
一种基于DMP的下肢外骨骼上楼梯控制方法.pdf

fu****级甜

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
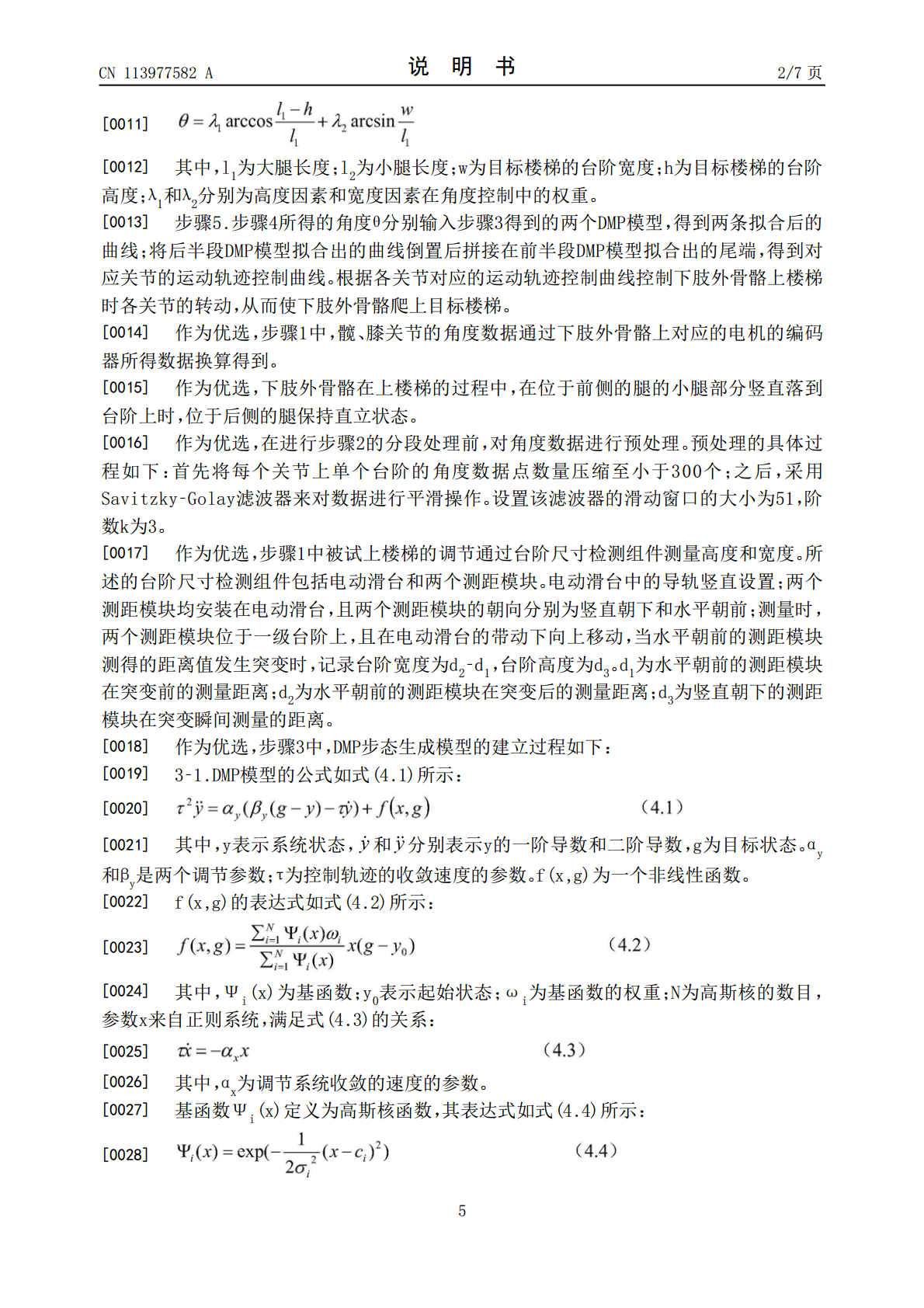
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于DMP的下肢外骨骼上楼梯控制方法.pdf
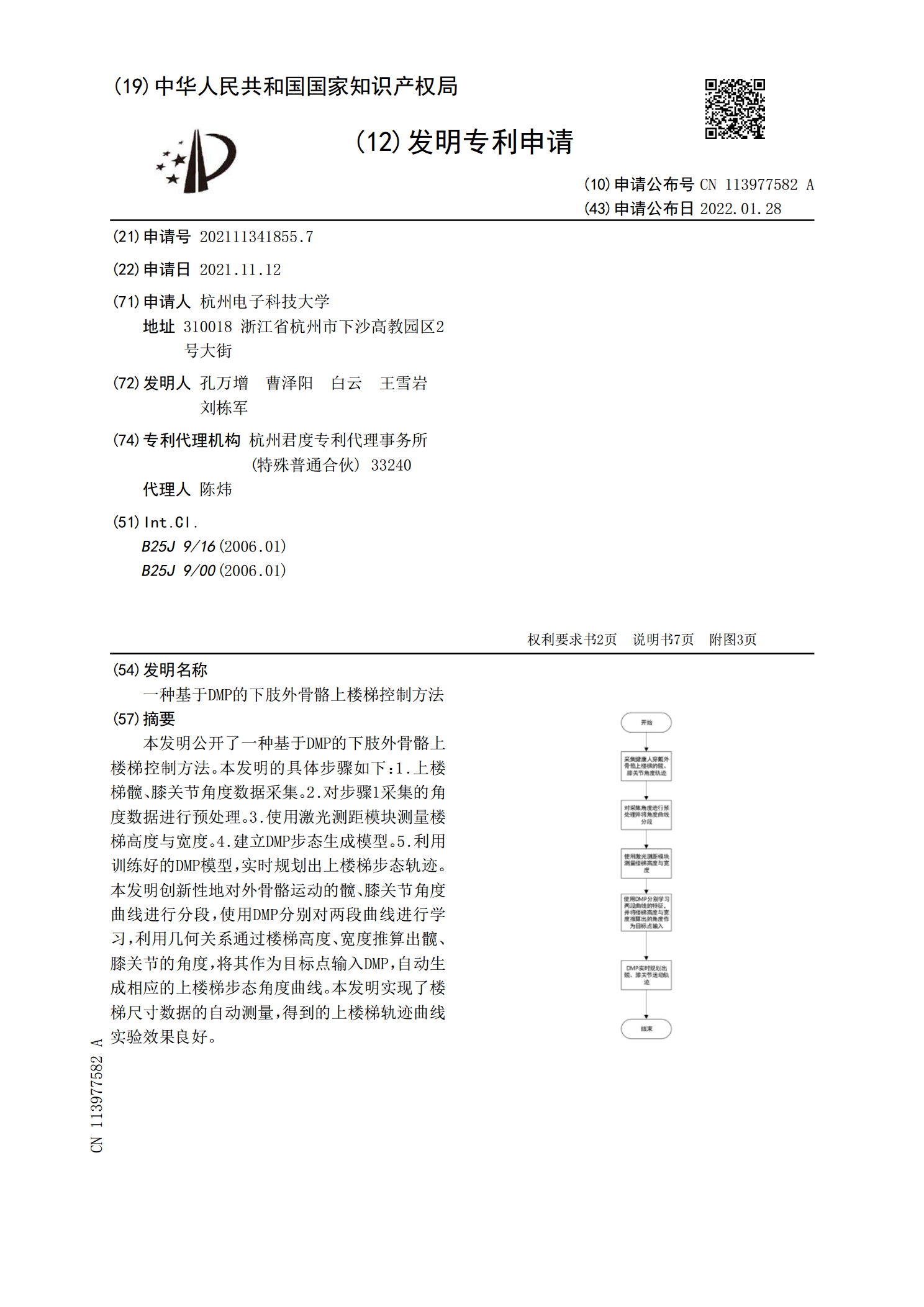
