
一种基于目标检测模型的多类别垃圾场景区分方法.pdf

邻家****mk

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于目标检测模型的多类别垃圾场景区分方法.pdf
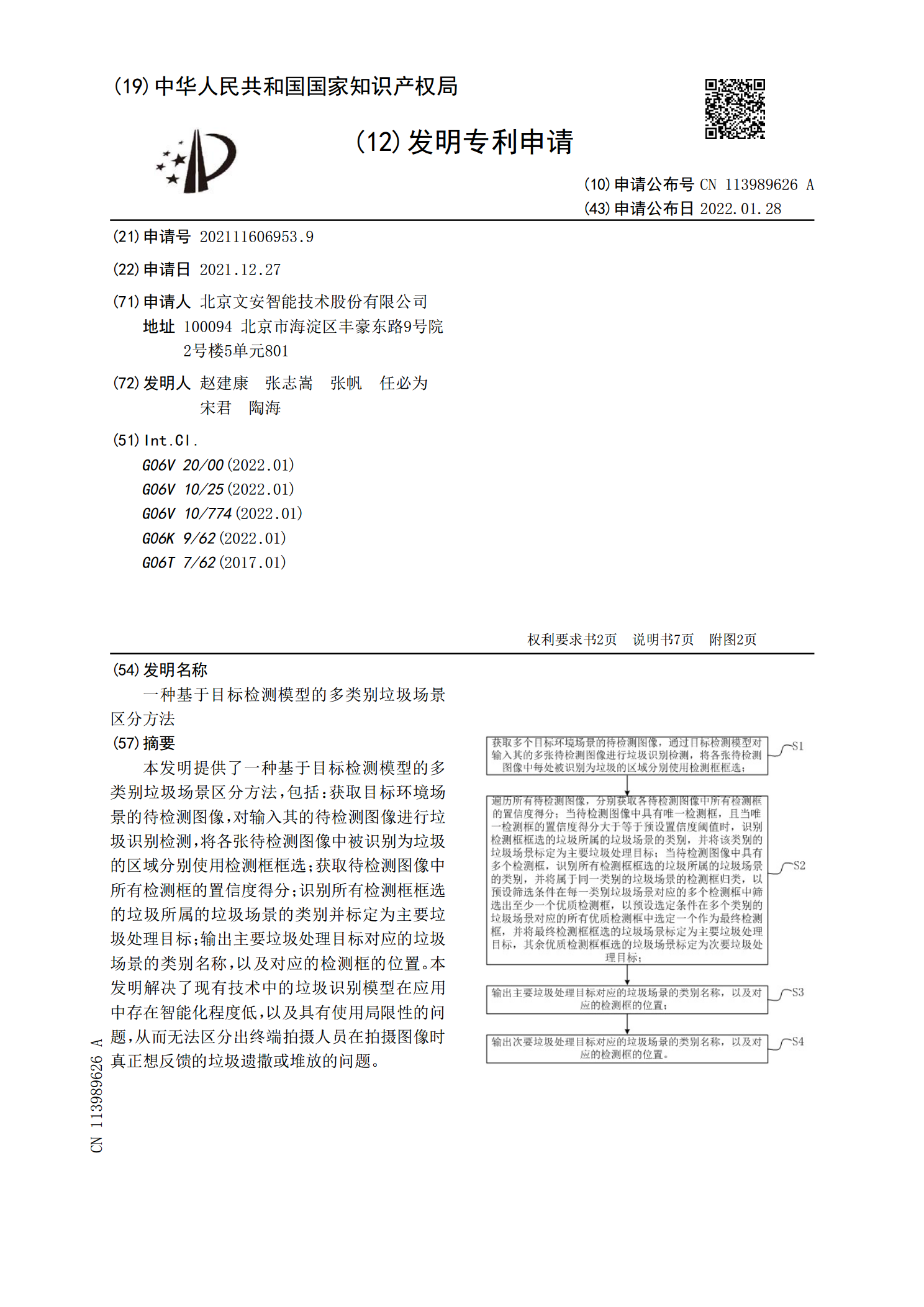
本发明提供了一种基于目标检测模型的多类别垃圾场景区分方法,包括:获取目标环境场景的待检测图像,对输入其的待检测图像进行垃圾识别检测,将各张待检测图像中被识别为垃圾的区域分别使用检测框框选;获取待检测图像中所有检测框的置信度得分;识别所有检测框框选的垃圾所属的垃圾场景的类别并标定为主要垃圾处理目标;输出主要垃圾处理目标对应的垃圾场景的类别名称,以及对应的检测框的位置。本发明解决了现有技术中的垃圾识别模型在应用中存在智能化程度低,以及具有使用局限性的问题,从而无法区分出终端拍摄人员在拍摄图像时真正想反馈的垃圾
一种用于多类别垃圾场景识别的目标检测模型的训练方法.pdf
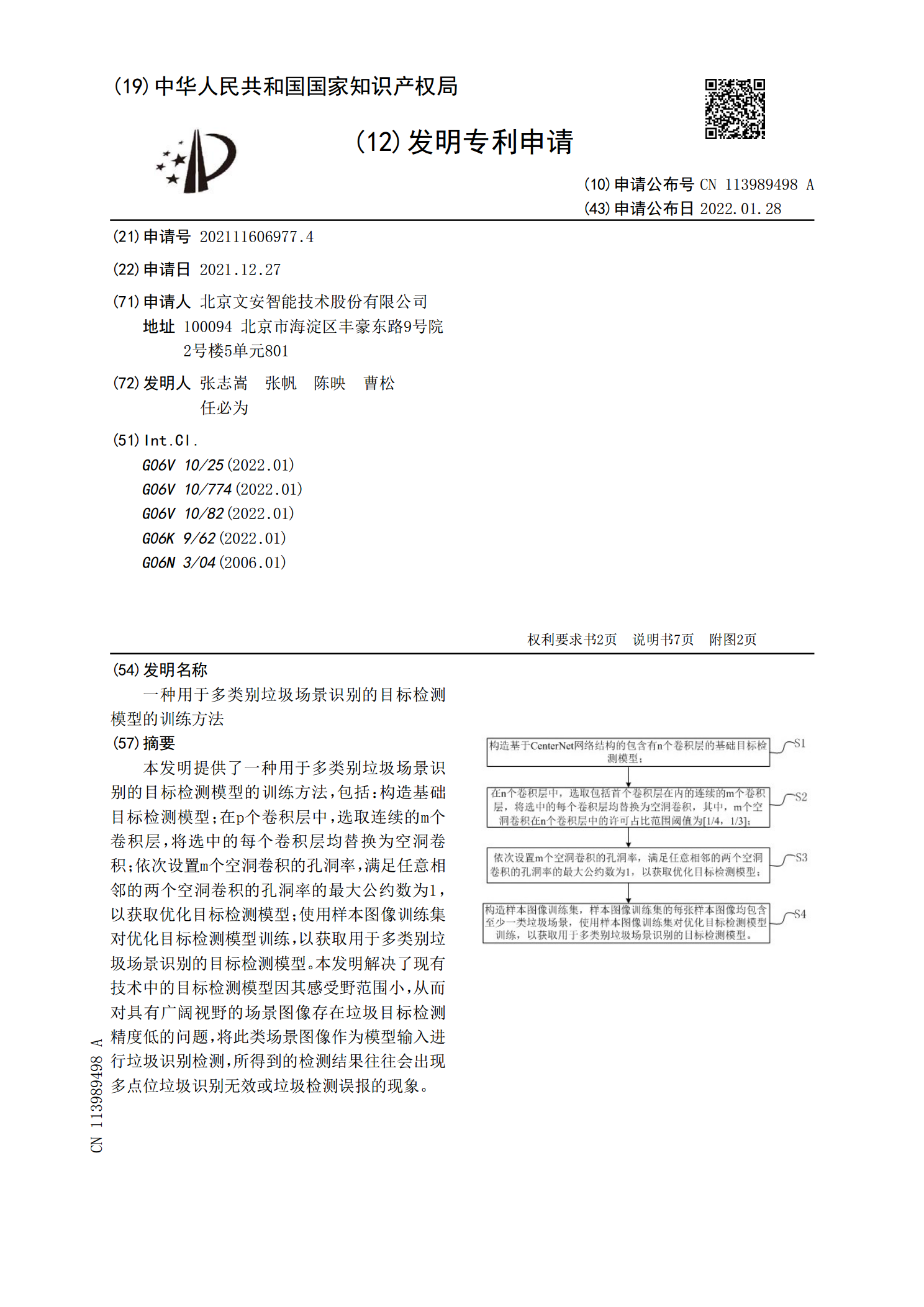
