
一种基于深度学习的车位检测方法.pdf

努力****妙风

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于深度学习的车位检测方法.pdf
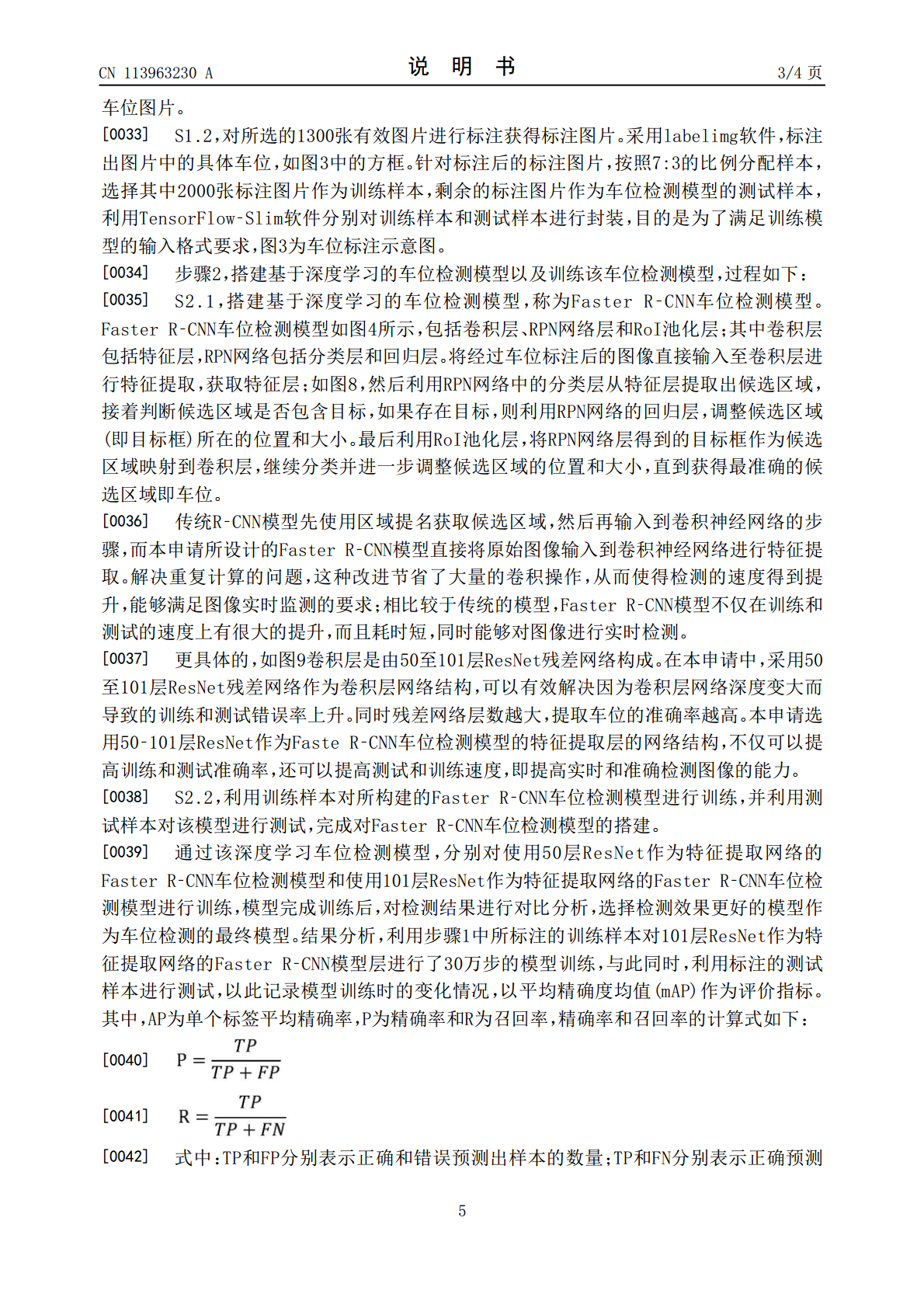
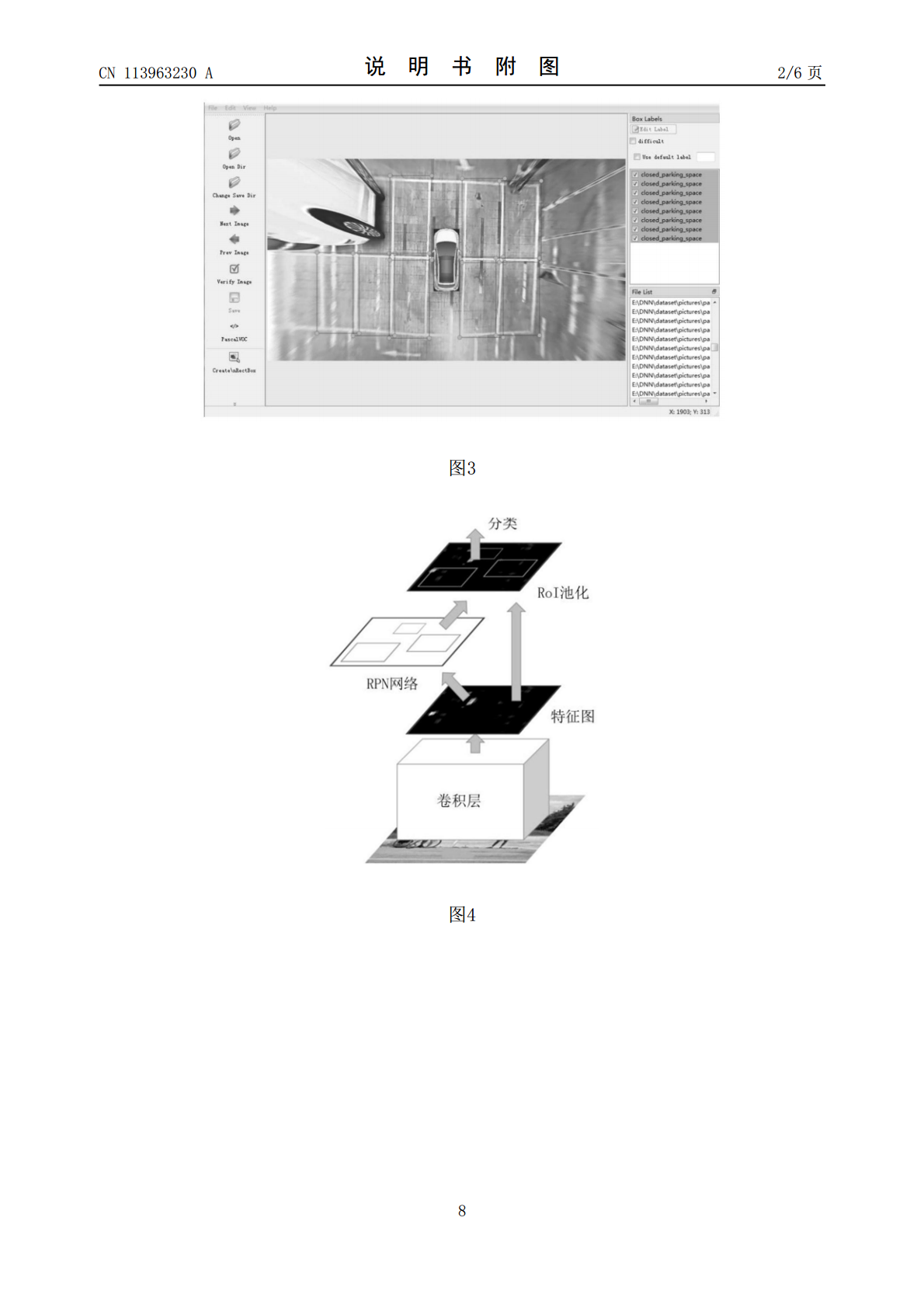
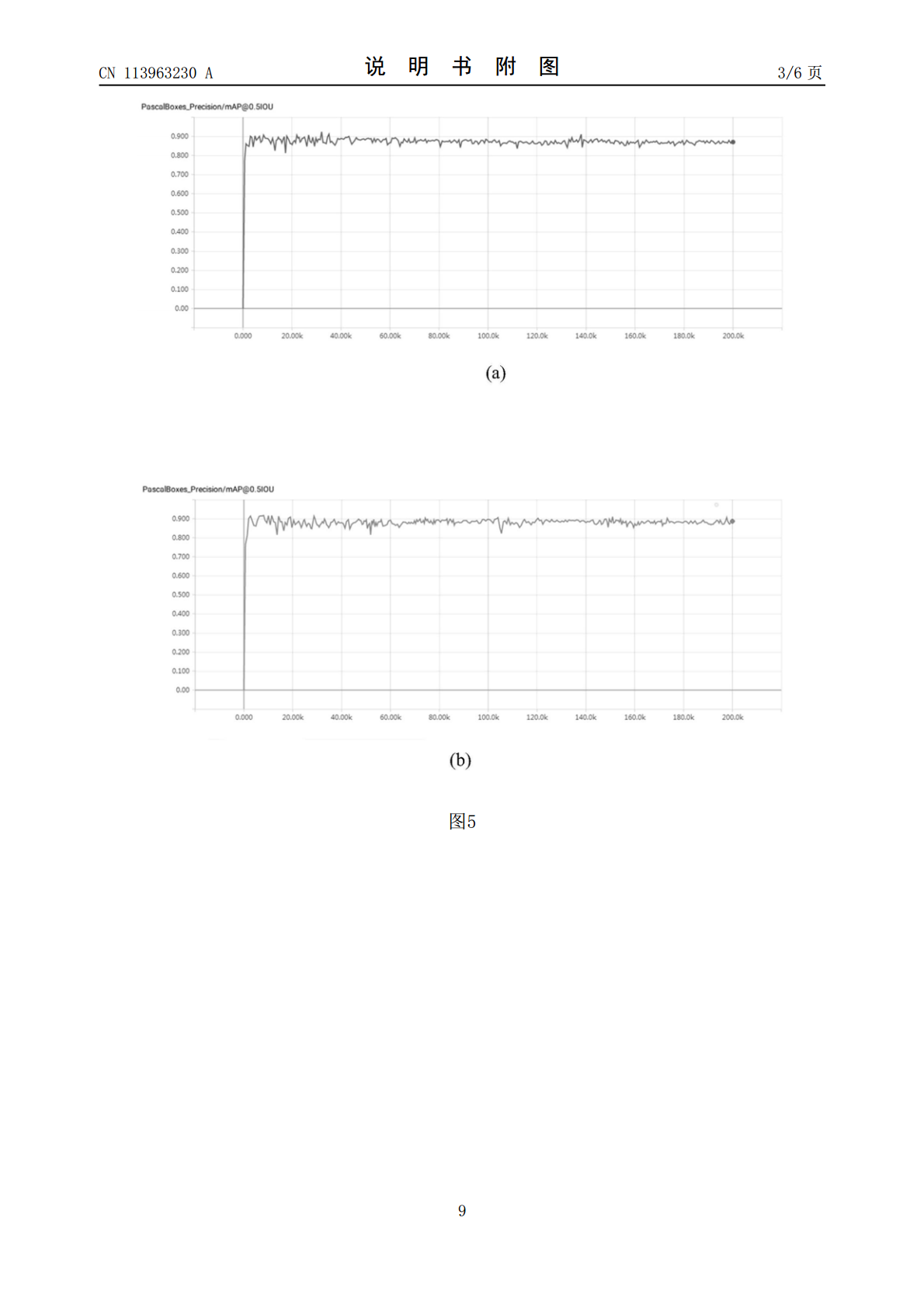