本发明公开了一种基于DMP的下肢外骨骼上楼梯控制方法。本发明的具体步骤如下:1.上楼梯髋、膝关节角度数据采集。2.对步骤1采集的角度数据进行预处理。3.使用激光测距模块测量楼梯高度与宽度。4.建立DMP步态生成模型。5.利用训练好的DMP模型,实时规划出上楼梯步态轨迹。本发明创新性地对外骨骼运动的髋、膝关节角度曲线进行分段,使用DMP分别对两段曲线进行学习,利用几何关系通过楼梯高度、宽度推算出髋、膝关节的角度,将其作为目标点输入DMP,自动生成相应的上楼梯步态角度曲线。本发明实现了楼梯尺寸数据的自动测量,
一种基于下肢外骨骼机器人的按需辅助控制方法.pdf
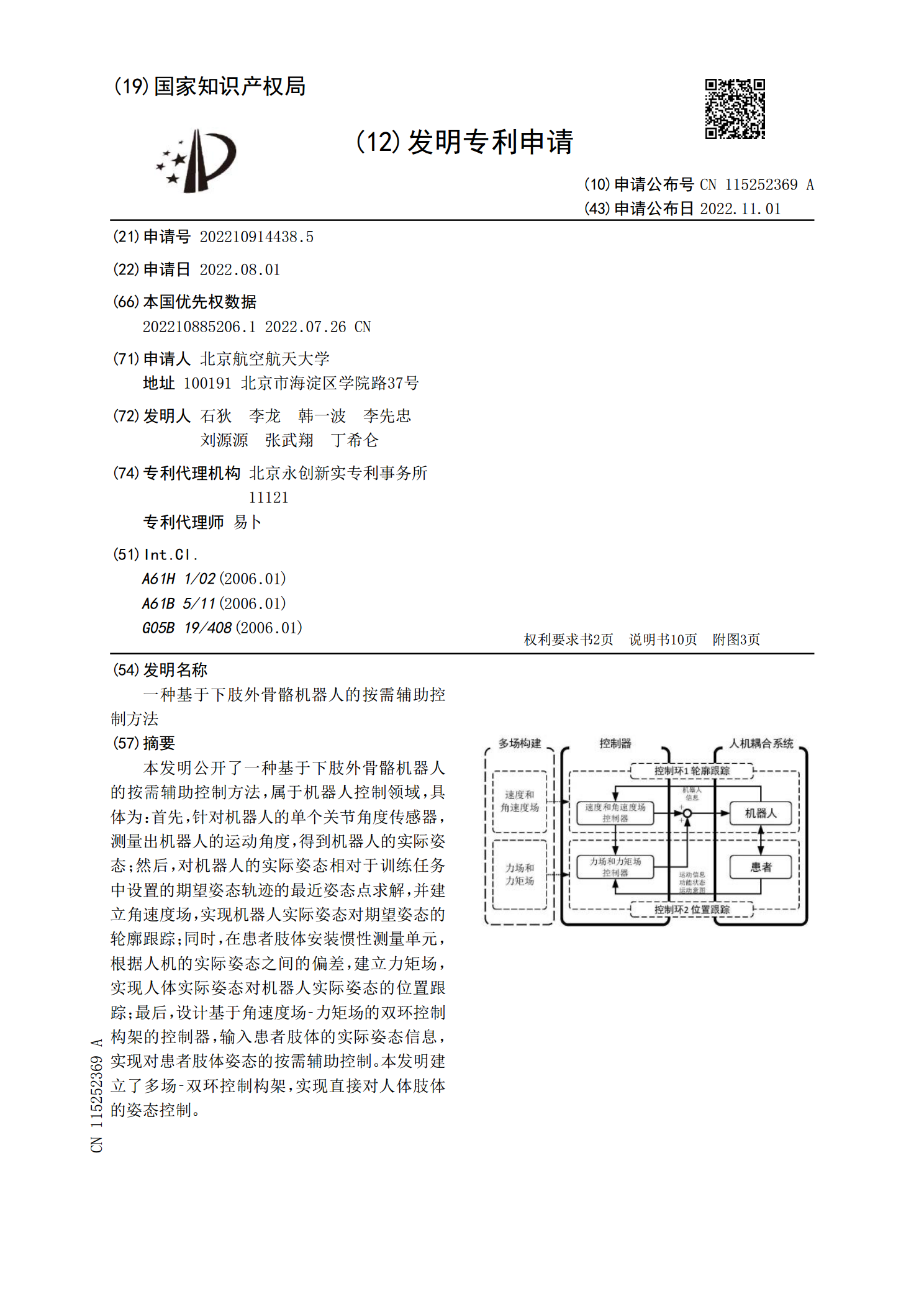
本发明公开了一种基于下肢外骨骼机器人的按需辅助控制方法,属于机器人控制领域,具体为:首先,针对机器人的单个关节角度传感器,测量出机器人的运动角度,得到机器人的实际姿态;然后,对机器人的实际姿态相对于训练任务中设置的期望姿态轨迹的最近姿态点求解,并建立角速度场,实现机器人实际姿态对期望姿态的轮廓跟踪;同时,在患者肢体安装惯性测量单元,根据人机的实际姿态之间的偏差,建立力矩场,实现人体实际