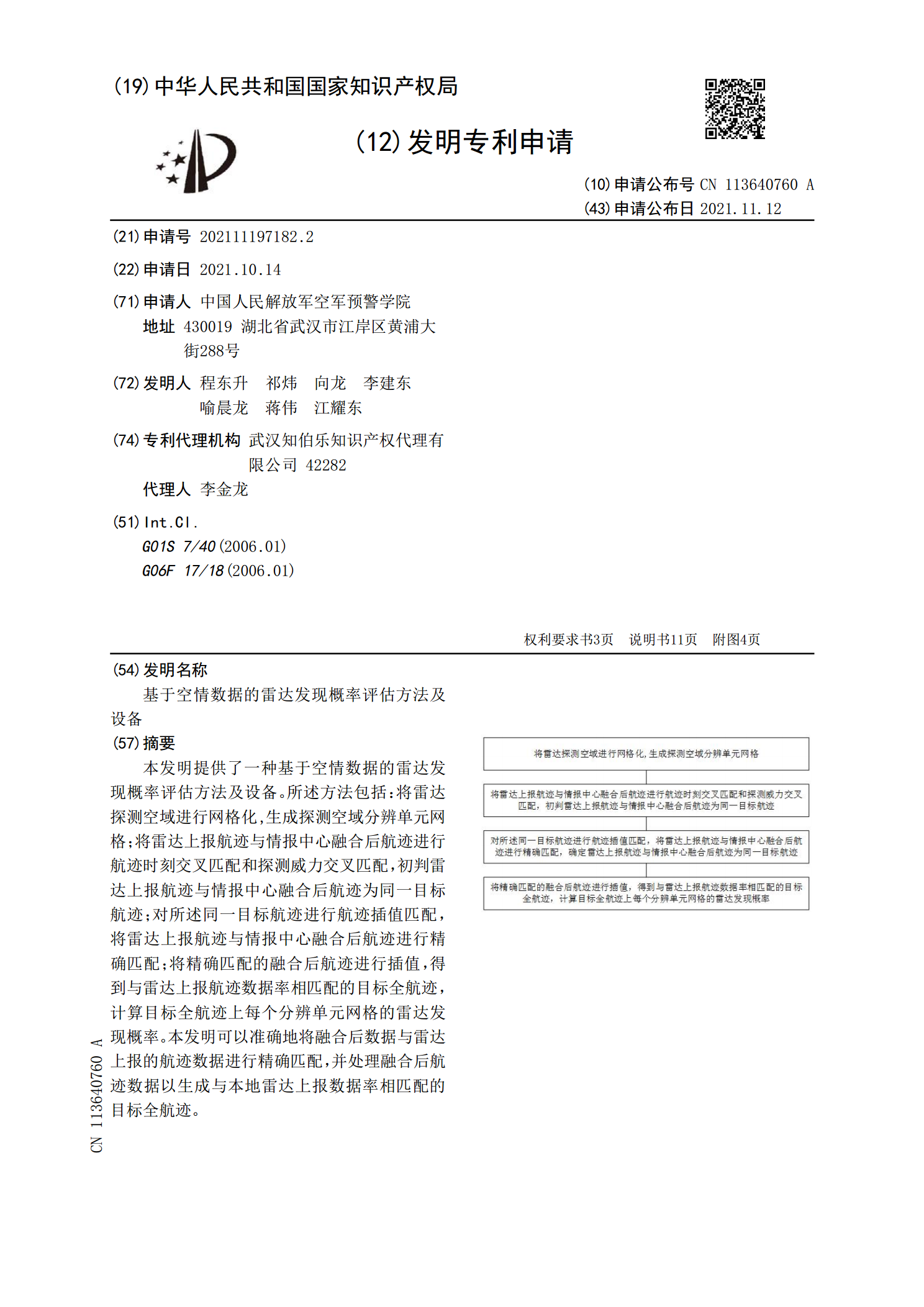
本发明提供了一种基于空情数据的雷达发现概率评估方法及设备。所述方法包括:将雷达探测空域进行网格化,生成探测空域分辨单元网格;将雷达上报航迹与情报中心融合后航迹进行航迹时刻交叉匹配和探测威力交叉匹配,初判雷达上报航迹与情报中心融合后航迹为同一目标航迹;对所述同一目标航迹进行航迹插值匹配,将雷达上报航迹与情报中心融合后航迹进行精确匹配;将精确匹配的融合后航迹进行插值,得到与雷达上报航迹数据率相匹配的目标全航迹,计算目标全航迹上每个分辨单元网格的雷达发现概率。本发明可以准确地将融合后数据与雷达上报的航迹数据进行
