
一种基于改进R3Det旋转目标检测算法的茶叶嫩芽识别与采摘点定位方法.pdf

小代****回来

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于改进R3Det旋转目标检测算法的茶叶嫩芽识别与采摘点定位方法.pdf
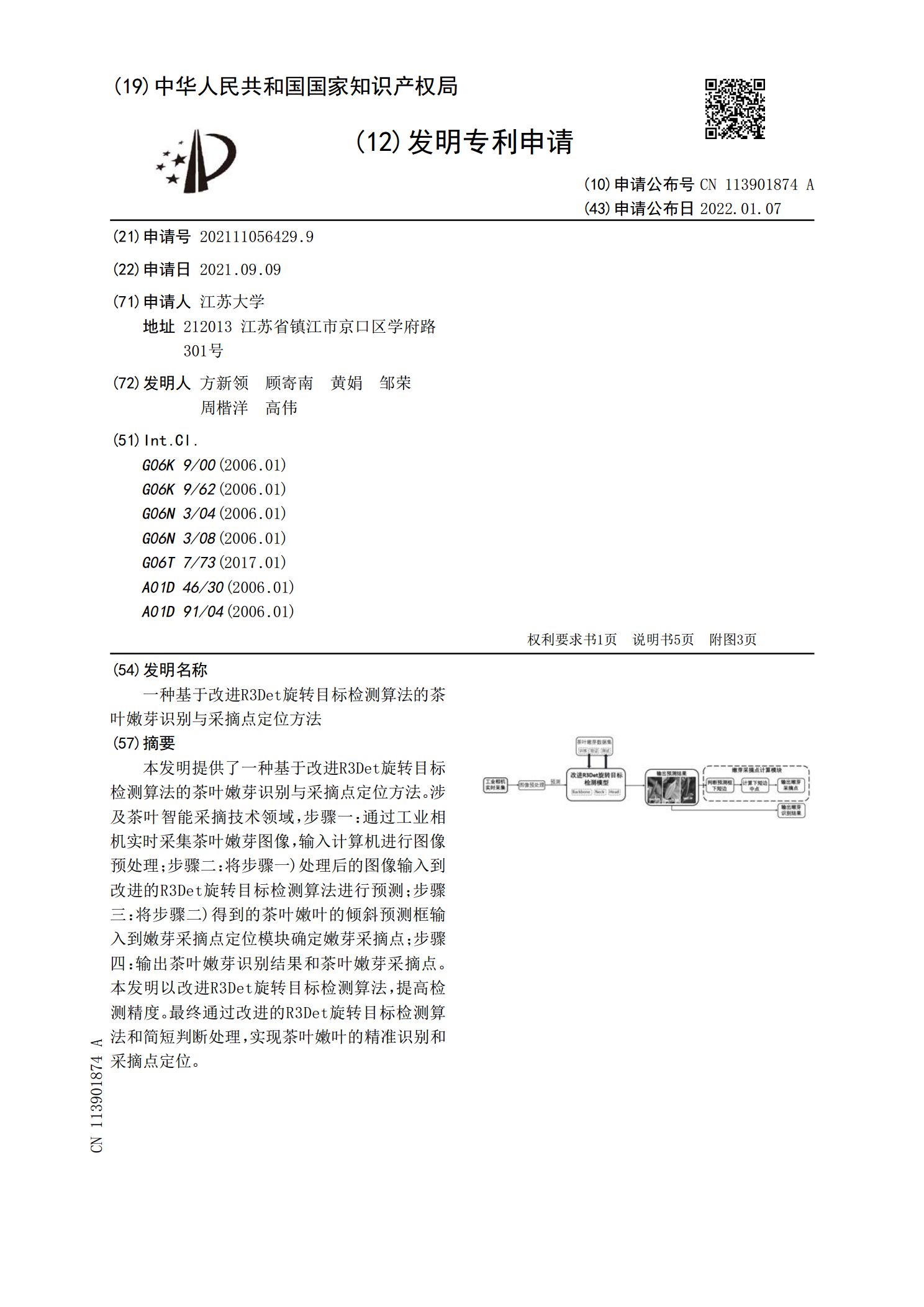
本发明提供了一种基于改进R3Det旋转目标检测算法的茶叶嫩芽识别与采摘点定位方法。涉及茶叶智能采摘技术领域,步骤一:通过工业相机实时采集茶叶嫩芽图像,输入计算机进行图像预处理;步骤二:将步骤一)处理后的图像输入到改进的R3