
一种基于多目标优化的无人船路径优化方法和系统.pdf

桂香****盟主

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多目标优化的无人船路径优化方法和系统.pdf
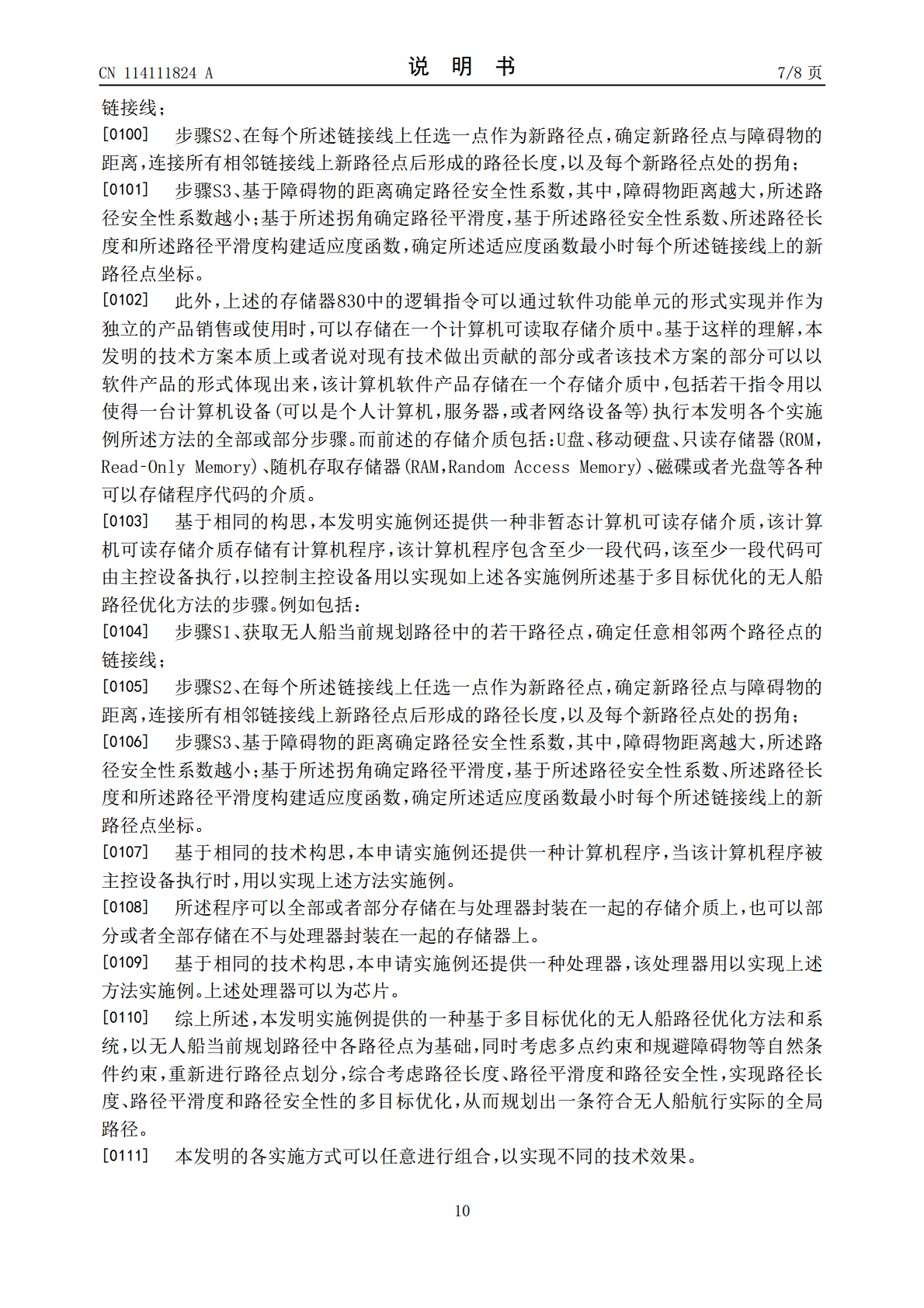
本发明实施例提供一种基于多目标优化的无人船路径优化方法和系统,以无人船当前规划路径中各路径点为基础,同时考虑多点约束和规避障碍物等自然条件约束,重新进行路径点划分,综合考虑路径长度、路径平滑度和路径安全性,实现路径长度、路径平滑度和路径安全性的多目标优化,从而规划出一条符合无人船航行实际的全局路径。
一种基于混合粒子群算法的无人船路径优化方法和系统.pdf
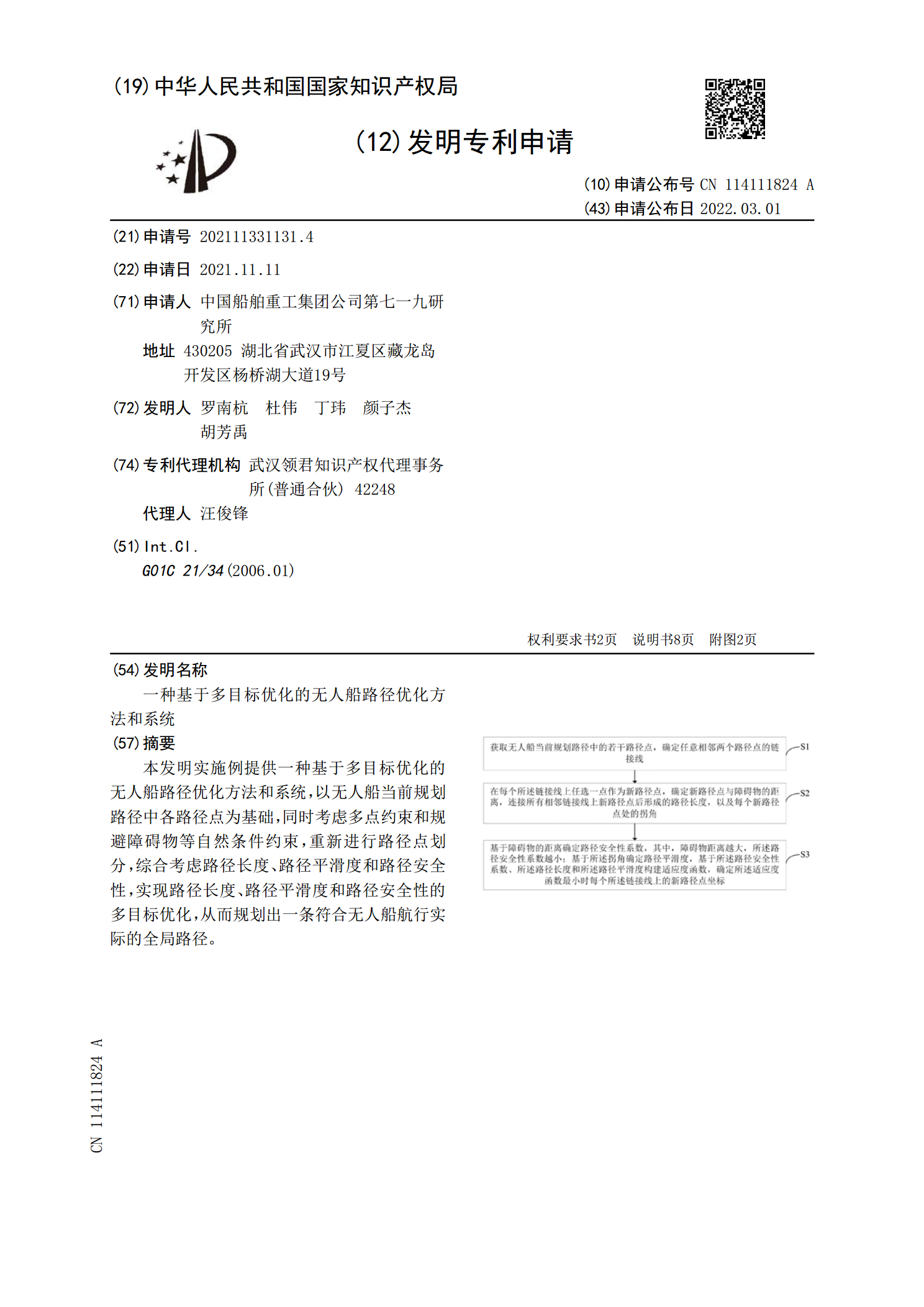