一种基于雷达情报仿真的空情融合性能评估系统及方法.pdf
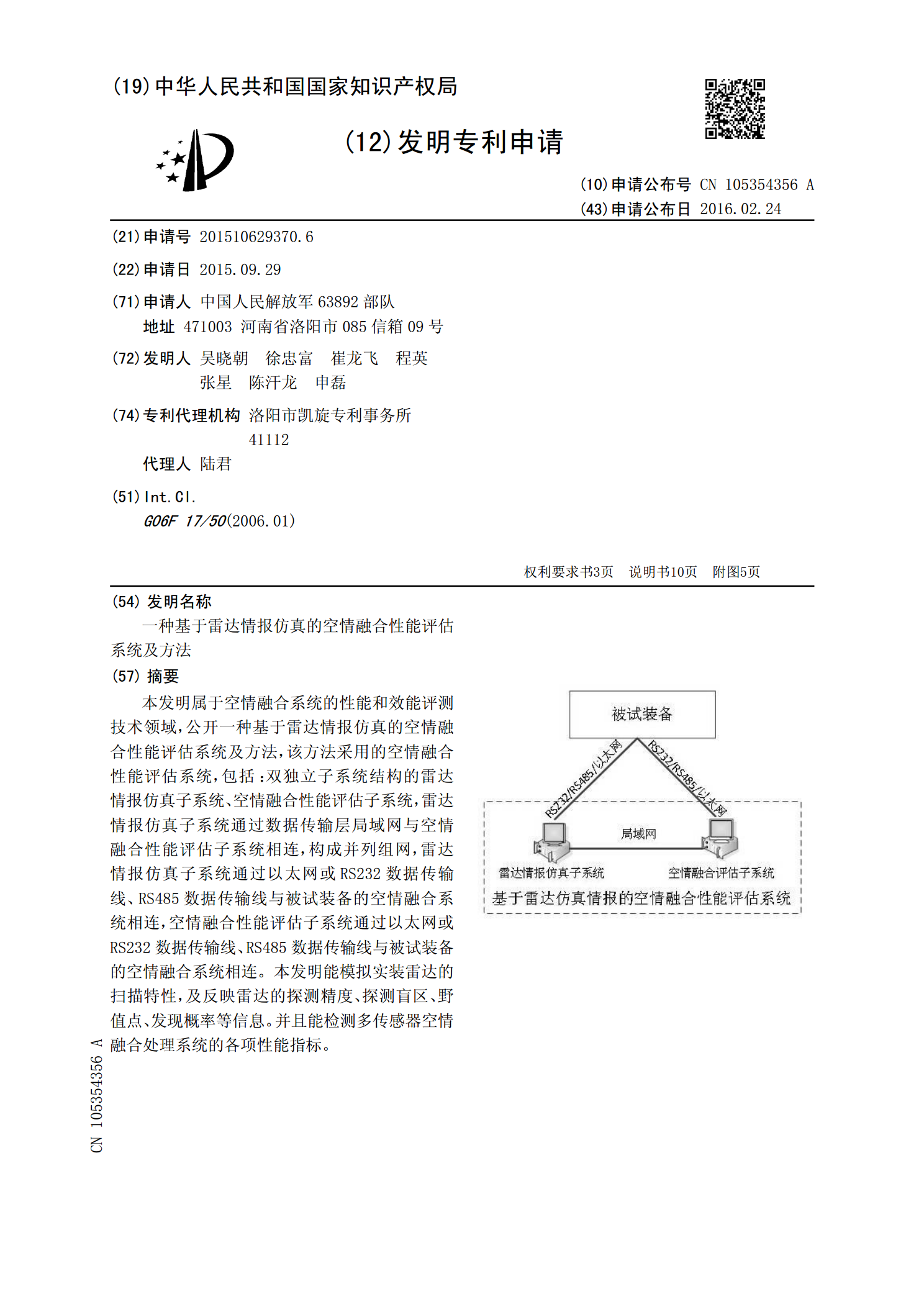
本发明属于空情融合系统的性能和效能评测技术领域,公开一种基于雷达情报仿真的空情融合性能评估系统及方法,该方法采用的空情融合性能评估系统,包括:双独立子系统结构的雷达情报仿真子系统、空情融合性能评估子系统,雷达情报仿真子系统通过数据传输层局域网与空情融合性能评估子系统相连,构成并列组网,雷达情报仿真子系统通过以太网或RS232数据传输线、RS485数据传输线与被试装备的空情融合系统相连,空情融合性能评估子系统通过以太网或RS232数据传输线、RS485数据传输线与被试装备的空情融合系统相连。本发明能模拟实装