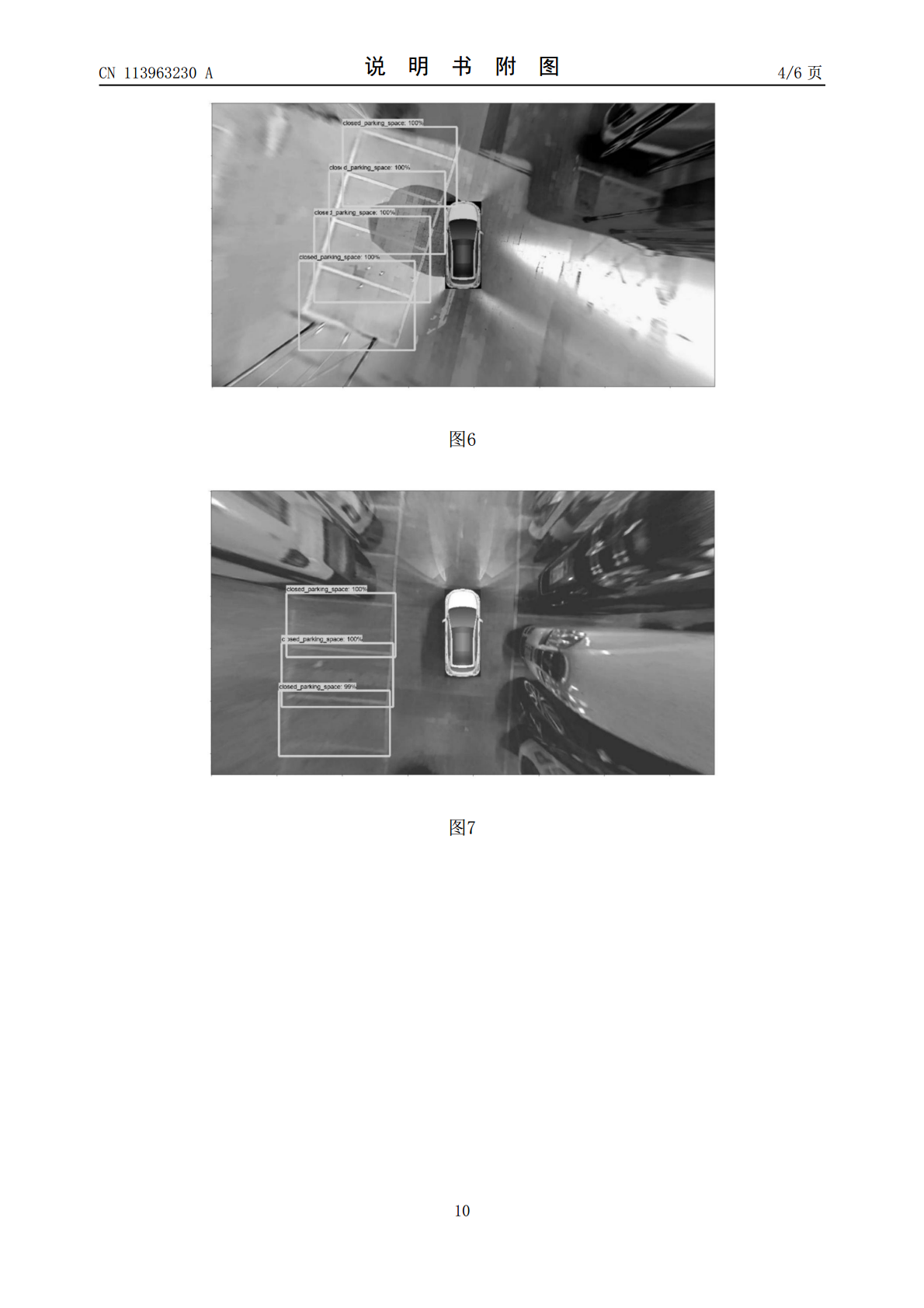
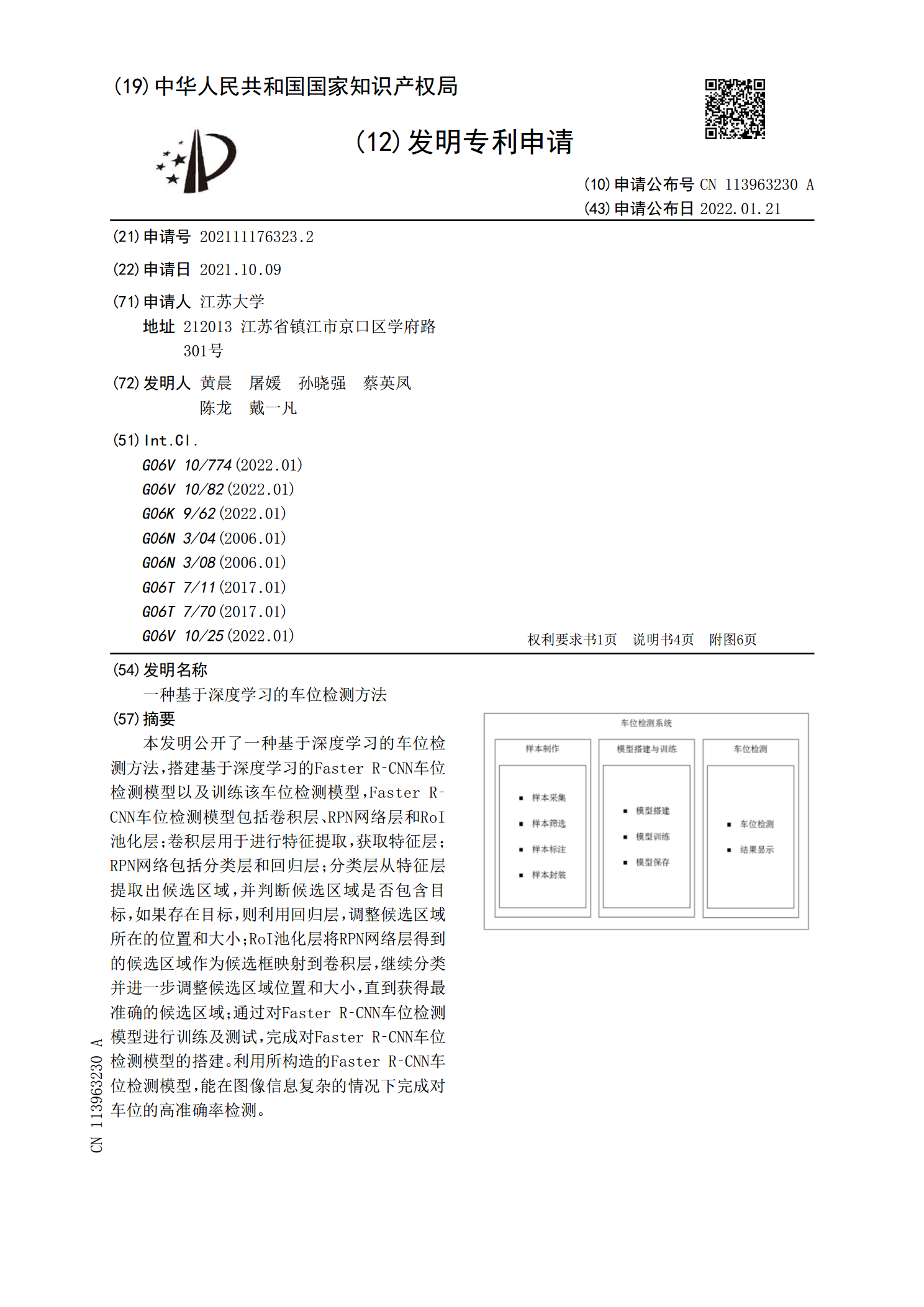
本发明公开了一种基于深度学习的车位检测方法,搭建基于深度学习的FasterR‑CNN车位检测模型以及训练该车位检测模型,FasterR‑CNN车位检测模型包括卷积层、RPN网络层和RoI池化层;卷积层用于进行特征提取,获取特征层;RPN网络包括分类层和回归层;分类层从特征层提取出候选区域,并判断候选区域是否包含目标,如果存在目标,则利用回归层,调整候选区域所在的位置和大小;RoI池化层将RPN网络层得到的候选区域作为候选框映射到卷积层,继续分类并进一步调整候选区域位置和大小,直到获得最准确的候选区域;
一种基于深度学习的车位及障碍物检测方法及其应用.pdf
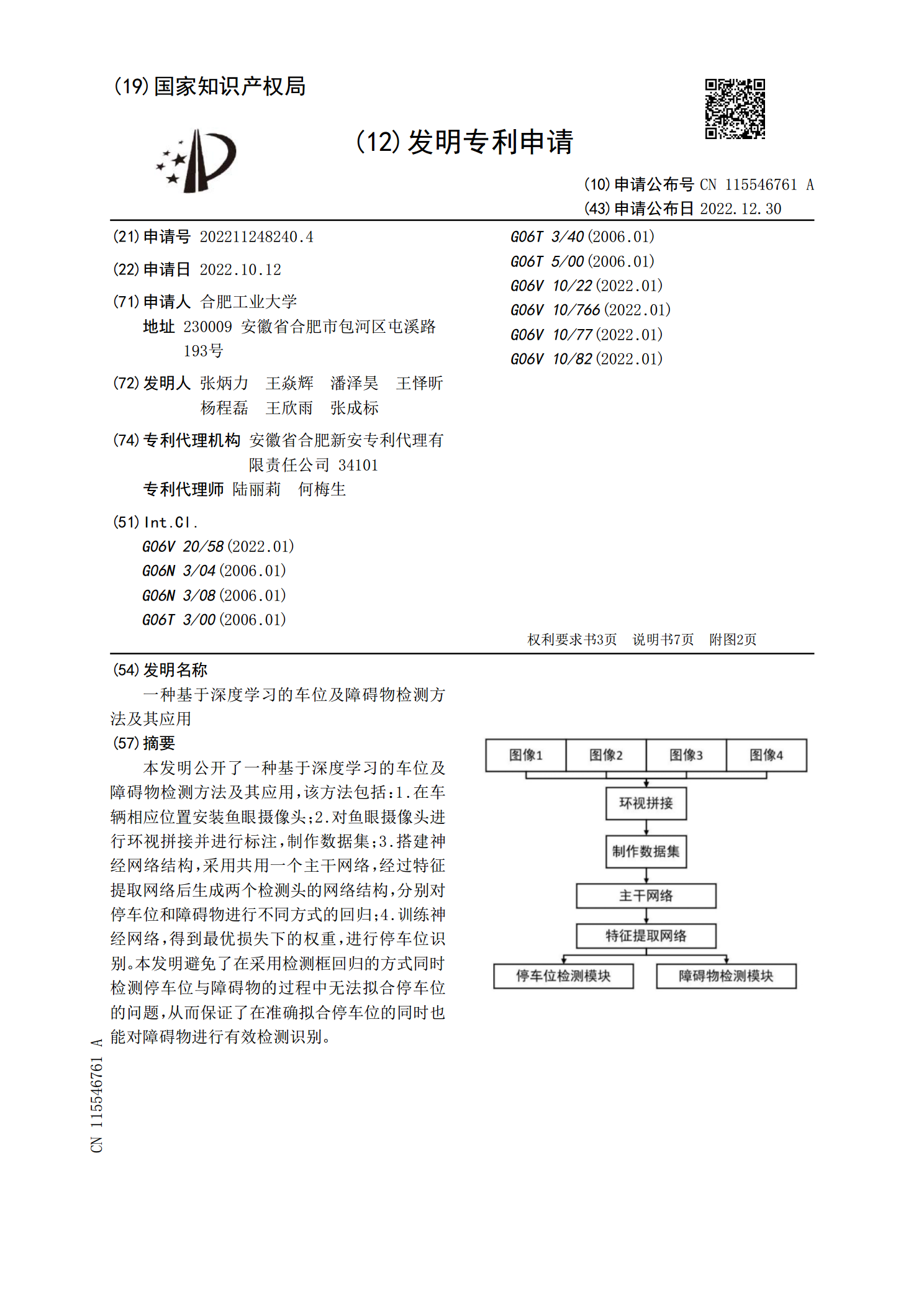