本发明实施例提供一种基于混合粒子群算法的无人船路径优化方法和系统,以无人船当前规划路径中各路径点为基础,同时考虑多点约束和规避障碍物等自然条件约束,重新进行路径点划分,综合考虑路径长度、路径平滑度和路径安全性,实现路径长度、路径平滑度和路径安全性的多目标优化,从而规划出一条符合无人船航行实际的全局路径。
一种基于路径优化的多目标辐射侦察方法.pdf
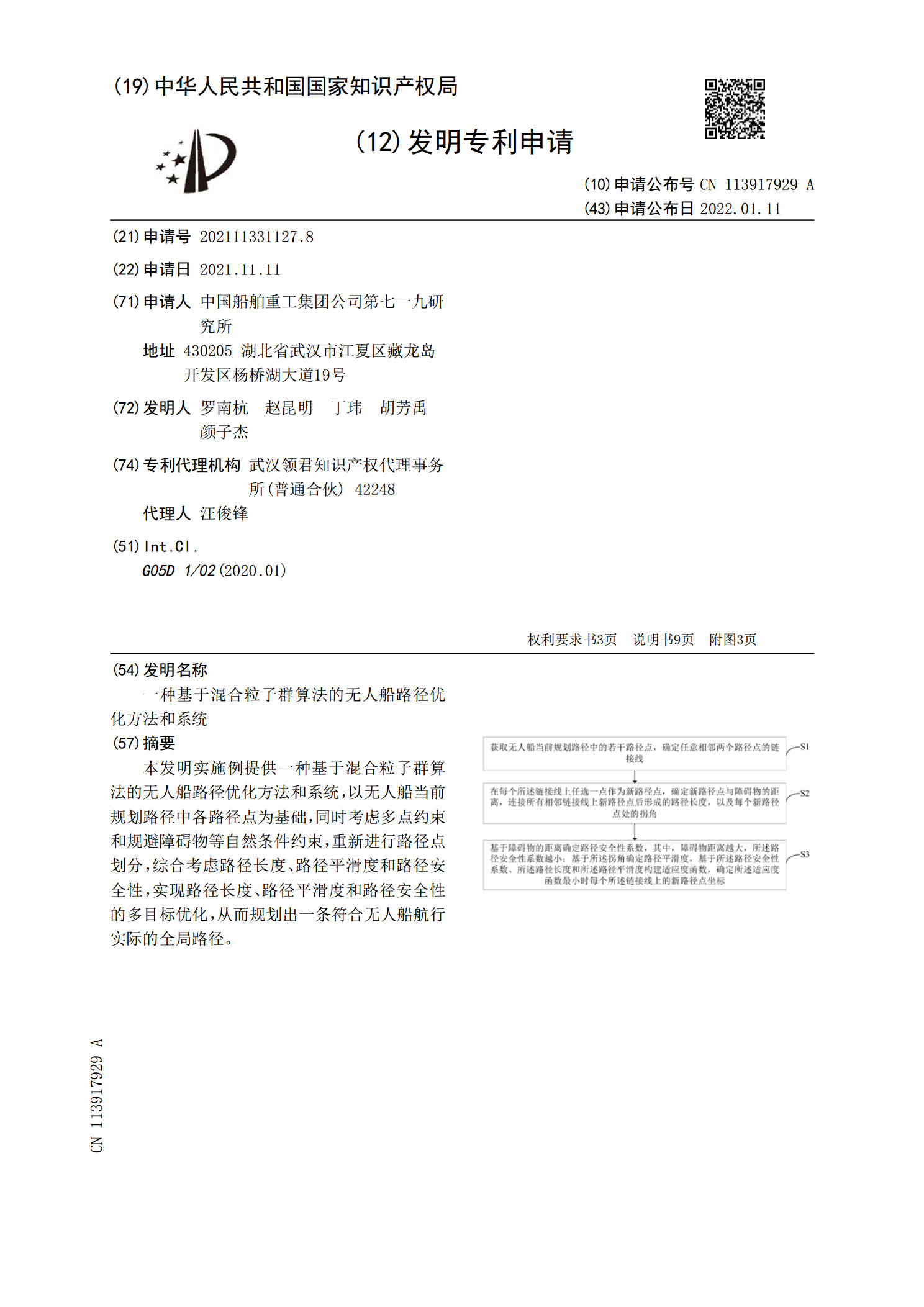
本发明提出一种基于路径优化的多目标辐射侦察方法,包括步骤1:辐射危害地域的生成与拓扑化处理;步骤:2:基于K‑means算法对侦察目标聚类;步骤3:基于改进蚁群算法对侦察路径优化;步骤S4:基于人体辐射剂量测算模型确定侦察距离限值;步骤5:合理确定辐射侦察路径和侦察方法。