基于雷达情报的空情目标特征提取方法及装置.pdf
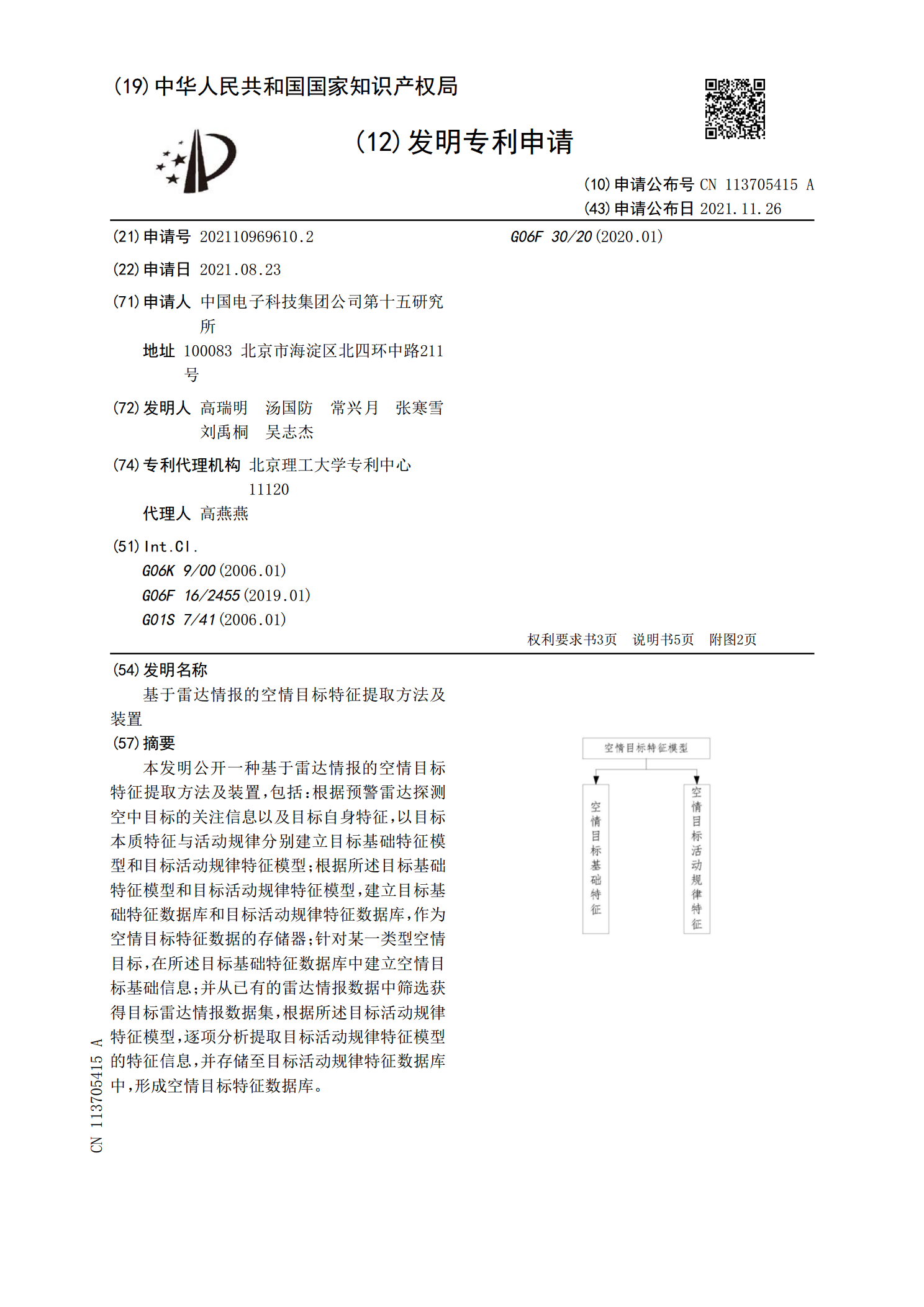
本发明公开一种基于雷达情报的空情目标特征提取方法及装置,包括:根据预警雷达探测空中目标的关注信息以及目标自身特征,以目标本质特征与活动规律分别建立目标基础特征模型和目标活动规律特征模型;根据所述目标基础特征模型和目标活动规律特征模型,建立目标基础特征数据库和目标活动规律特征数据库,作为空情目标特征数据的存储器;针对某一类型空情目标,在所述目标基础特征数据库中建立空情目标基础信息;并从已有的雷达情报数据中筛选获得目标雷达情报数据集,根据所述目标活动规律特征模型,逐项分析提取目标活动规律特征模型的特征信息,并