本发明提供了一种用于多类别垃圾场景识别的目标检测模型的训练方法,包括:构造基础目标检测模型;在p个卷积层中,选取连续的m个卷积层,将选中的每个卷积层均替换为空洞卷积;依次设置m个空洞卷积的孔洞率,满足任意相邻的两个空洞卷积的孔洞率的最大公约数为1,以获取优化目标检测模型;使用样本图像训练集对优化目标检测模型训练,以获取用于多类别垃圾场景识别的目标检测模型。本发明解决了现有技术中的目标检测模型因其感受野范围小,从而对具有广阔视野的场景图像存在垃圾目标检测精度低的问题,将此类场景图像作为模型输入进行垃圾识别检
基于改进FCOS的道路场景多类别检测方法及系统.pdf
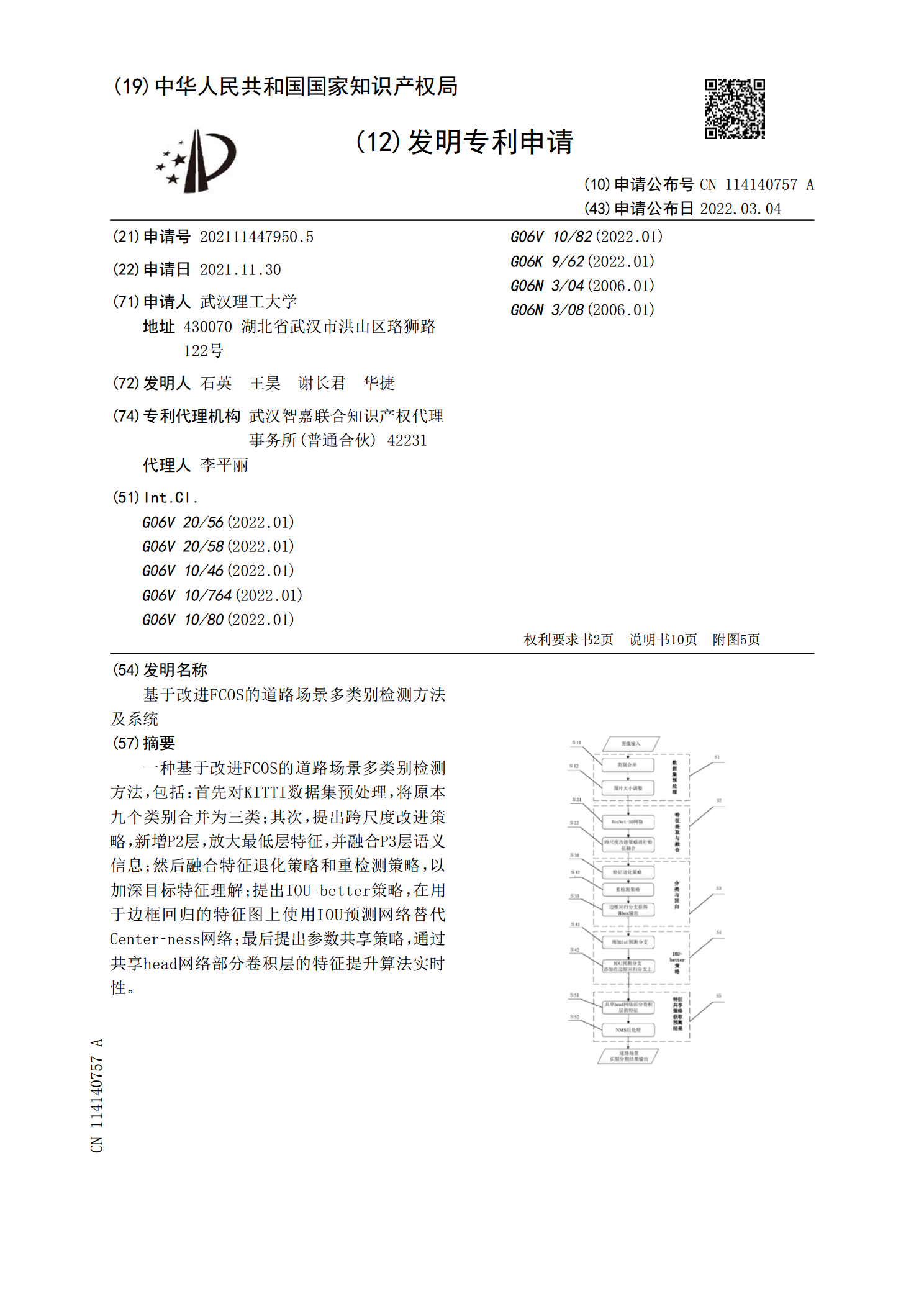
一种基于改进FCOS的道路场景多类别检测方法,包括:首先对KITTI数据集预处理,将原本九个类别合并为三类;其次,提出跨尺度改进策略,新增P2层,放大最低层特征,并融合P3层语义信息;然后融合特征退化策略和重检测策略,以加深目标特征理解;提出IOU‑better策略,在用于边框回归的特征图上使用IOU预测网络替代Center‑ness网络;最后提出参数共享策略,通过共享head网络部分卷积层的特征提升算法实时性。
一种基于高斯混合模型与深度学习的多类别车辆检测方法.pdf
