
一种基于伪标签融合的双目深度估计方法.pdf

戊午****jj

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于伪标签融合的双目深度估计方法.pdf
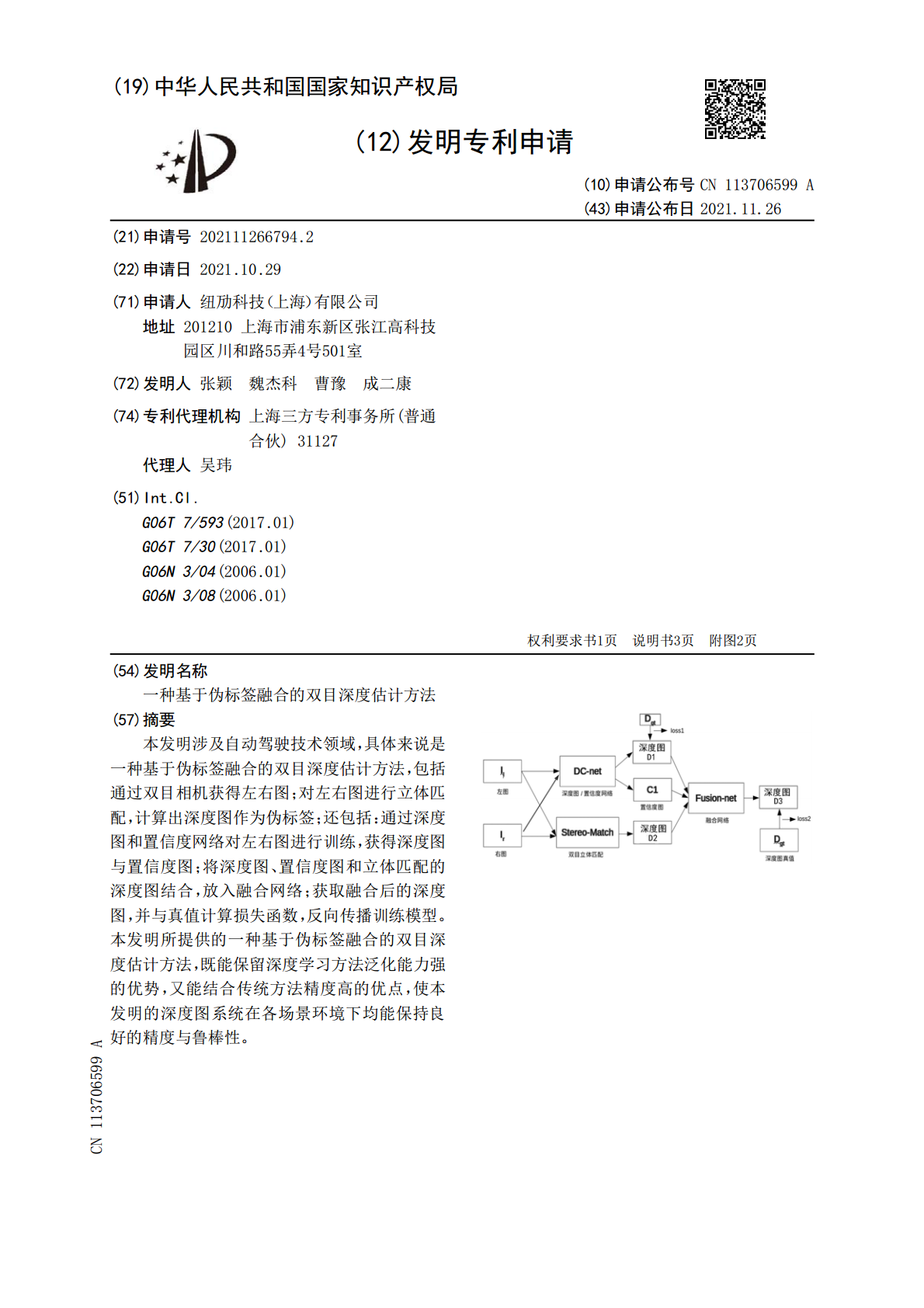
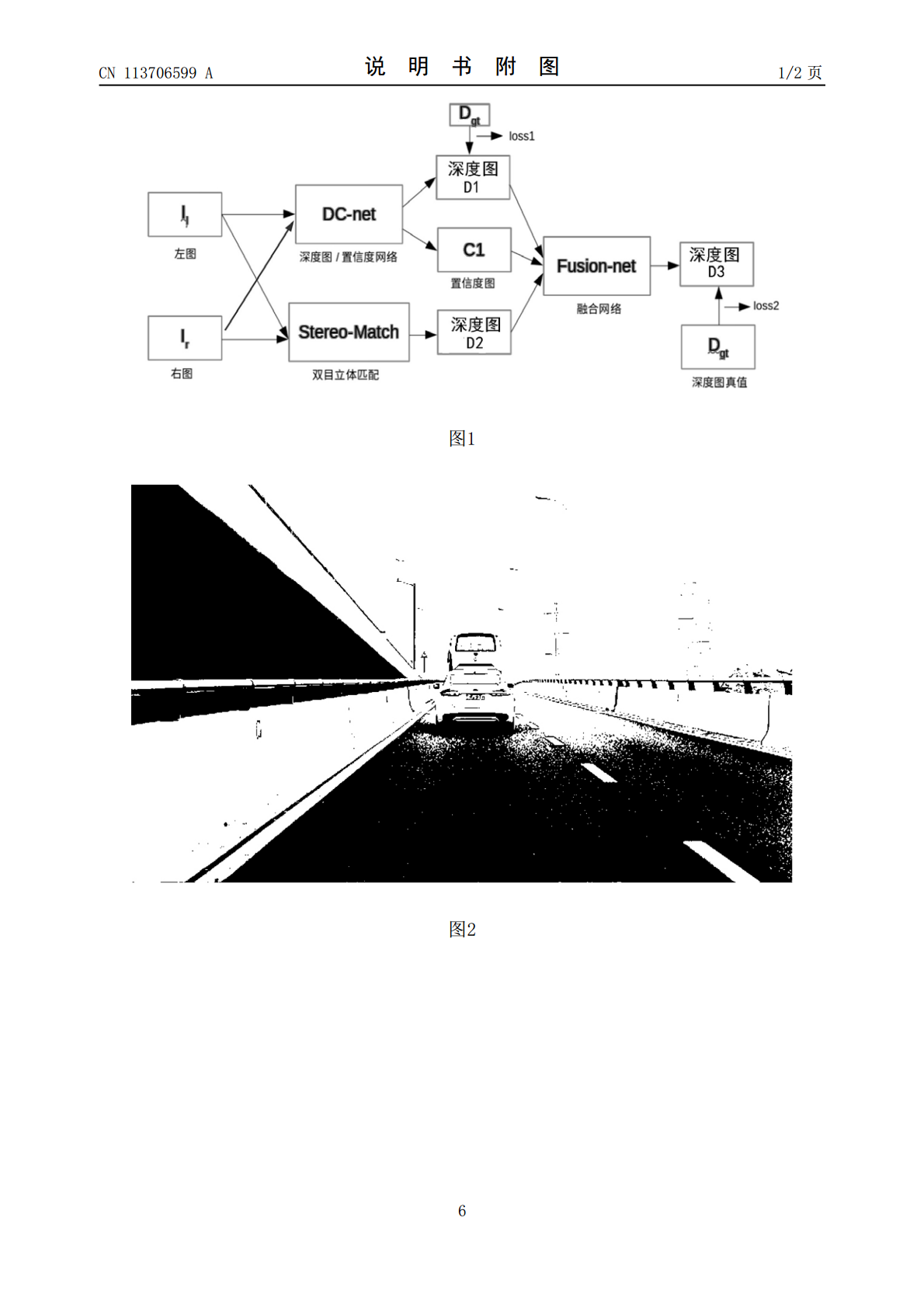
本发明涉及自动驾驶技术领域,具体来说是一种基于伪标签融合的双目深度估计方法,包括通过双目相机获得左右图;对左右图进行立体匹配,计算出深度图作为伪标签;还包括:通过深度