该方法可对辐射侦察目标进行优化聚类,可根据改进蚁群算法实现侦察路径优化,可根据人体吸收剂量限值的确定辐射侦察距离限值,可根据侦察任务和设备编组合理确定侦察路径和侦察方法。本发明可根据核辐射监测设备编组实现侦察目标群任务区分、实现辐射侦察路

一种基于进化多目标多任务优化的路径规划方法.pdf
本发明提供了一种基于进化多目标多任务优化的车辆路径规划方法,将车辆路径规划的每一个目标函数作为一个单独的任务,并利用多任务优化中的种群构造、信息迁移、子代生成、种群更新等操作对多个任务同时进行求解;采用多任务优化与多目标优化交替进行的两阶段策略,当满足设定的切换条件时,将多任务优化过程切换到多目标优化过程,通过多目标优化的种群构造、子代生成、种群更新、外部存档更新等操作优化非占优解集;采用基于精英保留的种群重构策略,当满足设定的重构条件时,只保留部分精英解,其余规划方案通过基于高斯游走的方式重新生成并加入
无人船路径规划方法及系统.pdf
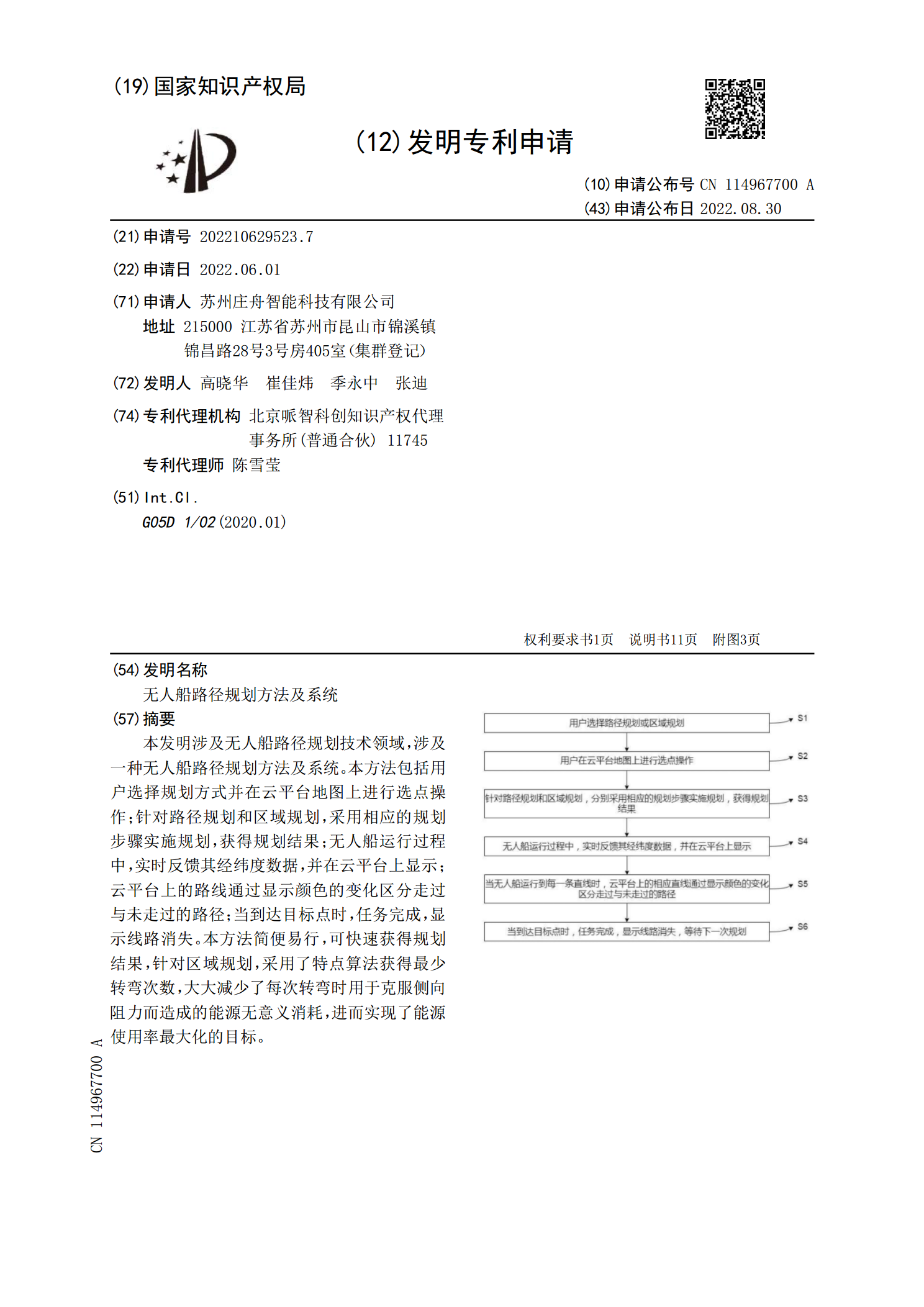
本发明涉及无人船路径规划技术领域,涉及一种无人船路径规划方法及系统。本方法包括用户选择规划方式并在云平台地图上进行选点操作;针对路径规划和区域规划,采用相应的规划步骤实施规划,获得规划结果;无人船运行过程中,实时反馈其经纬度数据,并在云平台上显示;云平台上的路线通过显示颜色的变化区分走过与未走过的路径;当到达目标点时,任务完成,显示线路消失。本方法简便易行,可快速获得规划结果,针对区域规划,采用了特点算法获得最少转弯次数,大大减少了每次转弯时用于克服侧向阻力而造成的能源无意义消耗,进而实现了能源使用率最大