Det旋转目标检测算法进行预测;步骤三:将步骤二)得到的茶叶嫩叶的倾斜预测框输入到嫩芽采摘点定位模块确定嫩芽采摘点;步骤四:输出茶叶嫩芽识别结果和茶叶嫩芽采摘点。本发明以改进R3Det旋转目标检测算法,提高检测精度。最终通过改进的R3Det旋转目标检测算法和简短判断处理,实现茶叶嫩叶的精
一种基于深度学习算法的茶叶嫩芽采摘点定位方法.pdf
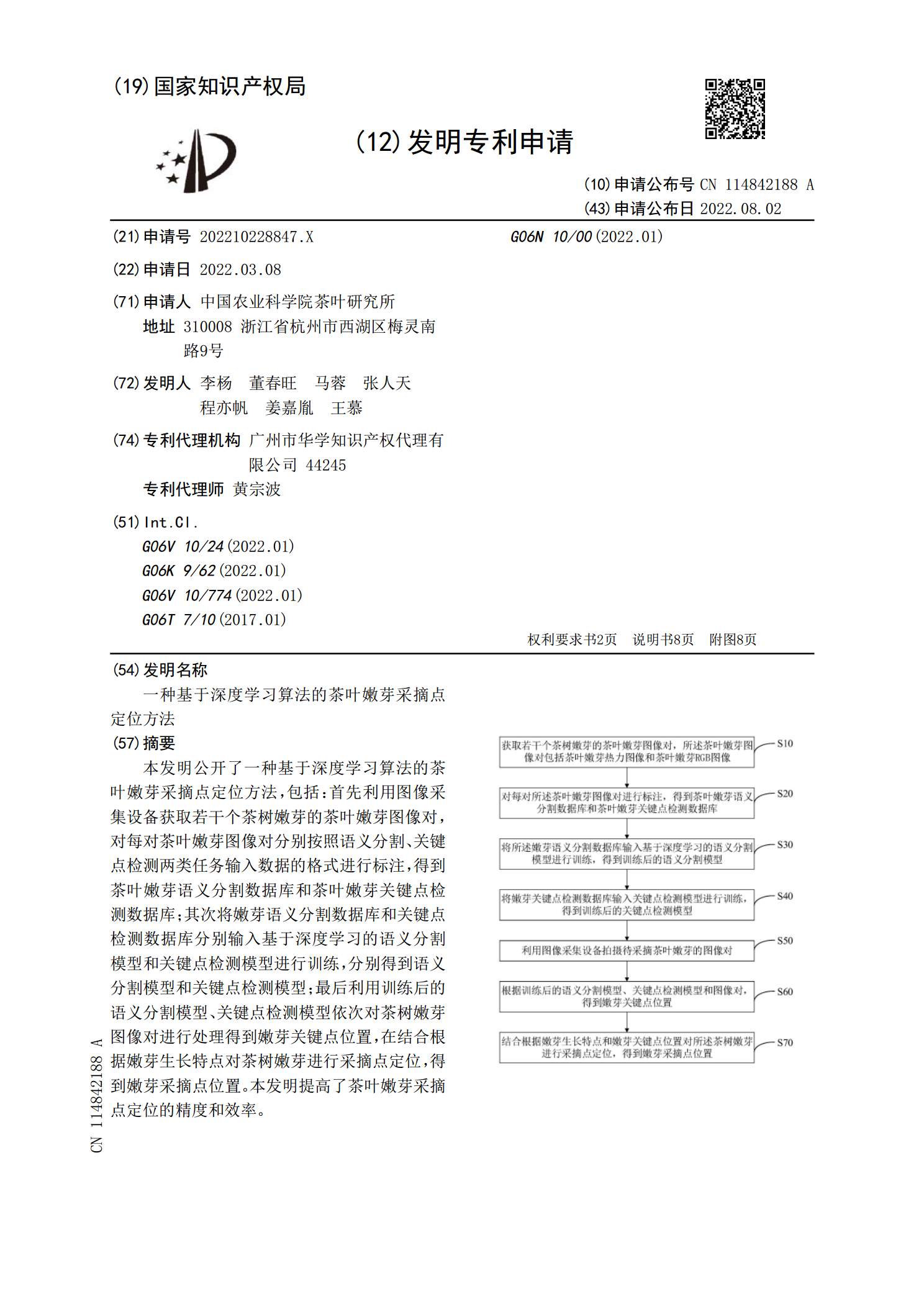
本发明公开了一种基于深度学习算法的茶叶嫩芽采摘点定位方法,包括:首先利用图像采集设备获取若干个茶树嫩芽的茶叶嫩芽图像对,对每对茶叶嫩芽图像对分别按照语义分割、