图和置信度网络对左右图进行训练,获得深度图与置信度图;将深度图、置信度图和立体匹配的深度图结合,放入融合网络;获取融合后的深度图,并与真值计算损失函数,反向传播训练模型。本发明所提供的一种基于伪标签融合的双目深度估计方法,既能保留深度学习方法泛化能力强的优势,又能结合传统方法精度高的优点,使本发明的深度图系统在各场景环境下均能保持良好的精度与
一种基于伪标签的视线估计方法.pdf
本发明涉及一种基于伪标签的视线估计方法,包括以下步骤:获取面部图像;将所述面部图像输入至训练好的视线评估模型中进行预测得到预测视线;其中,所述视线评估模型在训练时,使用少量有标签的真实训练集对模型进行训练,得到预训练模型,根据增加了随机失活层的所述预训练模型对无标签的数据打上伪标签,计算所述伪标签的不确定值,并保留所述不确定值小于阈值的伪标签对应的数据,将保留的伪标签对应的数据和真实训练集一起重新训练模型,如此循环迭代直至训练完毕,得到所述视线评估模型。本发明大大减轻了视线估计对人工标签的依赖性。
基于双目RGB-D相机深度轮廓估计方法.pdf
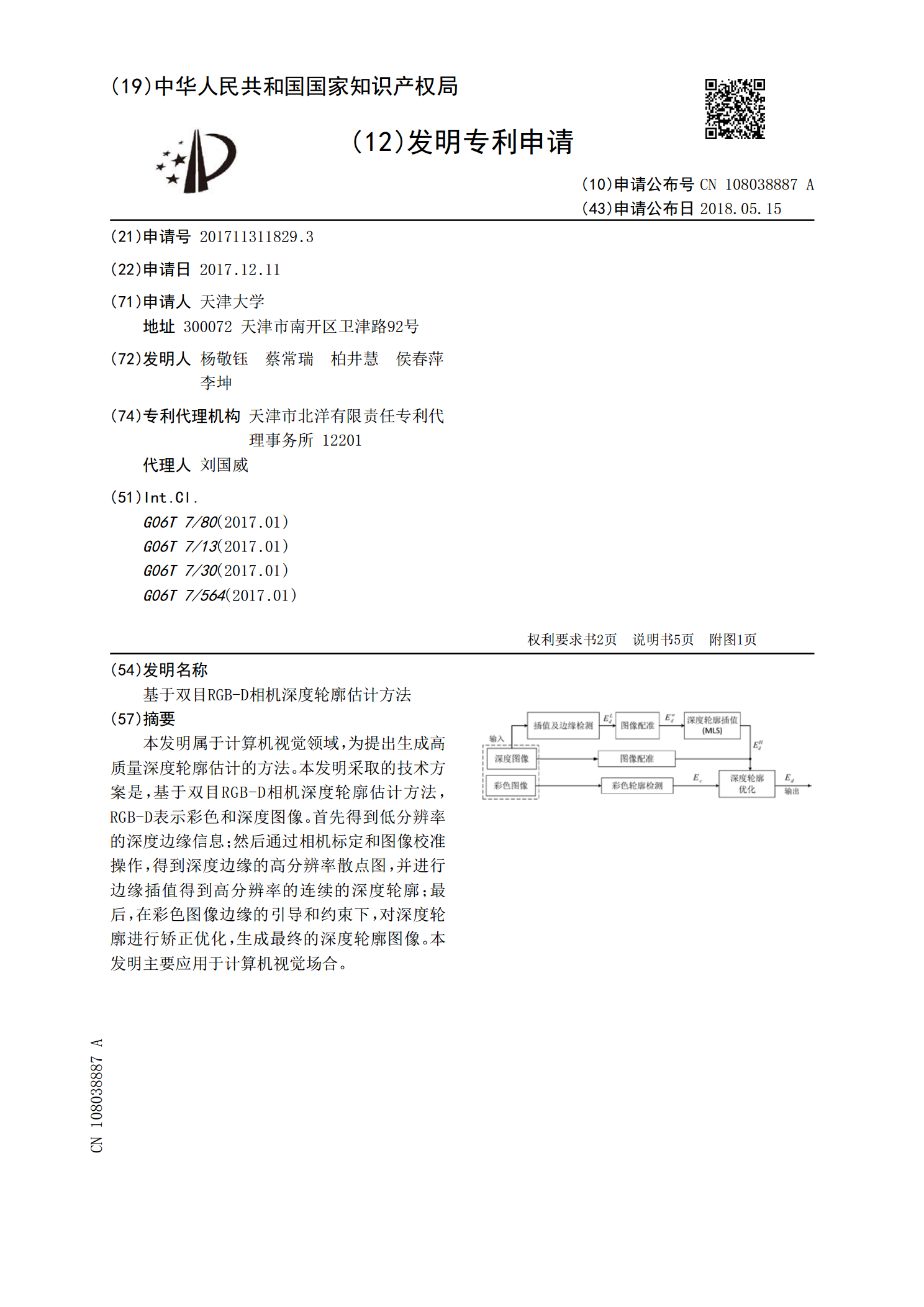
