
用于预测车辆起动的系统和方法.pdf

猫巷****永安

1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于预测车辆起动的系统和方法.pdf
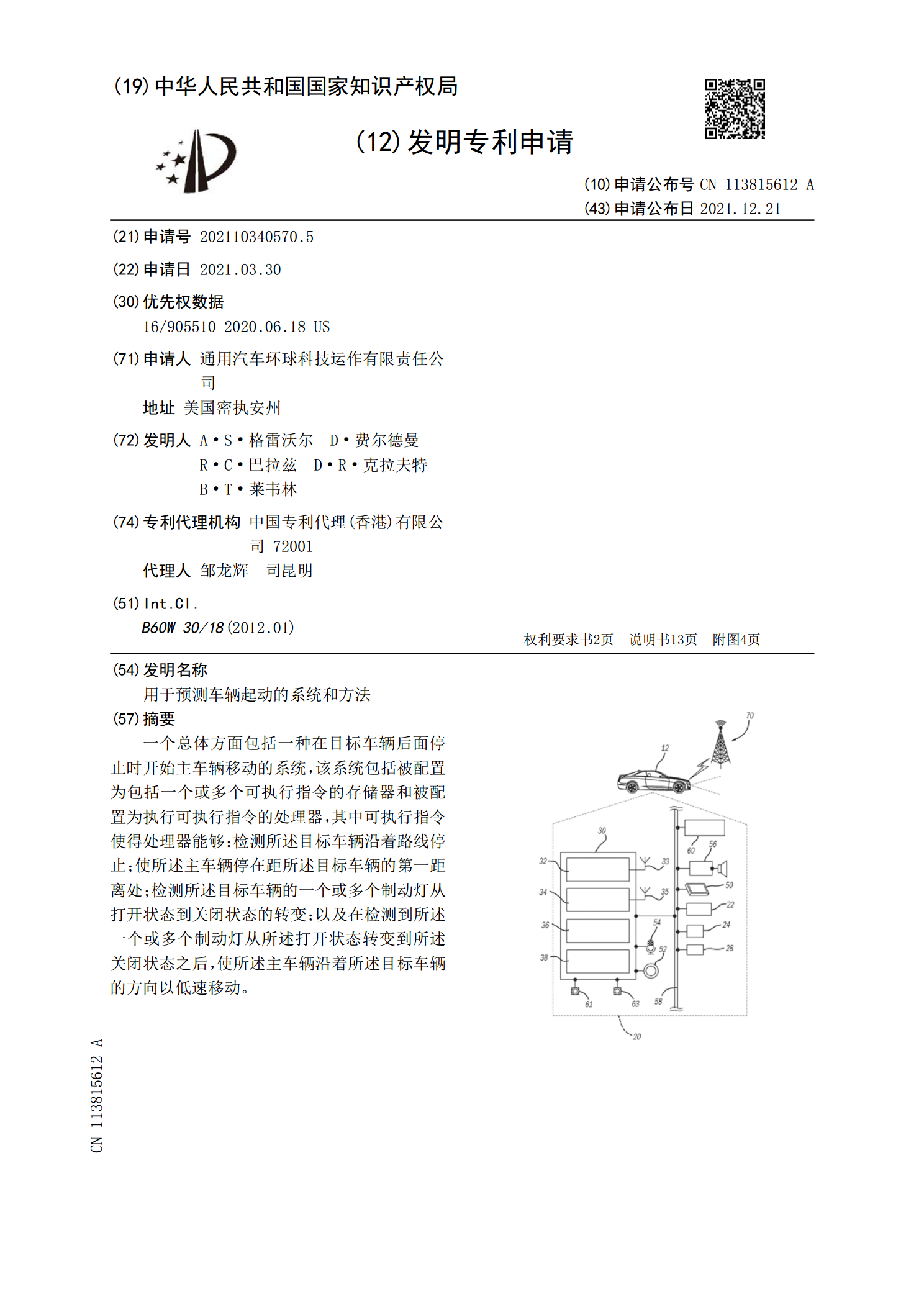
一个总体方面包括一种在目标车辆后面停止时开始主车辆移动的系统,该系统包括被配置为包括一个或多个可执行指令的存储器和被配置为执行可执行指令的处理器,其中可执行指令使得处理器能够:检测所述目标车辆沿着路线停止;使所述主车辆停在距所述目标车辆的第一距离处;检测所述目标车辆的一个或多个制动灯从打开状态到关闭状态的转变;以及在检测到所述一个或多个制动灯从所述打开状态转变到所述关闭状态之后,使所述主车辆沿着所述目标车辆的方向以低速移动。

用于车辆的被动起动的方法和系统.pdf
本发明涉及通过车辆(2)车载的车内确认系统(1)执行的用于在使得拥有钥匙装置(3)的操作者被允许触发车辆的被动起动之前证实钥匙装置处于车辆内部的方法。车内确认系统确定车辆与钥匙装置之间具有安全通信链接。