本发明公开了一种基于深度学习的车位及障碍物检测方法及其应用,该方法包括:1.在车辆相应位置安装鱼眼摄像头;2.对鱼眼摄像头进行环视拼接并进行标注,制作数据集;3.搭建神经网络结构,采用共用一个主干网络,经过特征提取网络后生成两个检测头的网络结构,分别对停车位和障碍物进行不同方式的回归;4.训练神经网络,得到最优损失下的权重,进行停车位识别。本发明避免了在采用检测框回归的方式同时检测停车位与障碍物的过程中无法拟合停车位的问题,从而保证了在准确拟合停车位的同时也能对障碍物进行有效检测识别。

一种基于深度学习的工件缺陷检测方法.pdf
本发明涉及一种基于深度学习的工件缺陷检测方法,包括已下步骤:1)图像采集:根据传输带、摄像机、玻璃板等设备搭建工件自动检测装置,通过自动化方式采集待检侧工件图像。2)图像预处理:将采集到的图像通过图像增强、锐化滤波、暗通道去雾等算法进行图片预处理,凸显工件特征,提高检测的准确性与科学性。3)缺陷检测模型:在FasterR?CNN模型基础上,将Resnet50作为主干网络,引入可变形卷积和特征金字塔结构训练缺陷检测模型。并用训练好的模型进行检测,根据缺陷位置和面积大小判断工件是否存在缺陷。4)手柄分类:通过

一种基于深度学习的轮胎缺陷检测方法.pdf
本发明公开了一种基于深度学习的轮胎缺陷检测方法,所述方法包括:获取待检测的轮胎X光图像,输入至训练好的像素级缺陷区域估计网络模型;根据所述像素级缺陷区域估计网络模型的输出结果判断所述待检测的轮