
一种双目线阵相机位置调节以及标定的方法.pdf

一只****呀9

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双目线阵相机位置调节以及标定的方法.pdf
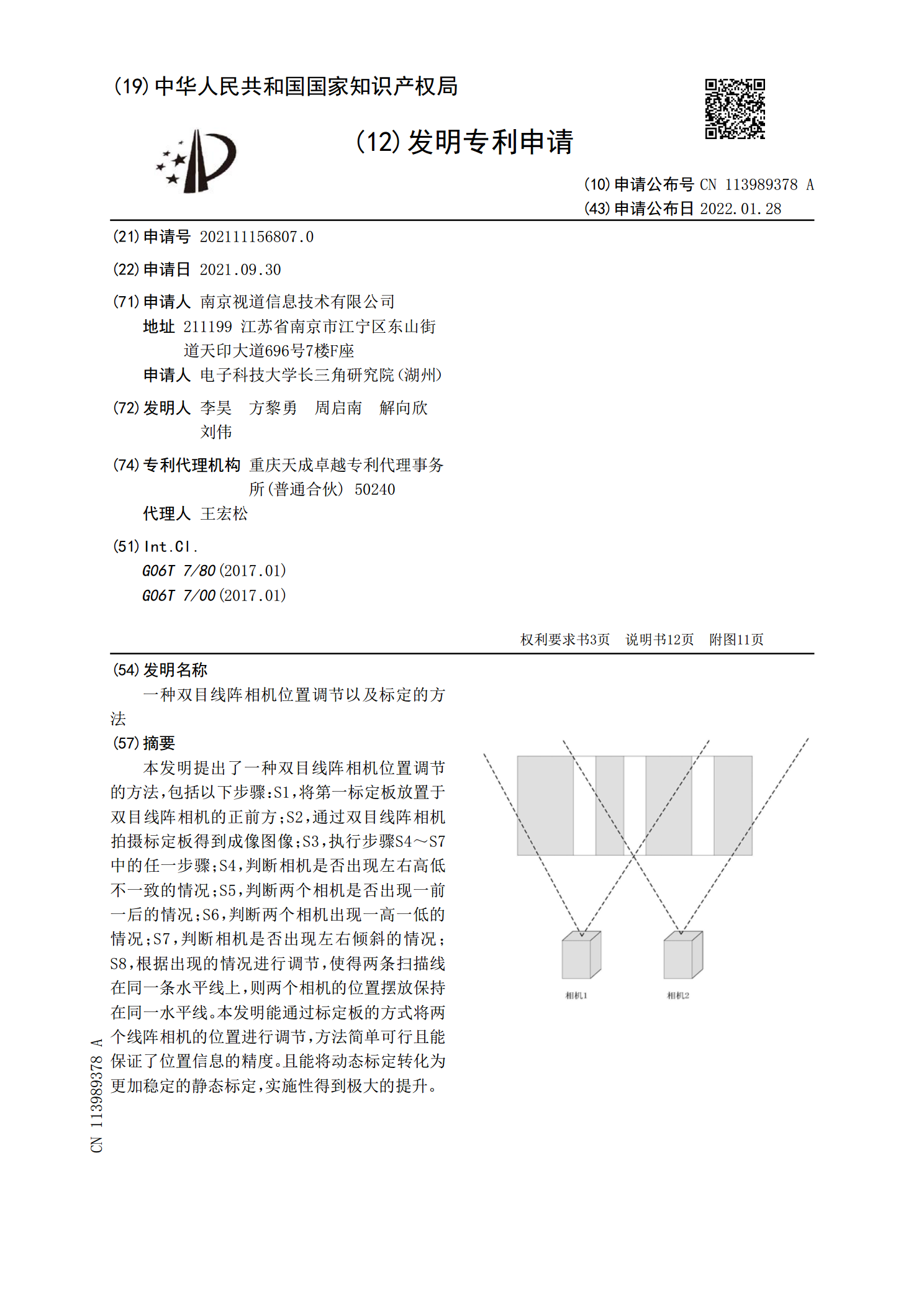
本发明提出了一种双目线阵相机位置调节的方法,包括以下步骤:S1,将第一标定板放置于双目线阵相机的正前方;S2,通过双目线阵相机拍摄标定板得到成像图像;S3,执行步骤S4~S7中的任一步骤;S4,判断相机是否出现左右高低不一致的情况;S5,判断两个相机是否出现一前一后的情况;S6,判断两个相机出现一高一低的情况;S7,判断相机是否出现左右倾斜的情况;S8,根据出现的情况进行调节,使得两条扫描线在同一条水平线上,则两个相机的位置摆放保持在同一水平线。本发明能通过标定板的方式将两个线阵相机的位置进行调节,方法简