关键点检测两类任务输入数据的格式进行标注,得到茶叶嫩芽语义分割数据库和茶叶嫩芽关键点检测数据库;其次将嫩芽语义分割数据库和关键点检测数据库分别输入基于深度学习的语义分割模型和关键点检测模型进行训练,分别得到语义分割模型和关键点检测模型;最后利用训练后的语义分割模型、关键点检测模型依次对茶树嫩芽图像对进行处理得到嫩芽关键点位置,在结合根据嫩芽生长特点对
改进YOLOv5目标检测模型构建方法及用于茶嫩芽识别与采摘点定位方法.pdf
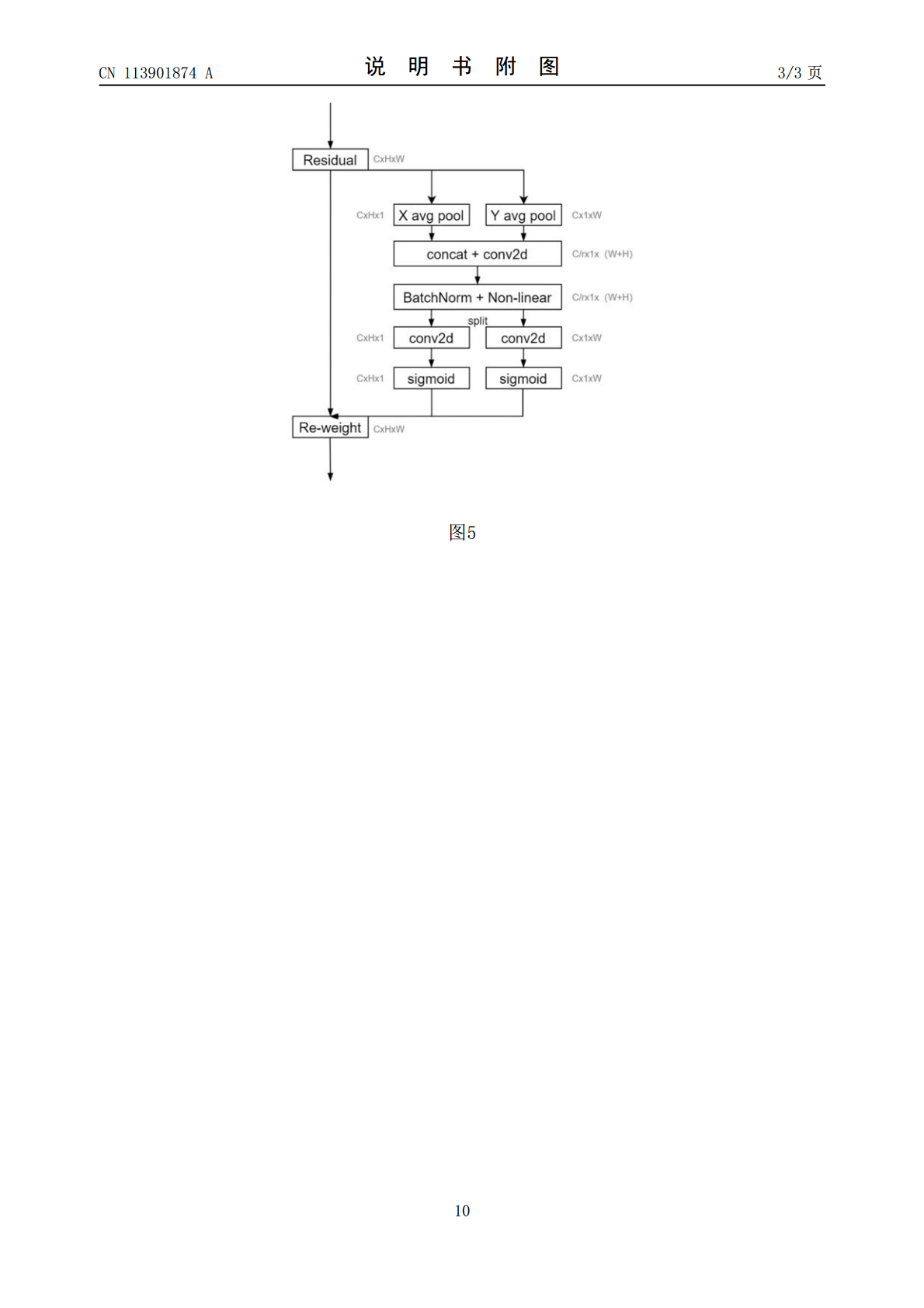
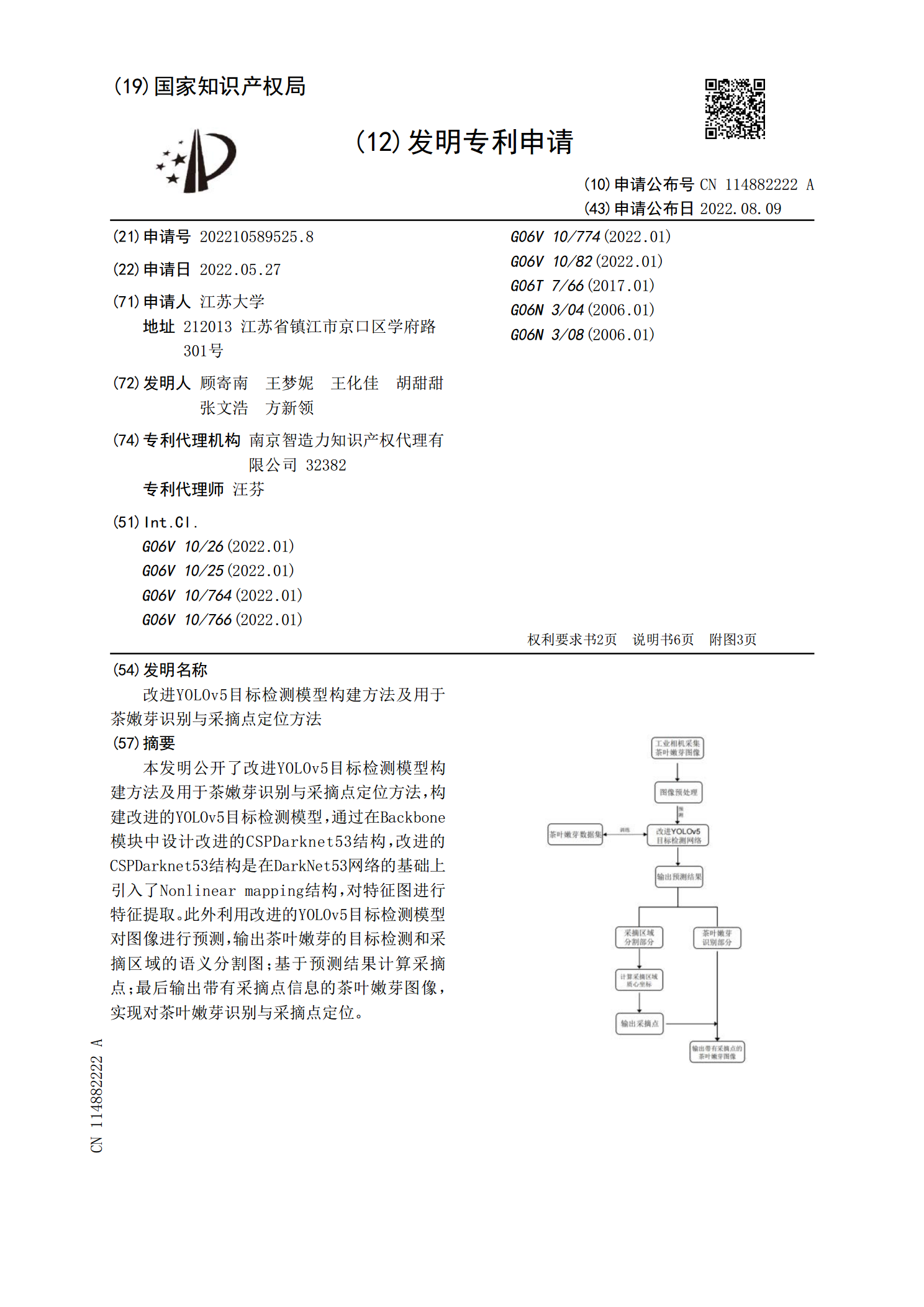