基于雷达情报的空情目标识别方法及装置.pdf
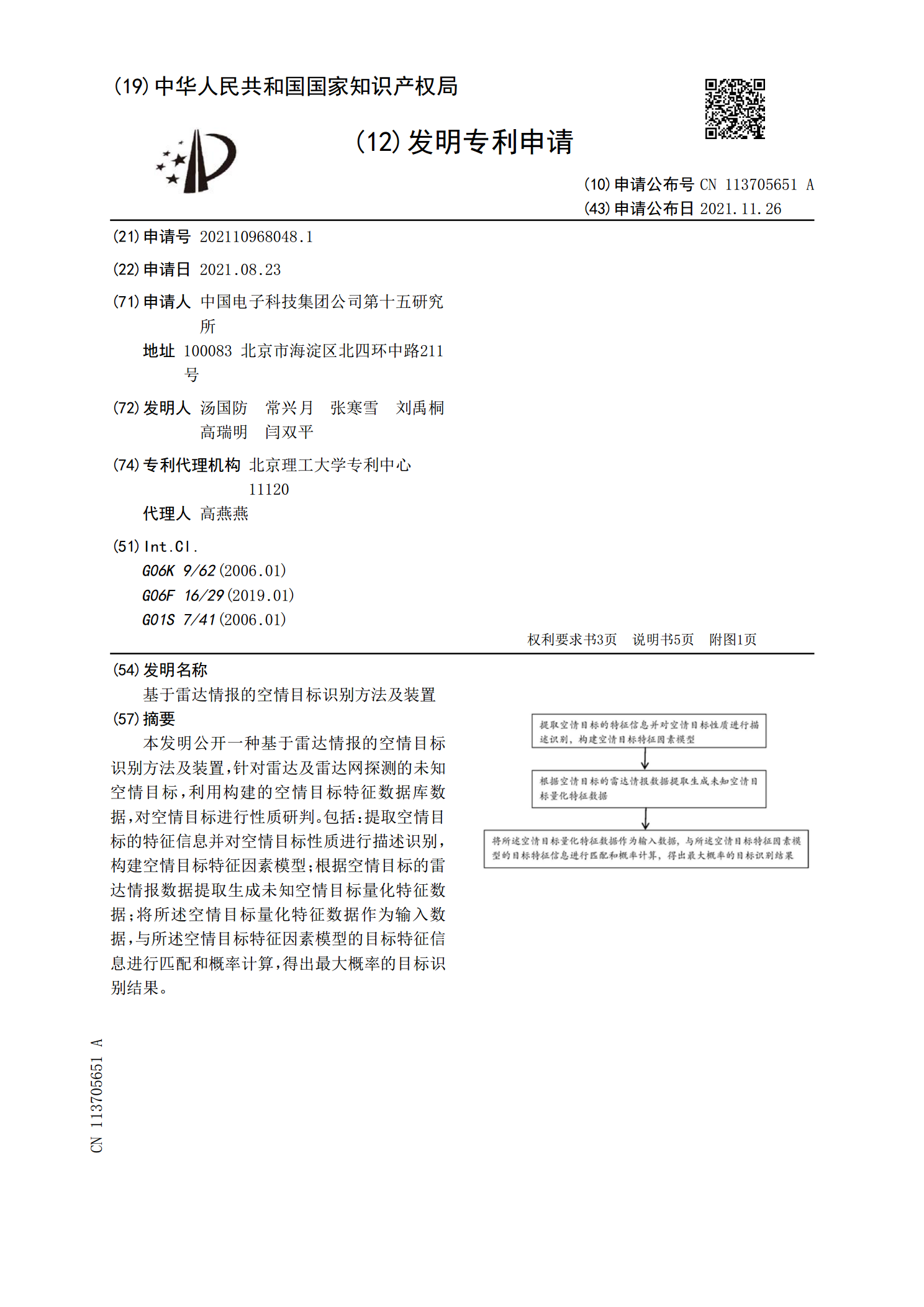
本发明公开一种基于雷达情报的空情目标识别方法及装置,针对雷达及雷达网探测的未知空情目标,利用构建的空情目标特征数据库数据,对空情目标进行性质研判。包括:提取空情目标的特征信息并对空情目标性质进行描述识别,构建空情目标特征因素模型;根据空情目标的雷达情报数据提取生成未知空情目标量化特征数据;将所述空情目标量化特征数据作为输入数据,与所述空情目标特征因素模型的目标特征信息进行匹配和概率计算,得出最大概率的目标识别结果。
基于多域多层数据融合的雷达性能动态评估方法.pdf