胎X光图像是否存在缺陷,并在判断存在缺陷时进一步判断出缺陷类型、缺陷目标框及缺陷边界。应用本发明,能实现轮胎缺陷区域的像素级估计,从而能精确得到缺陷的面积,是轮胎质量判级的重要依据,而且也提高了缺陷检测的精确度。
一种基于深度学习的黑烟车检测方法.pdf
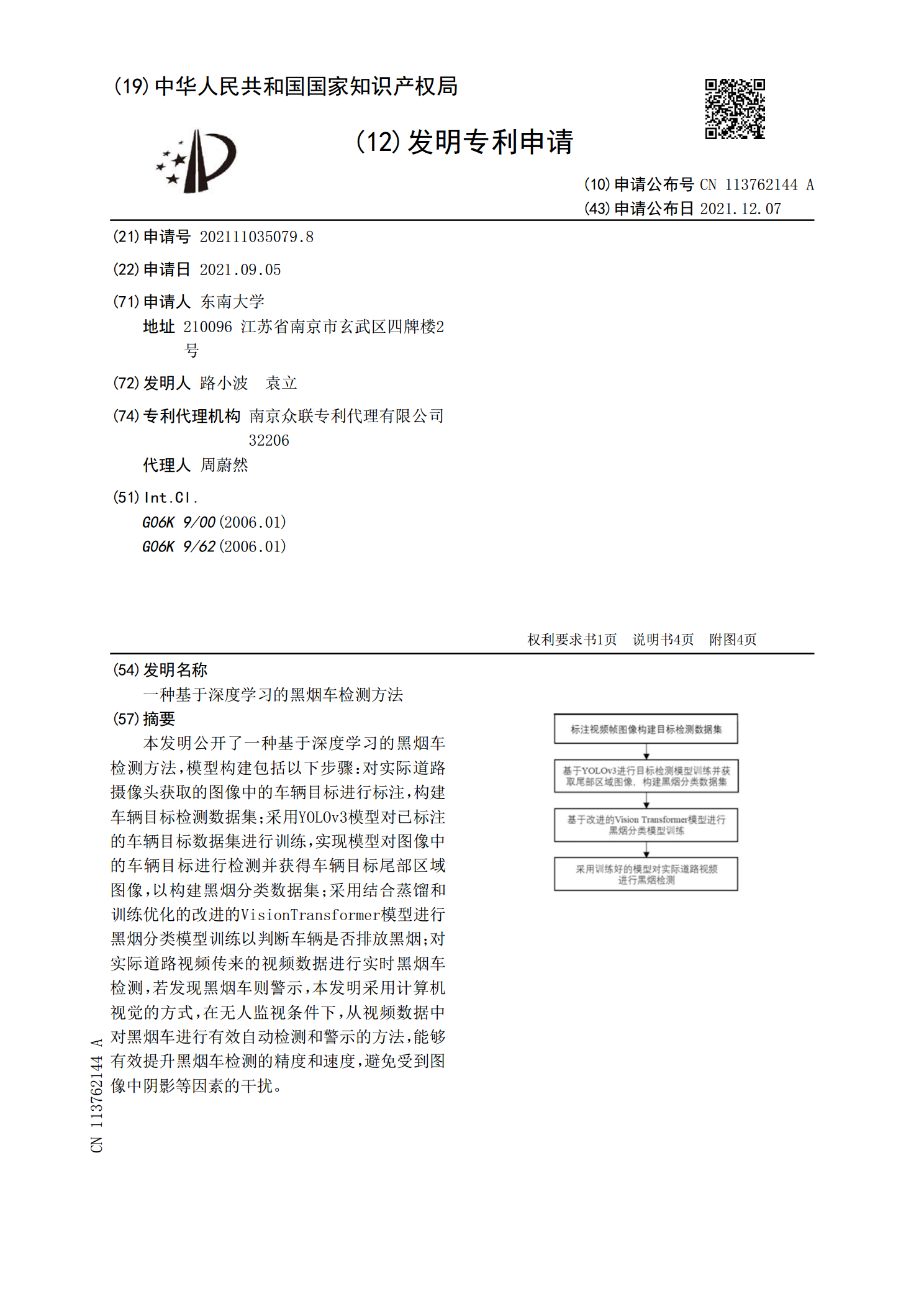
本发明公开了一种基于深度学习的黑烟车检测方法,模型构建包括以下步骤:对实际道路摄像头获取的图像中的车辆目标进行标注,构建车辆目标检测数据集;采用YOLOv3模型对已标注的车辆目标数据集进行训练,实现模型对图像中的车辆目标进行检测并获得车辆目标尾部区域图像,以构建黑烟分类数据集;采用结合蒸馏和训练优化的改进的VisionTransformer模型进行黑烟分类模型训练以判断车辆是否排放黑烟;对实际道路视频传来的视频数据进行实时黑烟车检测,若发现黑烟车则警示,本发明采用计算机视觉的方式,在无人监视条件下,从视频