线阵相机标定方法.pdf
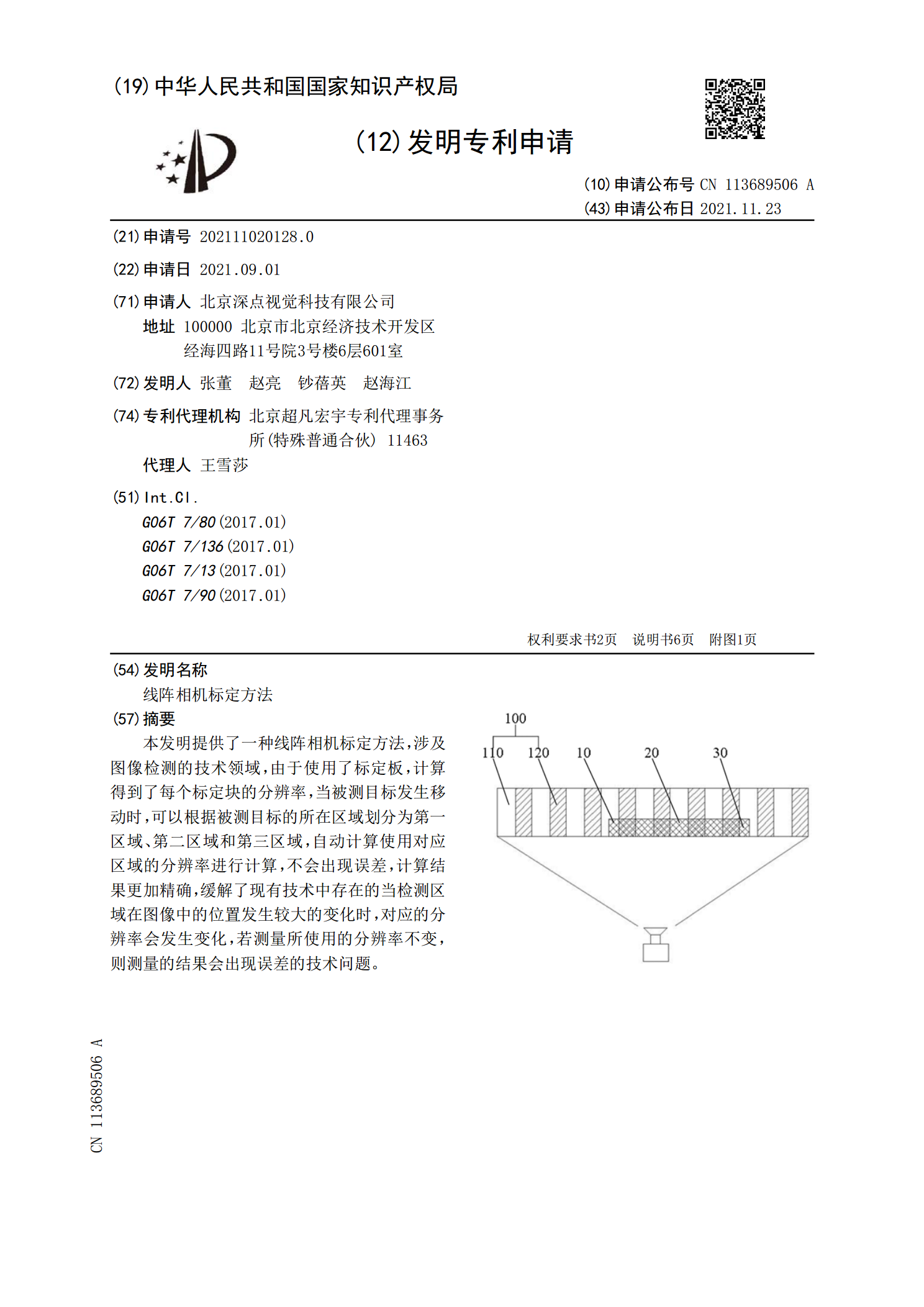
本发明提供了一种线阵相机标定方法,涉及图像检测的技术领域,由于使用了标定板,计算得到了每个标定块的分辨率,当被测目标发生移动时,可以根据被测目标的所在区域划分为第一区域、第二区域和第三区域,自动计算使用对应区域的分辨率进行计算,不会出现误差,计算结果更加精确,缓解了现有技术中存在的当检测区域在图像中的位置发生较大的变化时,对应的分辨率会发生变化,若测量所使用的分辨率不变,则测量的结果会出现误差的技术问题。

双目相机的立体标定方法、装置、系统及双目相机.pdf