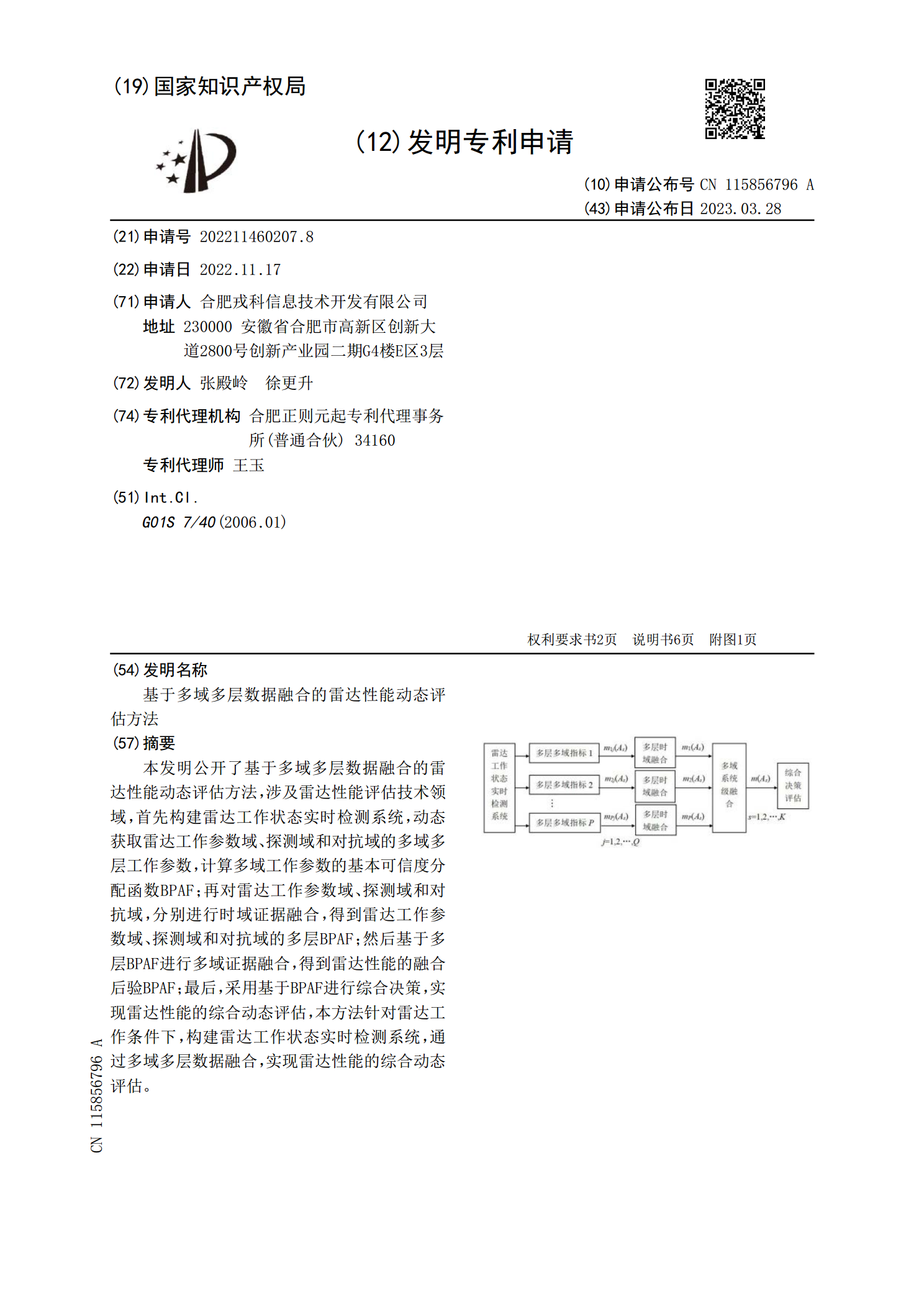
本发明公开了基于多域多层数据融合的雷达性能动态评估方法,涉及雷达性能评估技术领域,首先构建雷达工作状态实时检测系统,动态获取雷达工作参数域、探测域和对抗域的多域多层工作参数,计算多域工作参数的基本可信度分配函数BPAF;再对雷达工作参数域、探测域和对抗域,分别进行时域证据融合,得到雷达工作参数域、探测域和对抗域的多层BPAF;然后基于多层BPAF进行多域证据融合,得到雷达性能的融合后验BPAF;最后,采用基于BPAF进行综合决策,实现雷达性能的综合动态评估,本方法针对雷达工作条件下,构建雷达工作状态实时检