姿态对机器人实际姿态的位置跟踪;最后,设计基于角速度场‑力矩场的双环控制构架的控制器,输入患者肢体的实际姿态信息,实现对患

一种基于脑机接口的猴子下肢外骨骼系统及其控制方法.pdf
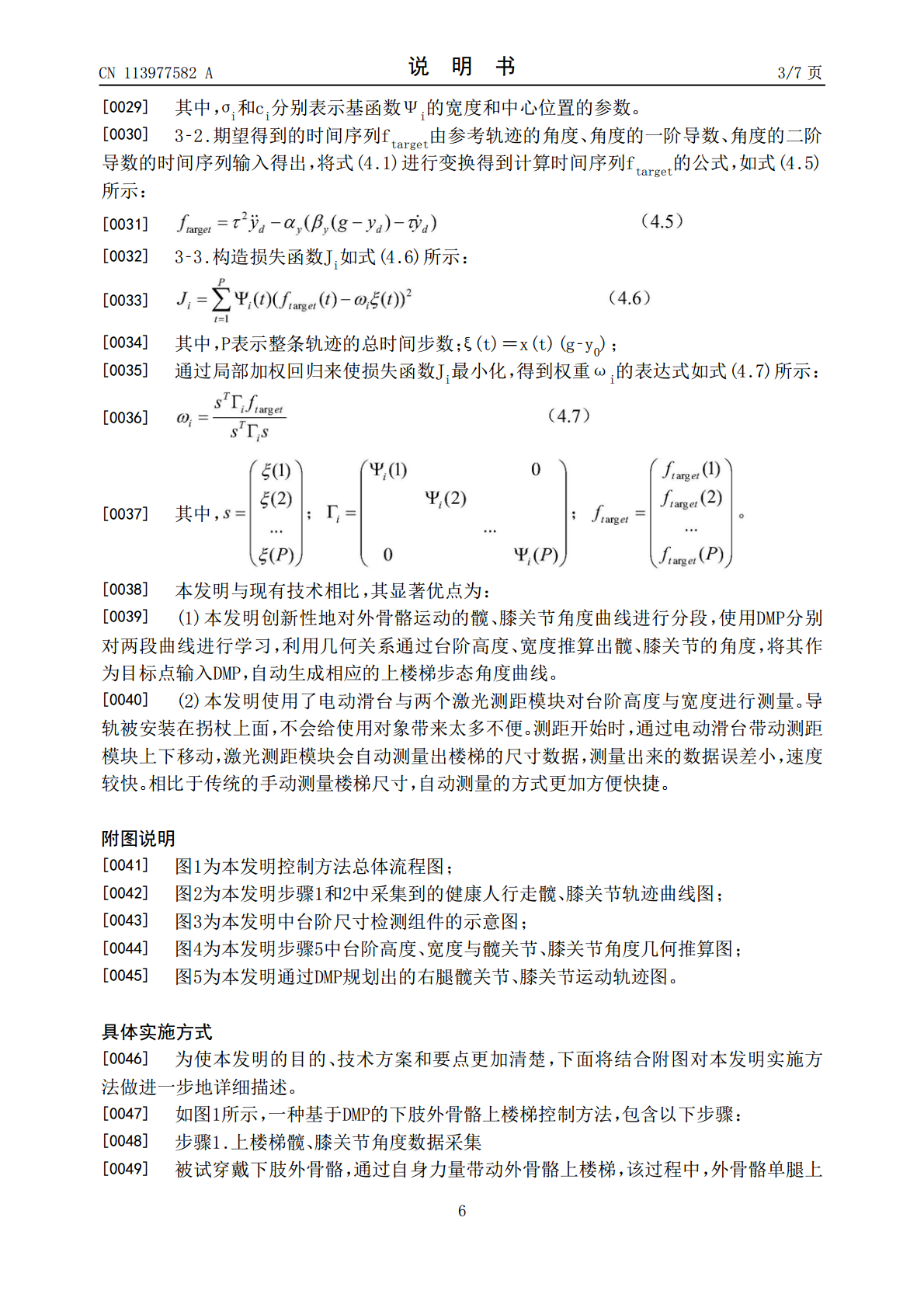
本申请提供一种基于脑机接口的猴子下肢外骨骼系统,包括脑机接口设备和外骨骼设备;外骨骼设备包括背板结构、相对设置在背板结构左右两侧的腰部调节结构和与腰部调节结构连接的下肢驱动结构;腰部调节结构包括调节两个下肢驱动结构间距的第一调节组件和调节下肢驱动