本发明公开了改进YOLOv5目标检测模型构建方法及用于茶嫩芽识别与采摘点定位方法,构建改进的YOLOv5目标检测模型,通过在Backbone模块中设计改进的CSPDarknet53结构,改进的CSPDarknet53结构是在DarkNet53网络的基础上引入了Nonlinearmapping结构,对特征图进行特征提取。此外利用改进的YOLOv5目标检测模型对图像进行预测,输出茶叶嫩芽的目标检测和采摘区域的语义分割图;基于预测结果计算采摘点;最后输出带有采摘点信息的茶叶嫩芽图像,实现对茶叶嫩芽识别与采摘点定
基于融合热力图像和RGB图像的茶叶嫩芽采摘点定位方法.pdf
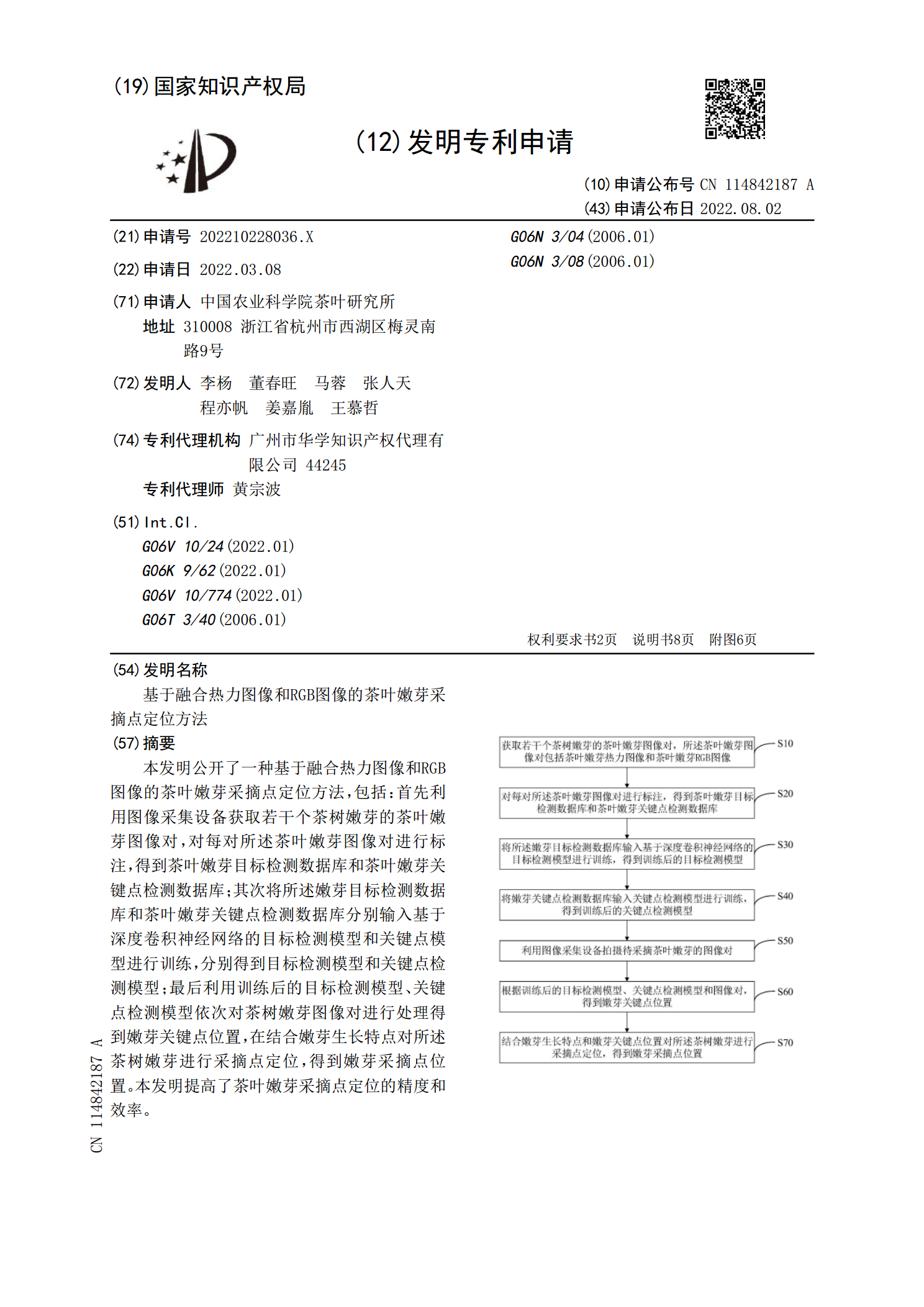
本发明公开了一种基于融合热力图像和RGB图像的茶叶嫩芽采摘点定位方法,包括:首先利用图像采集设备获取若干个茶树嫩芽的茶叶嫩芽图像对,对每对所述茶叶嫩芽图像对进行标注,得到茶叶嫩芽目标检测数据库和茶叶嫩芽关键点检测数据库;其次将所述嫩芽目标检测数据库和茶叶嫩芽关键点检测数据库分别输入基于深度卷积神经网络的目标检测模型和关键点模型进行训练,分别得到目标检测模型和关键点检测模型;最后利用训练后的目标检测模型、关键点检测模型依次对茶树嫩芽图像对进行处理得到嫩芽关键点位置,在结合嫩芽生长特点对所述茶树嫩芽进行采摘点

基于实例分割的大场景下茶叶嫩芽轮廓提取与采摘点定位.docx
基于实例分割的大场景下茶叶嫩芽轮廓提取与采摘点定位一、研究背景和意义随着社会经济的快速发展,茶叶产业在全球范围内得到了广泛关注。茶叶作为中国传统的特色农产品,具有悠久的历史和丰富的文化内涵。茶叶产业逐渐向大农业、大健康、大旅游等多元化方向发展,对茶叶嫩芽的品质和产量提出了更高的要求。在实际生产过程中,茶叶嫩芽的采摘和加工往往面临着诸多挑战,如嫩芽的形态特征难以准确识别、采摘点定位不准确等问题。这些问题不仅影响了茶叶的品质和产量,也制约了茶叶产业的发展。实例分割技术是一种基于深度学习的目标检测方法,通过对图