本申请实施例公开了一种双目相机的立体标定方法、装置、系统及双目相机,属于计算机视觉技术领域。本方案中标定装置通过反向补光、漫反射面反射光线和热量,且保证散热,使标定板上的光线和热量均匀稳定,这样拍摄得到的可见光图像和热红外图像清晰。本方案中的立体标定方法,先将两台相机的成像规格统一,这样后续的立体标定能够准确有效。另外,在本方案中还对沿光轴方向的平移分量作减小处理,来确定两台相机各自的旋转量,后续基于确定的旋转量旋转校正图像后,能够保留更多的图像,保证了图像的可用性,也即保证了立体标定的可靠性。在将该立体
一种自适应的双目相机标定方法.pdf
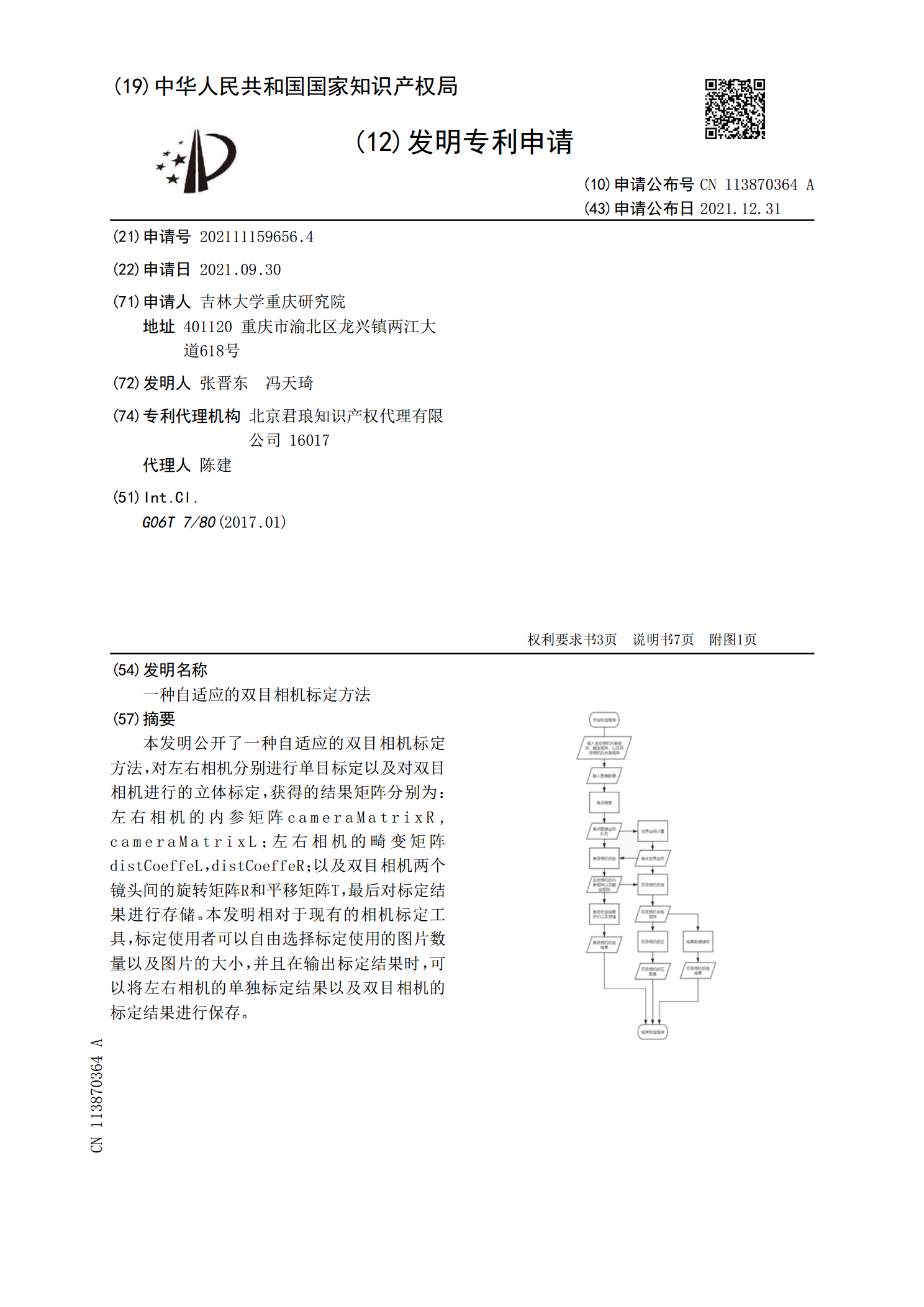
本发明公开了一种自适应的双目相机标定方法,对左右相机分别进行单目标定以及对双目相机进行的立体标定,获得的结果矩