
货架定位方法、装置、货架搬运设备及存储介质.pdf

玄静****写意

1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
货架定位方法、装置、货架搬运设备及存储介质.pdf
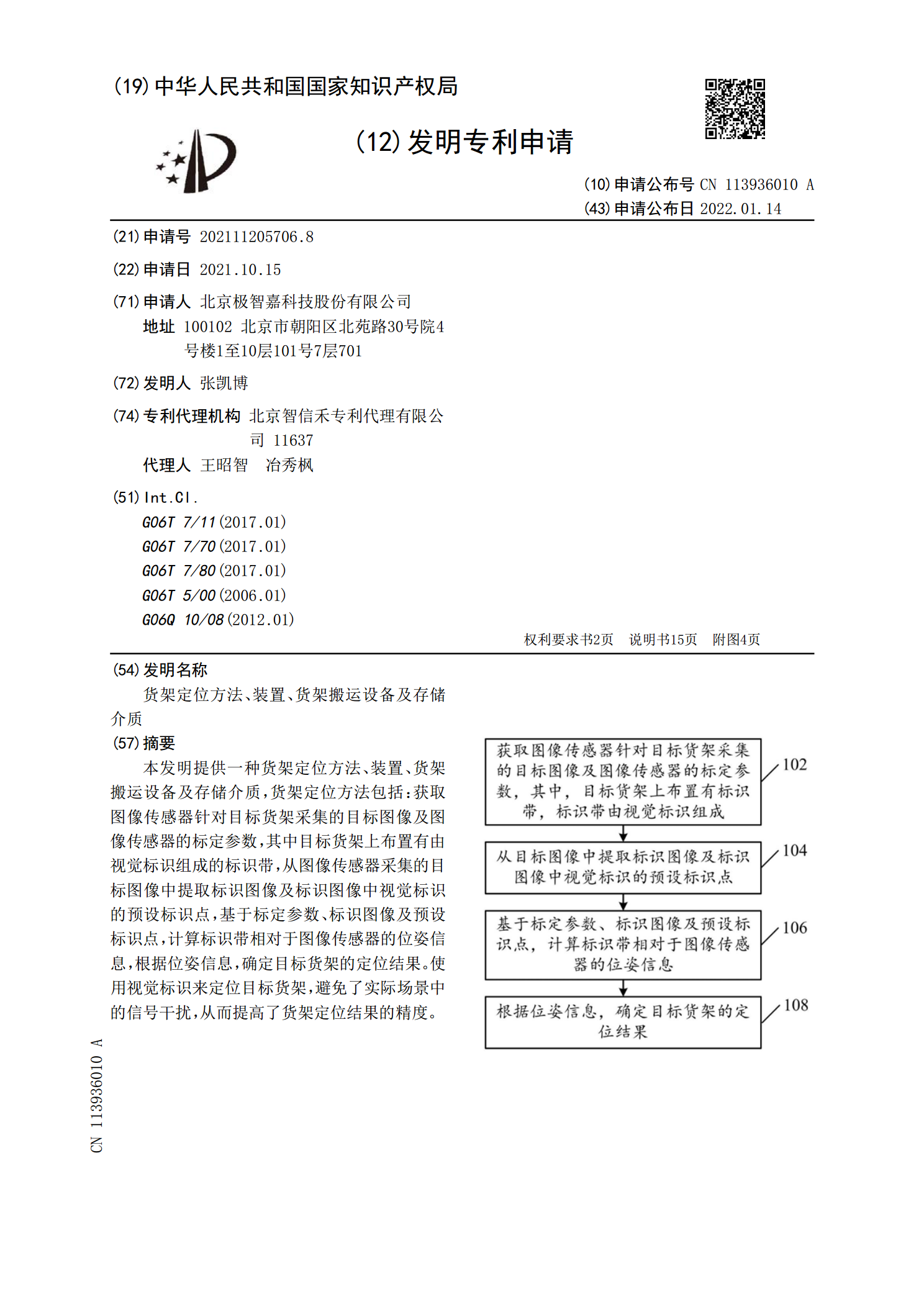
本发明提供一种货架定位方法、装置、货架搬运设备及存储介质,货架定位方法包括:获取图像传感器针对目标货架采集的目标图像及图像传感器的标定参数,其中目标货架上布置有由视觉标识组成的标识带,从图像传感器采集的目标图像中提取标识图像及标识图像中视觉标识的预设标识点,基于标定参数、标识图像及预设标识点,计算标识带相对于图像传感器的位姿信息,根据位姿信息,确定目标货架的定位结果。使用视觉标识来定位目标货架,避免了实际场景中的信号干扰,从而提高了货架定位结果的精度。

货架线检测方法、装置、计算机设备和存储介质.pdf
本申请涉及一种货架线检测方法、装置、计算机设备和存储介质。该方法包括:获取目标图像;通过已训练好的目标检测模型,确定目标图像中每个像素点对应的第一位置标签与第二位置标签;第一位置标签用于表征像素点是否为货架线内部像素点,第二位置标签用于表征像素点是否为头部像素点或尾部像素点;基于目标图像中各像素点的第一位置标签,确定至少一个货架线像素点集合;在每个货架线像素点集合中,基于各像素点的第二位置标签分别确定头部像素点集合与尾部像素点集合;基于每个头部像素点集合与相应尾部像素点集合,确定目标图像中的相应货架线的四