本发明属于计算机视觉领域,为提出生成高质量深度轮廓估计的方法。本发明采取的技术方案是,基于双目RGB‑D相机深度轮廓估计方法,RGB‑D表示彩色和深度图像。首先得到低分辨率的深度边缘信息;然后通过相机标定和图像校准操作,得到深度边缘的高分辨率散点图,并进行边缘插值得到高分辨率的连续的深度轮廓;最后,在彩色图像边缘的引导和约束下,对深度轮廓进行矫正优化,生成最终的深度轮廓图像。本发明主要应用于计算机视觉场合。
融合激光雷达和双目相机的深度估计方法、装置及设备.pdf
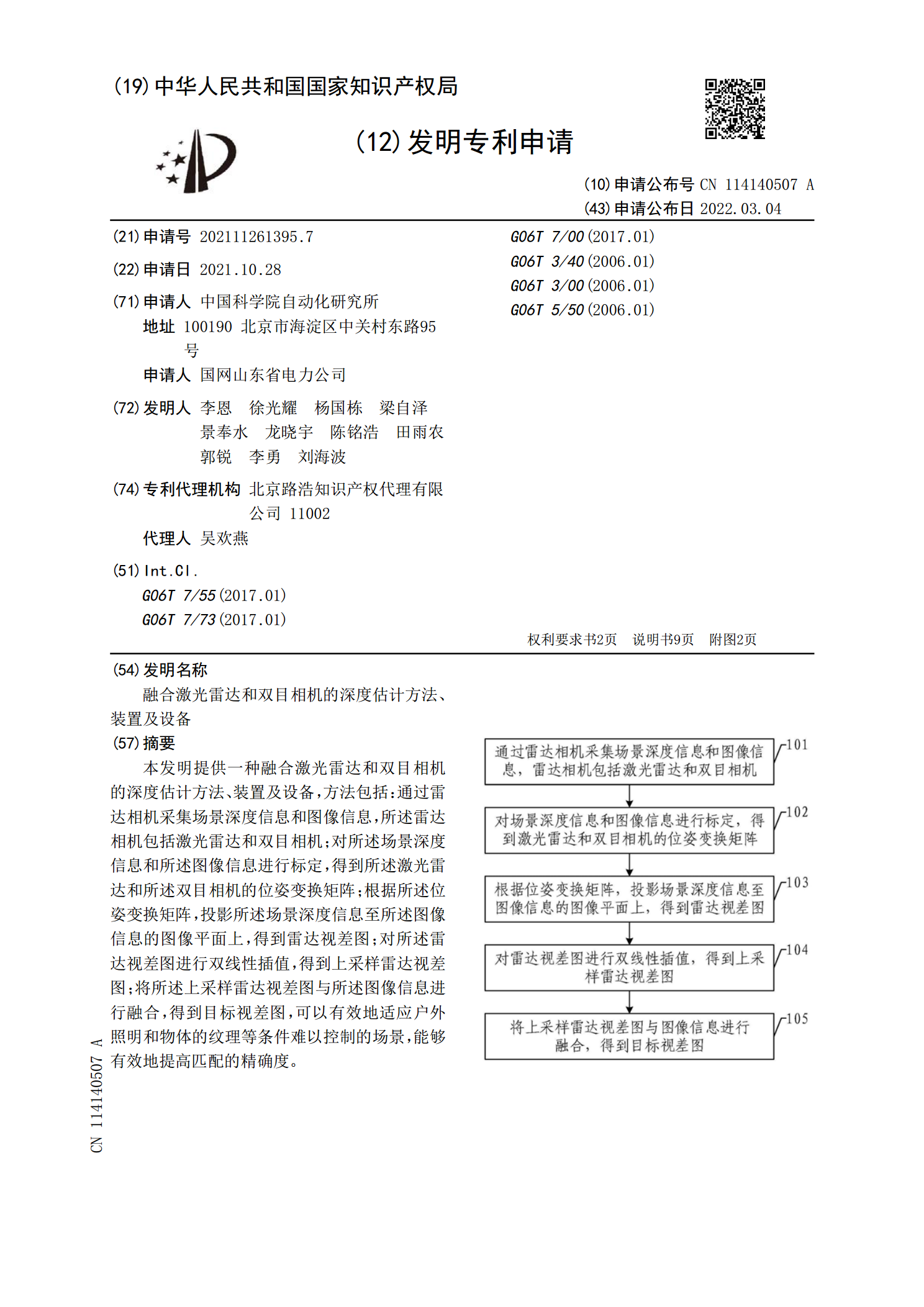