结构与背板结构间距的第二调节组件;下肢驱动结构包括电机组件设置在电机组件输出端的传感器组件;背板结构包括控制电机组件转动的驱动器;脑机接口设备与传感器组件和驱动器无线连接;驱动器与电机组件电连接。通过将腰部调节结构设置在背板结构与下肢驱动结构之间,便于对两个下肢驱
下肢外骨骼控制方法及装置.pdf
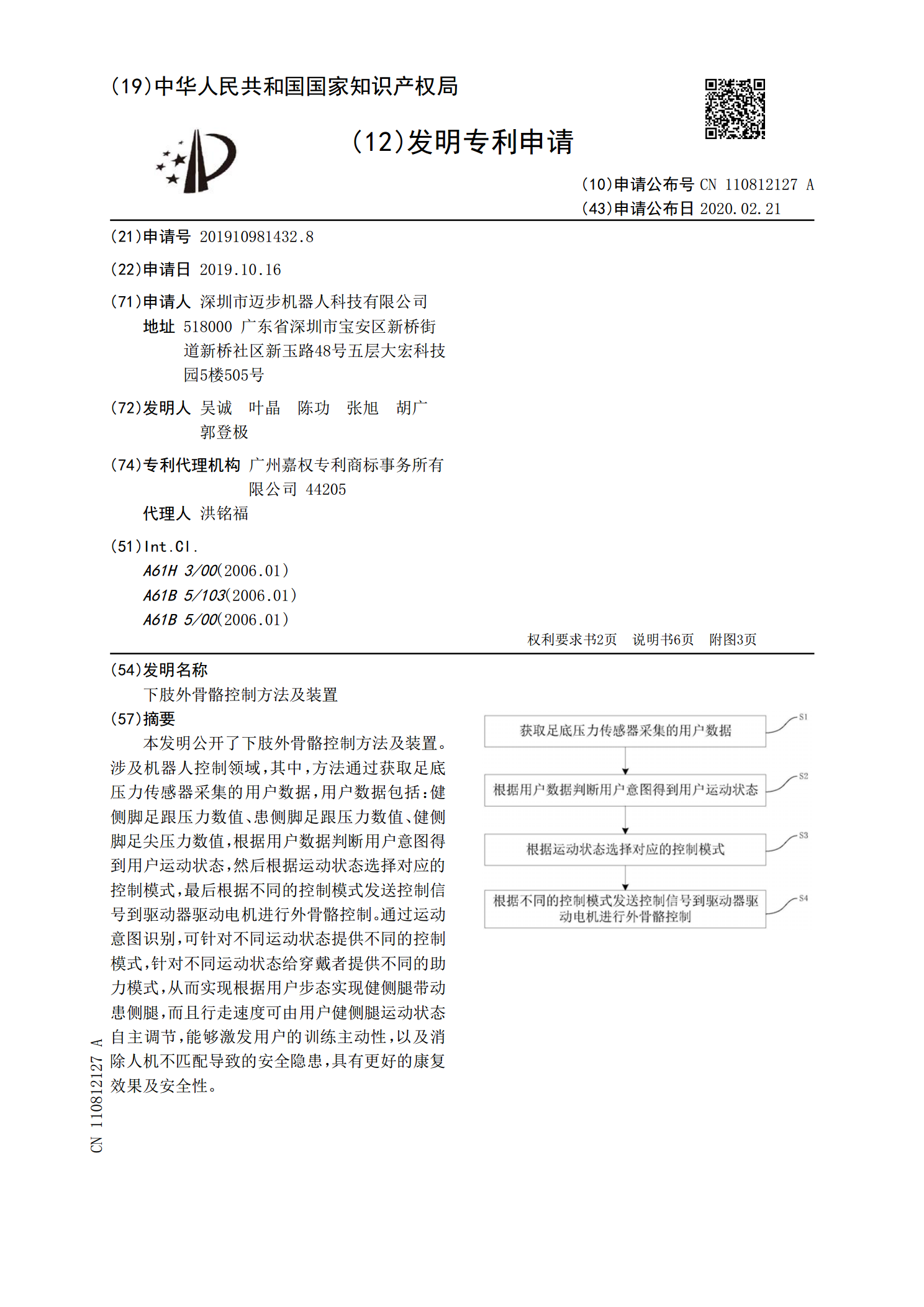
本发明公开了下肢外骨骼控制方法及装置。涉及机器人控制领域,其中,方法通过获取足底压力传感器采集的用户数据,用户数据包括:健侧脚足