货架存储设备.ppt
货架存储设备1、货架货架的作用及功能2、货架的分类3、几种典型货架

搬运机器人、货架、仓储系统以及搬运货架的方法.pdf
本发明的实施例提供了一种搬运机器人、货架、仓储系统以及搬运货架的方法。所述搬运机器人包括:轮廓传感器,所述轮廓传感器的检测面朝上,所述轮廓传感器用于当所述轮廓传感器在货架下方时,感测所述货架底部的支撑构件的轮廓;以及处理单元,其设置在所述搬运机器人上,用于根据所述支撑构件的轮廓控制所述搬运机器人与所述货架耦接,以搬运所述货架。本发明利用搬运机器人上设置的轮廓传感器来识别货架的支撑构件的轮廓,可以使搬运机器人与货架对准,避免两者在耦接时发生错误操作,从而实现仓储系统的自动化和智能化。
一种物流货架搬运机器人及物流货架搬运方法.pdf
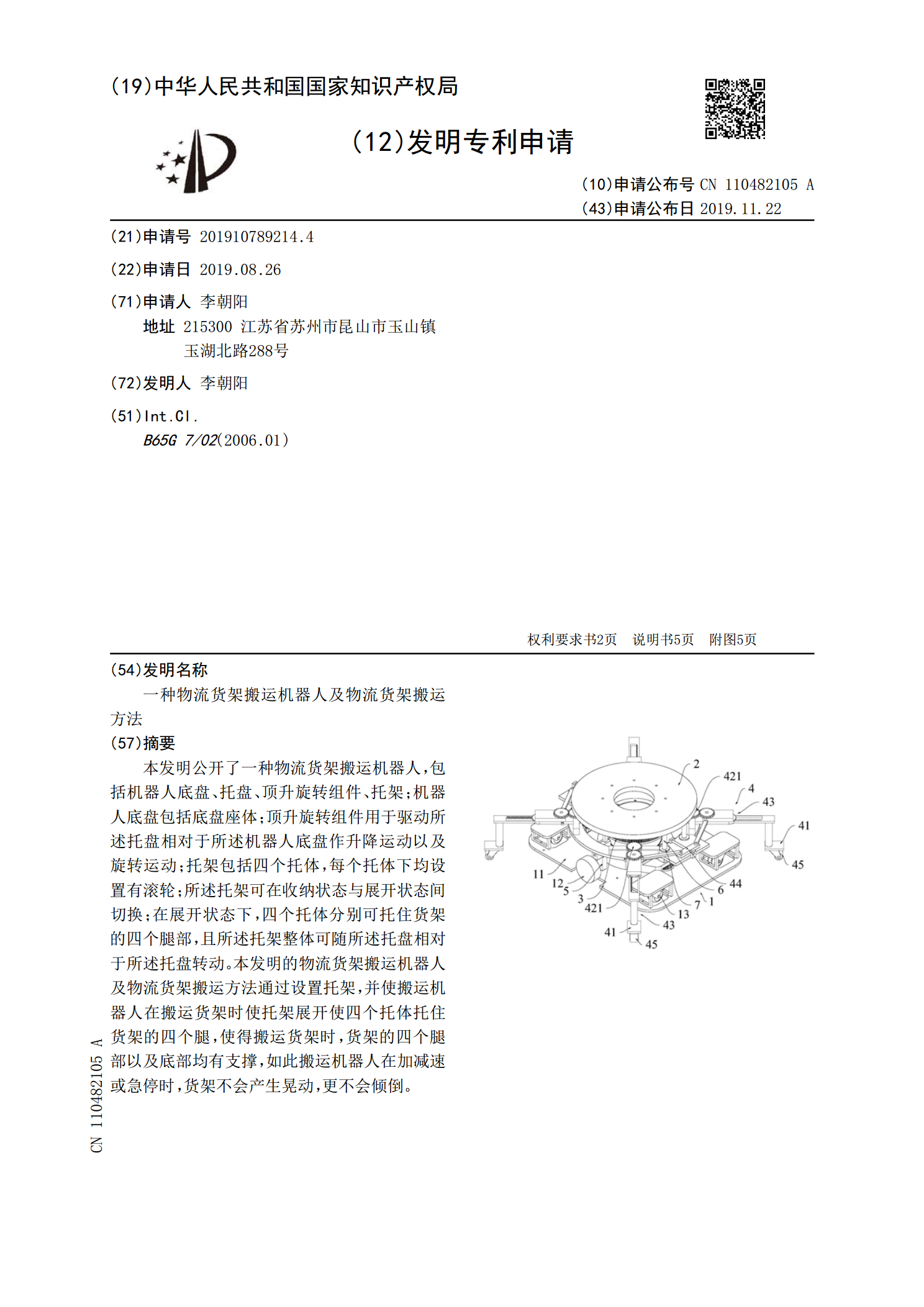
本发明公开了一种物流货架搬运机器人,包括机器人底盘、托盘、顶升旋转组件、托架;机器人底盘包括底盘座体;顶升旋转组件用于驱动所述托盘相对于所述机器人底盘作升降运动以及旋转运动;托架包括四个托体,每个托体下均设置有滚轮;所述托架可在收纳状态与展开状态间切换;在展开状态下,四个托体分别可托住货架的四个腿部,且所述托架整体可随所述托盘相对于所述托盘转动。本发明的物流货架搬运机器人及物流货架搬运方法通过设置托架,并使搬运机器人在搬运货架时使托架展开使四个托体托住货架的四个腿,使得搬运货架时,货架的四个腿部以及底部均