阵分别为:左右相机的内参矩阵cameraMatrixR,cameraMatrixL;左右相机的畸变矩阵distCoeffeL,distCoeffeR;以及双目相机两个镜头间的旋转矩阵R和平移矩阵T,最后对标定结果进行存储。本发明相对于现有的相机标定工具,标定使用者可以自由选择标定使用的图片数量以及图片的大小,并且在输出标定结果时,可以将左右相机的单独标定结果以及双目相机的标定结果进行保存。
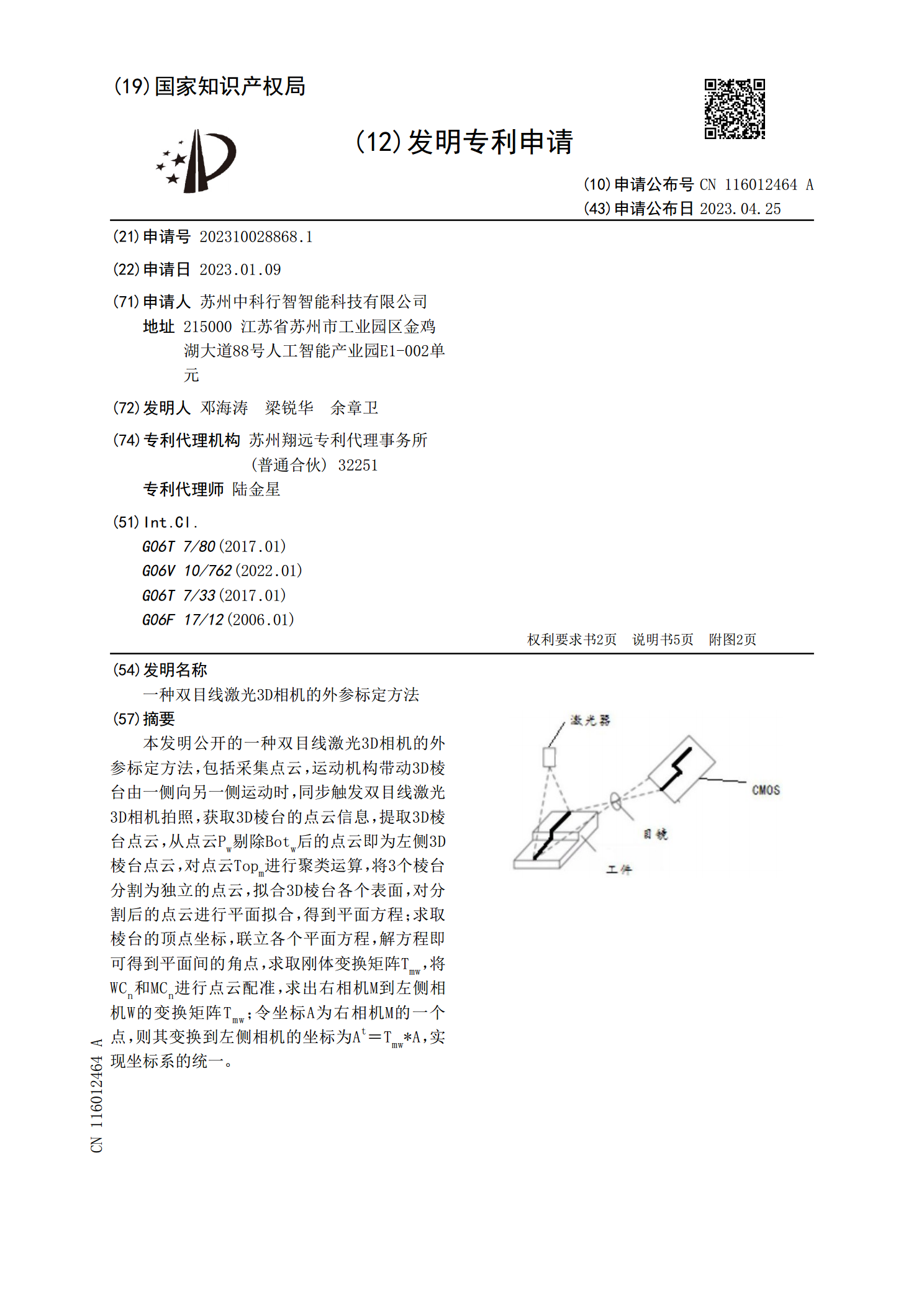
一种双目线激光3D相机的外参标定方法.pdf
本发明公开的一种双目线激光3D相机的外参标定方法,包括采集点云,运动机构带动3D棱台由一侧向另一侧运动时,同步触发双目线激光3D相机拍照,获取3D棱台的点云信息,提取3D棱台点云,从点云P