本发明涉及一种基于高斯混合模型与深度学习的多类别车辆检测方法。本发明同时检测多种类别的车辆,将传统算法与深度学习模型进行了结合,具体包括A通过高清摄像头获得道路高清监控视频,并将其传递给后台服务器;B通过高斯混合模型背景差分法进行前景提取,同时进行轮廓检测,获得待检测的ROI区域。C将ROI区域传入到改进后的SqueezeNet网络进行类别检测,并显示结果。D.将每一类别的车辆进行汇总,同时计算视频检测的检测速度。E.将每一帧的视频检测结果汇成视频流显示,同时进行备份供用户备份检查。本发明使用少量预训练样

一种多类别目标检测的方法及系统.pdf
本申请公开了一种多类别目标检测的方法,包括:搜索待检测图像中第一类目标及第二类目标,并获得定位框;分类定位框内的图像,并获得背景概率及目标概率;过滤分类不确定的所述定位框内的图像,并获得检测结果。与现有技术相比,本申请具有如下有益效果:由于采用轻量级卷积神经网络,图像检测功能无须部署到云端,而是直接运行在摄像头内部的嵌入式硬件上,从而避免了网络传输延迟,同时降低了用户购买成本。另外,通过将人形宠物定位与分类在时序上分开处理,并且采用对比过滤机制,最终较大程度上降低了误检。