本发明提供一种融合激光雷达和双目相机的深度估计方法、装置及设备,方法包括:通过雷达相机采集场景深度信息和图像信息,所述雷达相机包括激光雷达和双目相机;对所述场景深度信息和所述图像信息进行标定,得到所述激光雷达和所述双目相机的位姿变换矩阵;根据所述位姿变换矩阵,投影所述场景深度信息至所述图像信息的图像平面上,得到雷达视差图;对所述雷达视差图进行双线性插值,得到上采样雷达视差图;将所述上采样雷达视差图与所述图像信息进行融合,得到目标视差图,可以有效地适应户外照明和物体的纹理等条件难以控制的场景,能够有效地提高
一种基于无监督自适应网络的水下双目深度估计方法.pdf
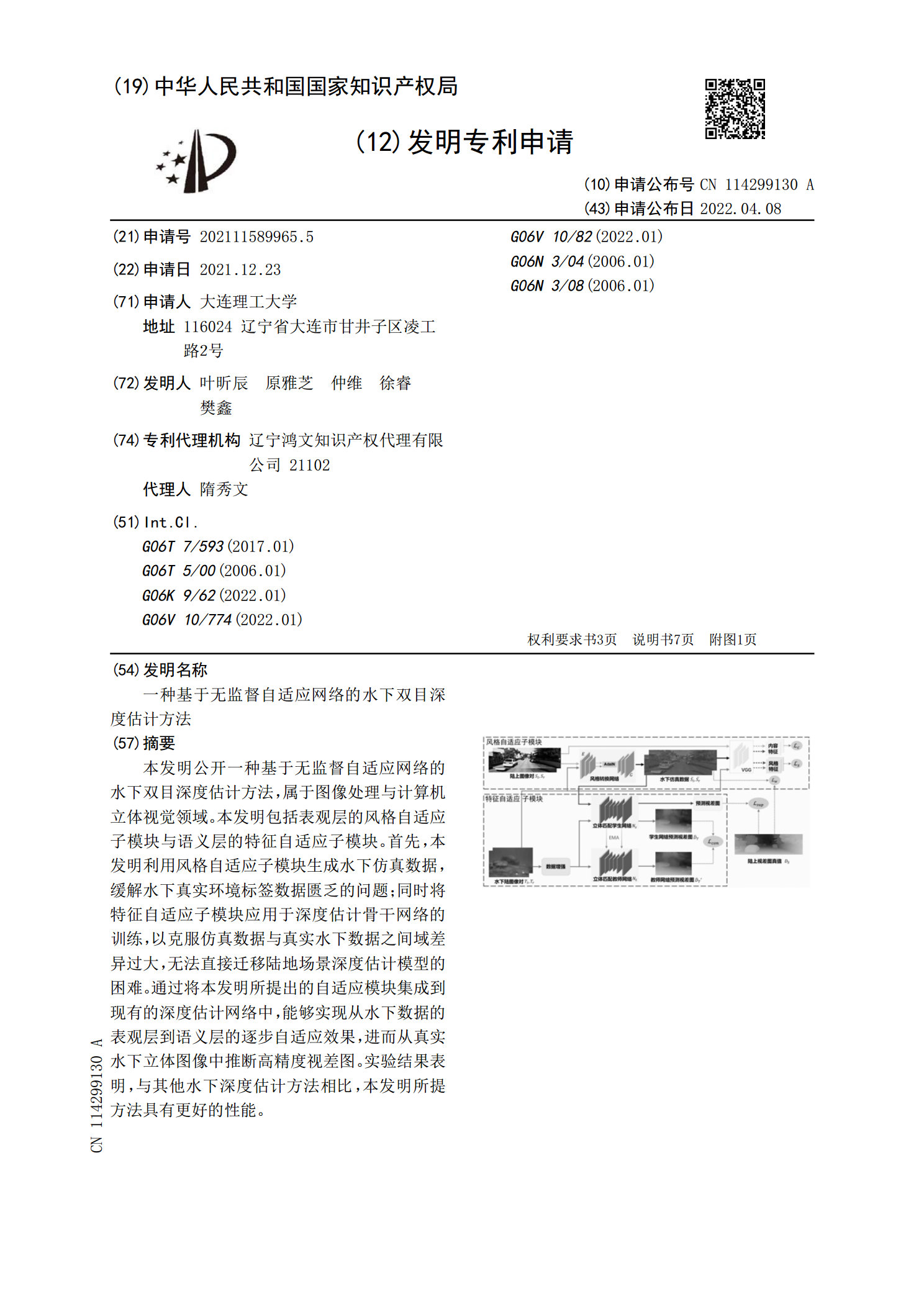
本发明公开一种基于无监督自适应网络的水下双目深度估计方法,属于图像处理与计算机立体视觉领域。本发明包括表观层的风格自适应子模块与语义层的特征自适应子模块。首先,本发明利用风格自适应子模块生成水下仿真数据,缓解水下真实环境标签数据匮乏的问题;同时将特征自适应子模块应用于深度估计骨干网络的训练,以克服仿真数据与真实水下数据之间域差异过大,无法直接迁移陆地场景深度估计模型的困难。通过将本发明所提出的自适应模块集成到现有的深度估计网络中,能够实现从水下数据的表观层到语义层的逐步自适应效果,进而从真实水下立体图像中