跟压力数值、患侧脚足跟压力数值、健侧脚足尖压力数值,根据用户数据判断用户意图得到用户运动状态,然后根据运动状态选择对应的控制模式,最后根据不同的控制模式发送控制信号到驱动器驱动电机进行外骨骼控制。通过运动意图识别,可针对不同运动状态提供不同的控制模式,针对不同运动状态给穿戴者提供不同的助力模式,从而实现根据用户步态实现健侧腿带动患侧腿,而且行走速度可由用户健侧腿运动状态自主调节,

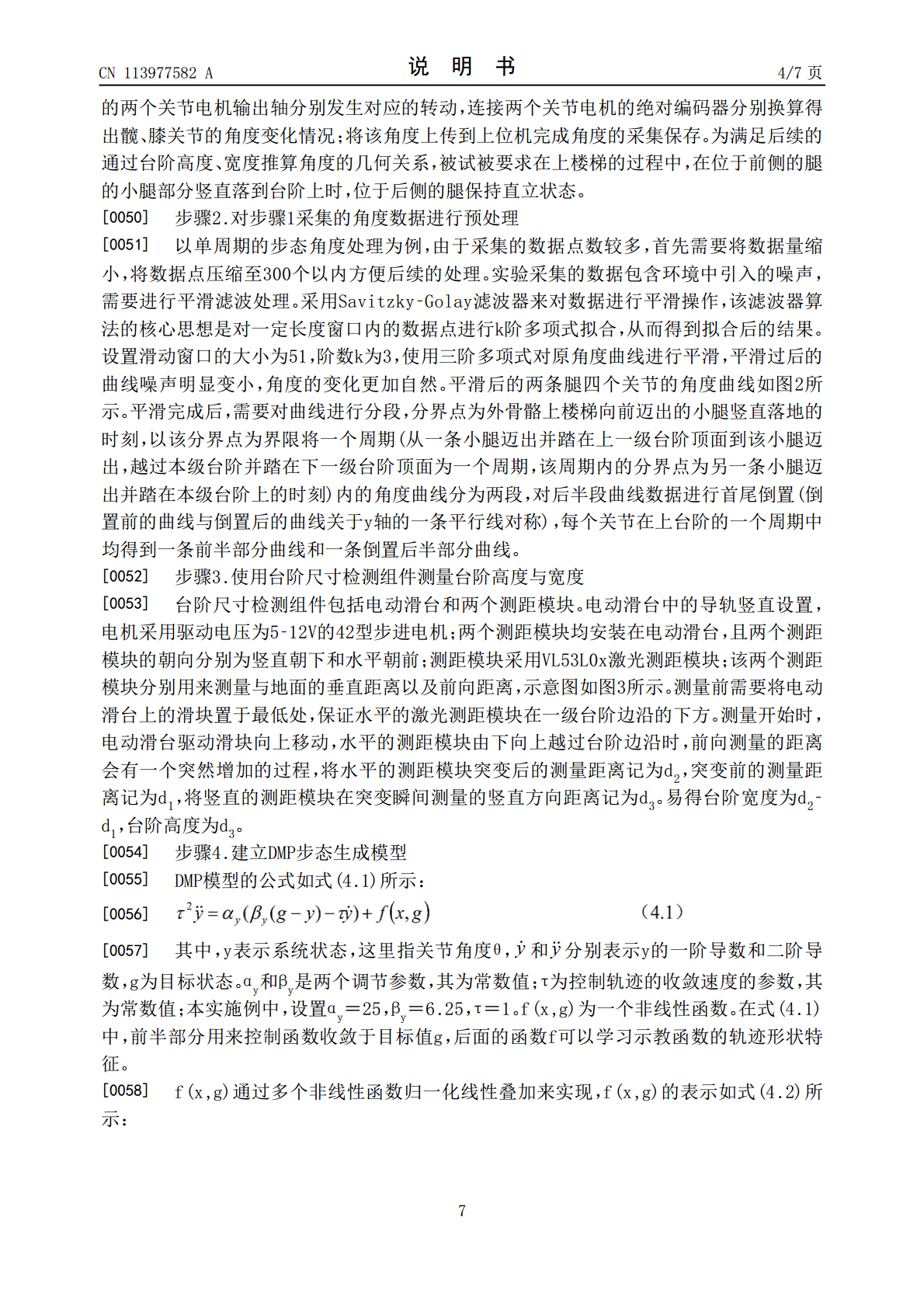
一种下肢外骨骼助力装置及控制方法.pdf
本发明涉及一种助力装置,特别涉及一种下肢外骨骼助力装置,包括大腿连接杆、小腿连接杆、腰护垫、髋关节和膝关节;其中,大腿连杆和小腿连杆通过膝关节连接,腰护垫和大腿连杆通过髋关节连接;所述髋关节、膝关节的关节部分包括关节箱体、伺服电机、谐波齿轮、主动蜗轮和从动蜗轮,伺服电机连接于关节箱体上,所述主动蜗轮和谐波齿轮与伺服电机同轴连接,从动齿轮和主动蜗轮啮合,髋关节的从动齿轮和大腿连杆连接、膝关节的从动齿轮与小腿连杆连接;本发明可以为行动不便的穿戴者提供行走的动力,以达到省力的目的,并且本发明具有较高的可靠性和稳