车内确认系统进一步在车辆内部提供车辆声音信号。此外,车内确认系统从钥匙装置经由安全通信链接接收钥匙装置信号,该钥匙装置信号源自于通过与钥匙装置相关联的一个或多个传感器检测到的声音信号。车内确认系统进一步比较车辆声音信号与钥匙装置信号。此外,当钥匙装置信号匹配车辆声音信号时车内确认系统允许车辆的起动。本发明也
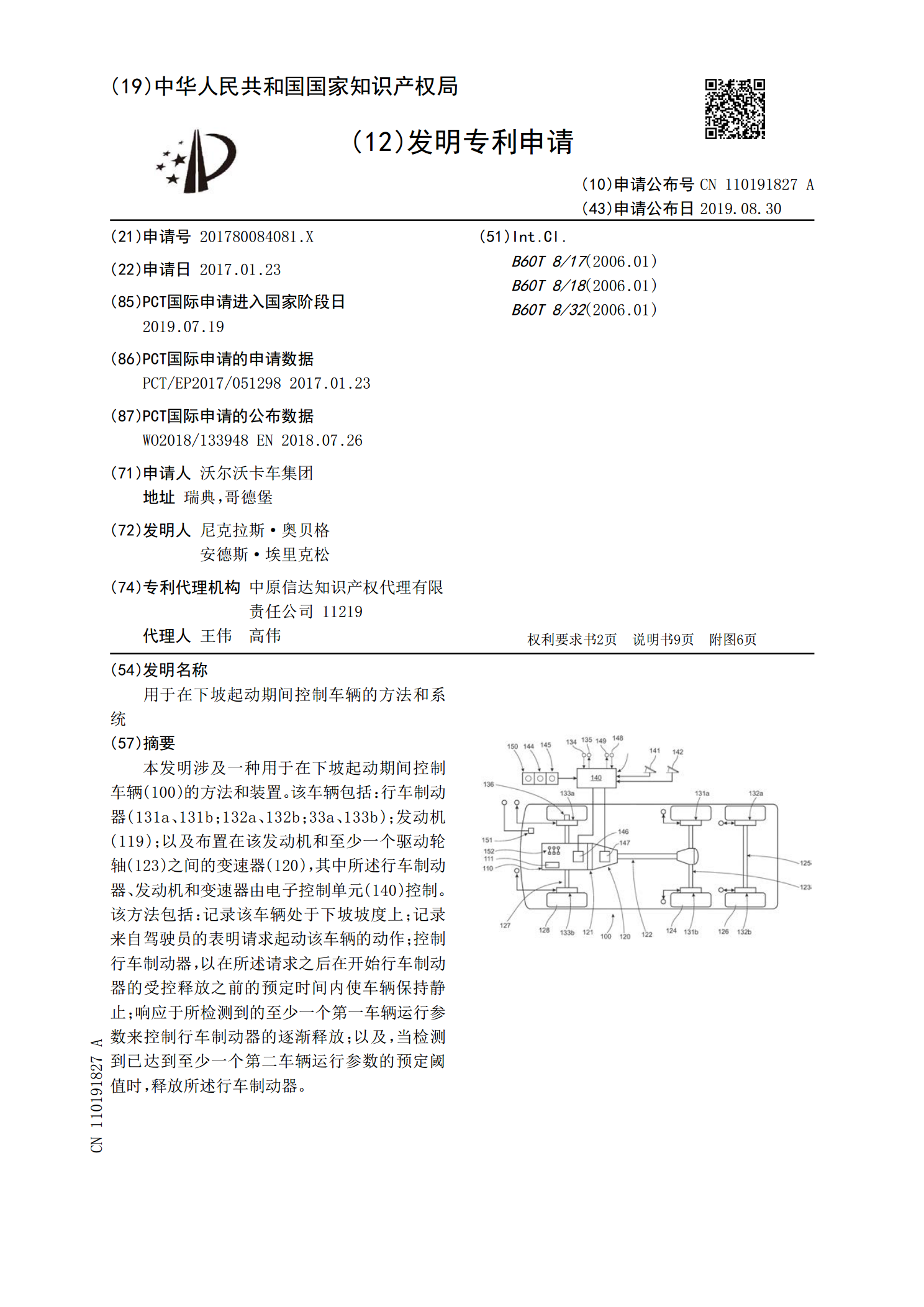
用于在下坡起动期间控制车辆的方法和系统.pdf
本发明涉及一种用于在下坡起动期间控制车辆(100)的方法和装置。该车辆包括:行车制动器(131a、131b;132a、132b;33a、133b);发动机(119);以及布置在该发动机和至少一个驱动轮轴(123)之间的变速器(120),其中所述行车制动器、发动机和变速器由电子控制单元(140)控制。该方法包括:记录该车辆处于下坡坡度上;记录来自驾驶员的表明请求起动该车辆的动作;控制行车制动器,以在所述请求之后在开始行车制动器的受控释放之前的预定时间内使车辆保持静止;响应于所检测到的至少一个第一车辆运行参数
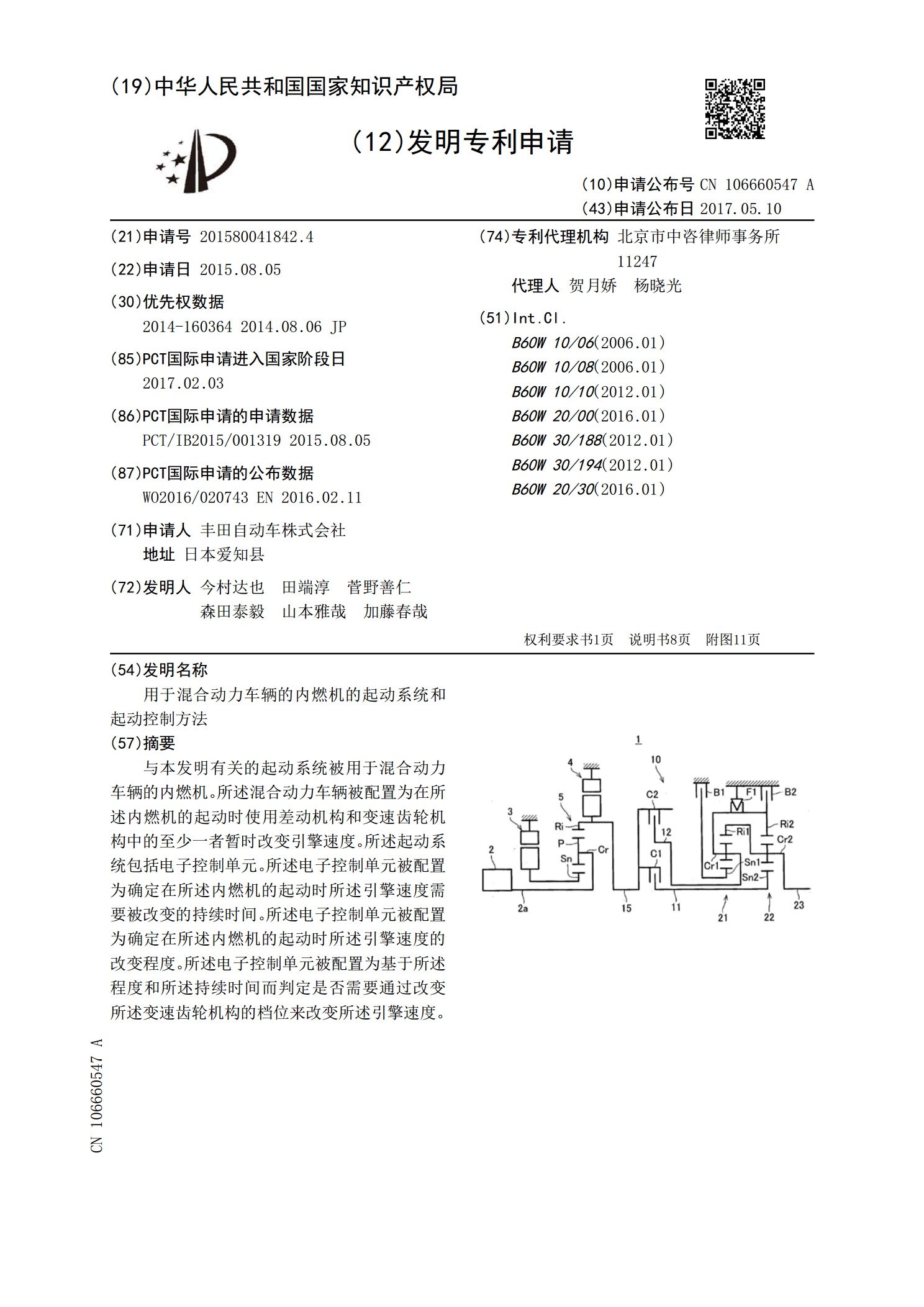
用于混合动力车辆的内燃机的起动系统和起动控制方法.pdf
与本发明有关的起动系统被用于混合动力车辆的内燃机。所述混合动力车辆被配置为在所述内燃机的起动时使用差动机构和变速齿轮机构中的至少一者暂时改变引擎速度。所述起动系统包括电子控制单元。所述电子控制单元被配置为确定在所述内燃机的起动时所述引擎速度需要被改变的持续时间。所述电子控制单元被配置为确定在所述内燃机的起动时所述引擎速度的改变程度。所述电子控制单元被配置为基于所述程度和所述持续时间而判定是否需要通过改变所述变速齿轮机构的档位来改变所述引擎速度。

用于起动车辆的方法.pdf
本发明涉及一种用于起动具有燃料电池系统(2)的车辆(1)的方法,所述燃料电池系统用于在车辆(1)中提供电驱动功率,其中,能够借助于远程触发单元(9)不依赖于用户(8)在紧邻车辆(1)的附近出现地开始起动过程。本发明的特征在于,仅当存在远程触发单元(9)的起动信号并且同时在车辆(1)、燃料电池系统(2)和/或车辆(1)的环境中所检测的温度低于预定的温度极限值时,才通过远程触发单元(9)触发所述起动过程。