
基于监督学习的双目相位展开方法.pdf

王秋****哥哥


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
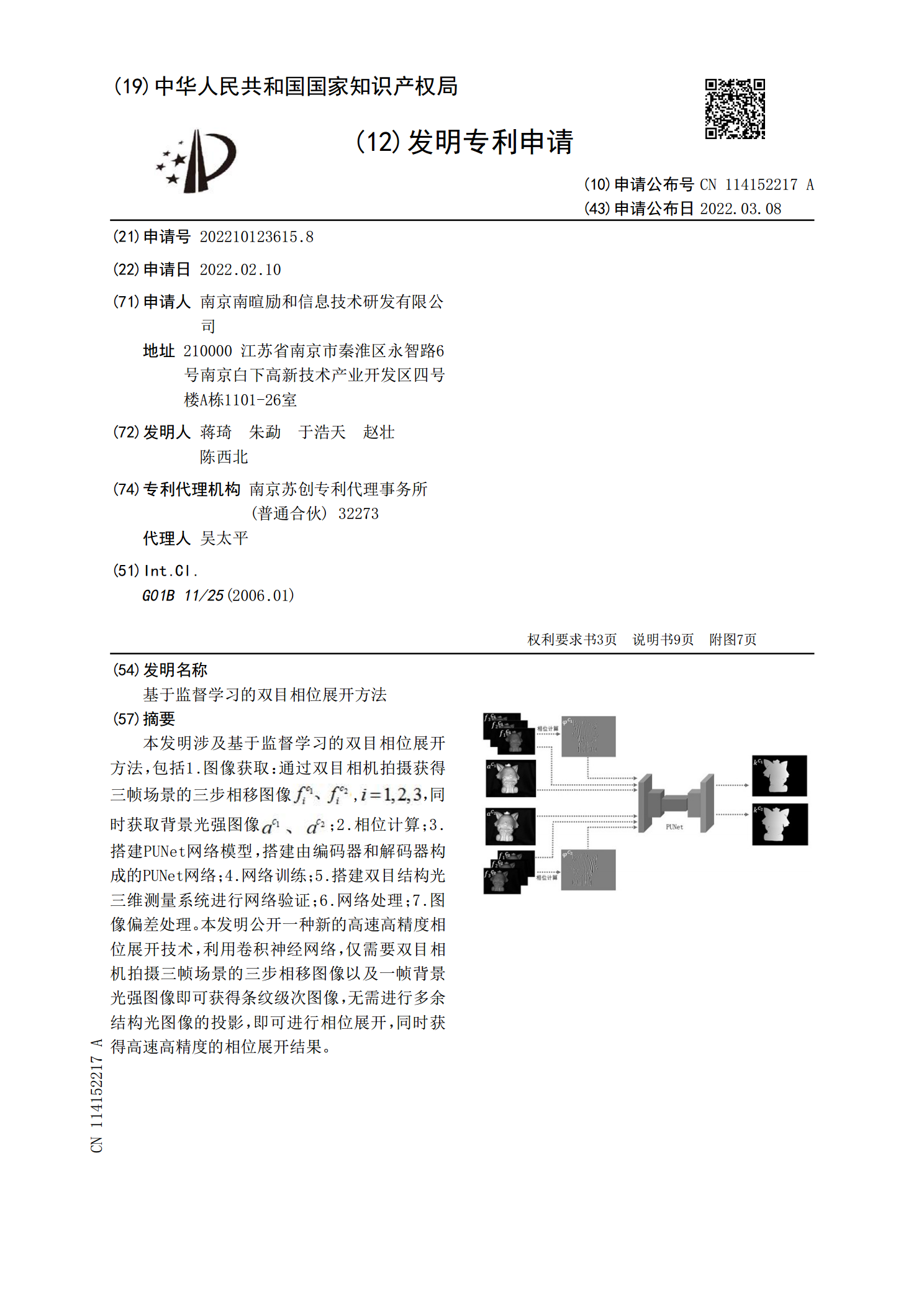
基于监督学习的双目相位展开方法.pdf
本发明涉及基于监督学习的双目相位展开方法,包括1.图像获取:通过双目相机拍摄获得三帧场景的三步相移图像
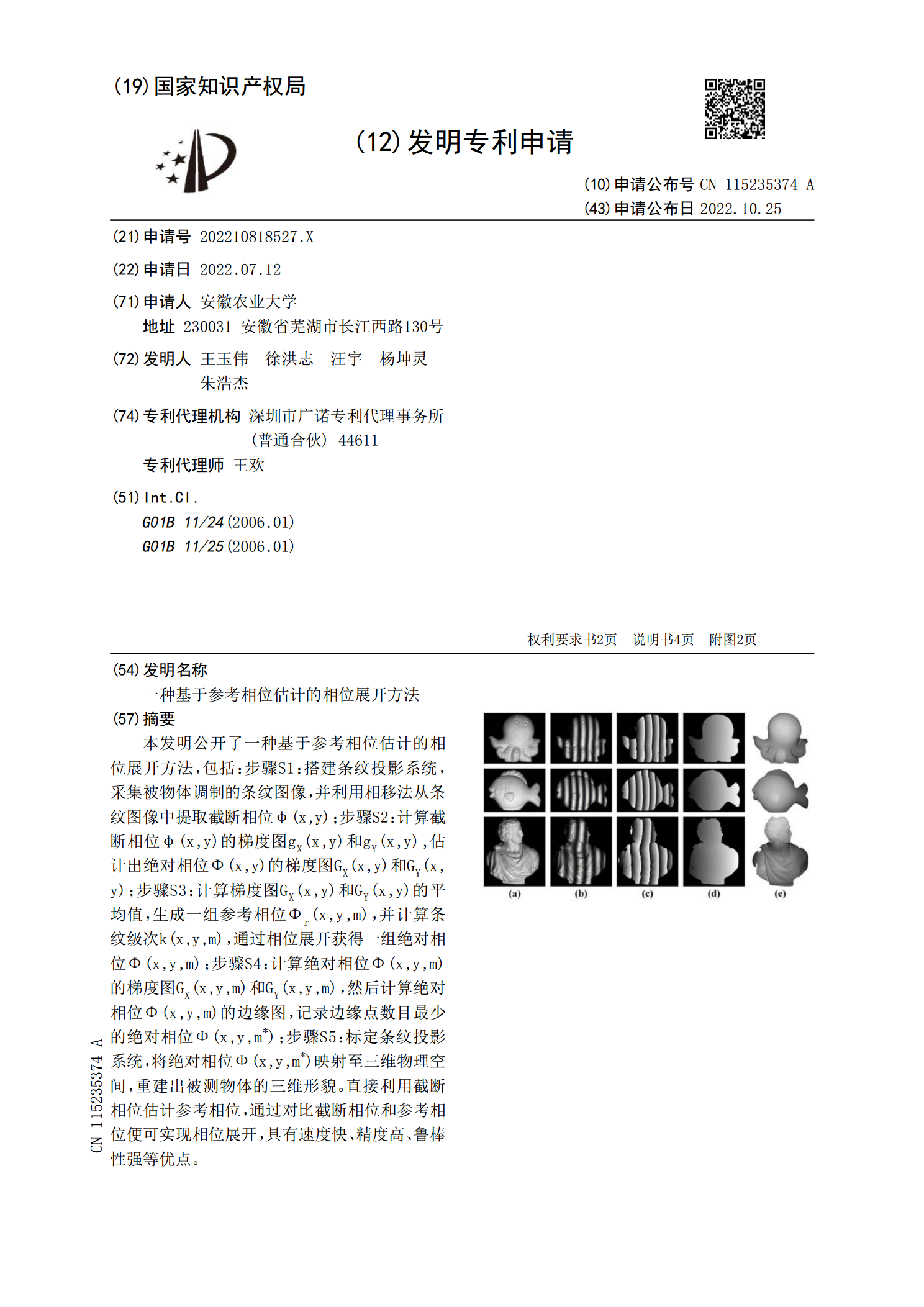
一种基于参考相位估计的相位展开方法.pdf
本发明公开了一种基于参考相位估计的相位展开方法,包括:步骤S1:搭建条纹投影系统,采集被物体调制的条纹图像,并利用相移法从条纹图像中提取截断相位φ(x,y);步骤S2:计算截断相位φ(x,y)的梯度图g

基于相位条纹的码相位测量方法.pdf
本发明公开了一种基于相位条纹的码相位测量方法,包括:选取接收机射频前端下变频的中频信号,以及跟踪环路进入稳定跟踪状态后的本地复制载波和本地复制码;对所述中频信号和本地复制载波滤除载波和多普勒频移,得到接收输入信号;将本地复制码作为本地输入信号;计算接收输入信号和本地输入信号的互功率谱相位,生成相位条纹;从相位条纹中求取条纹频率,得到所述接收输入信号与本地输入信号的间隔时延,从而得到码相位测量值。
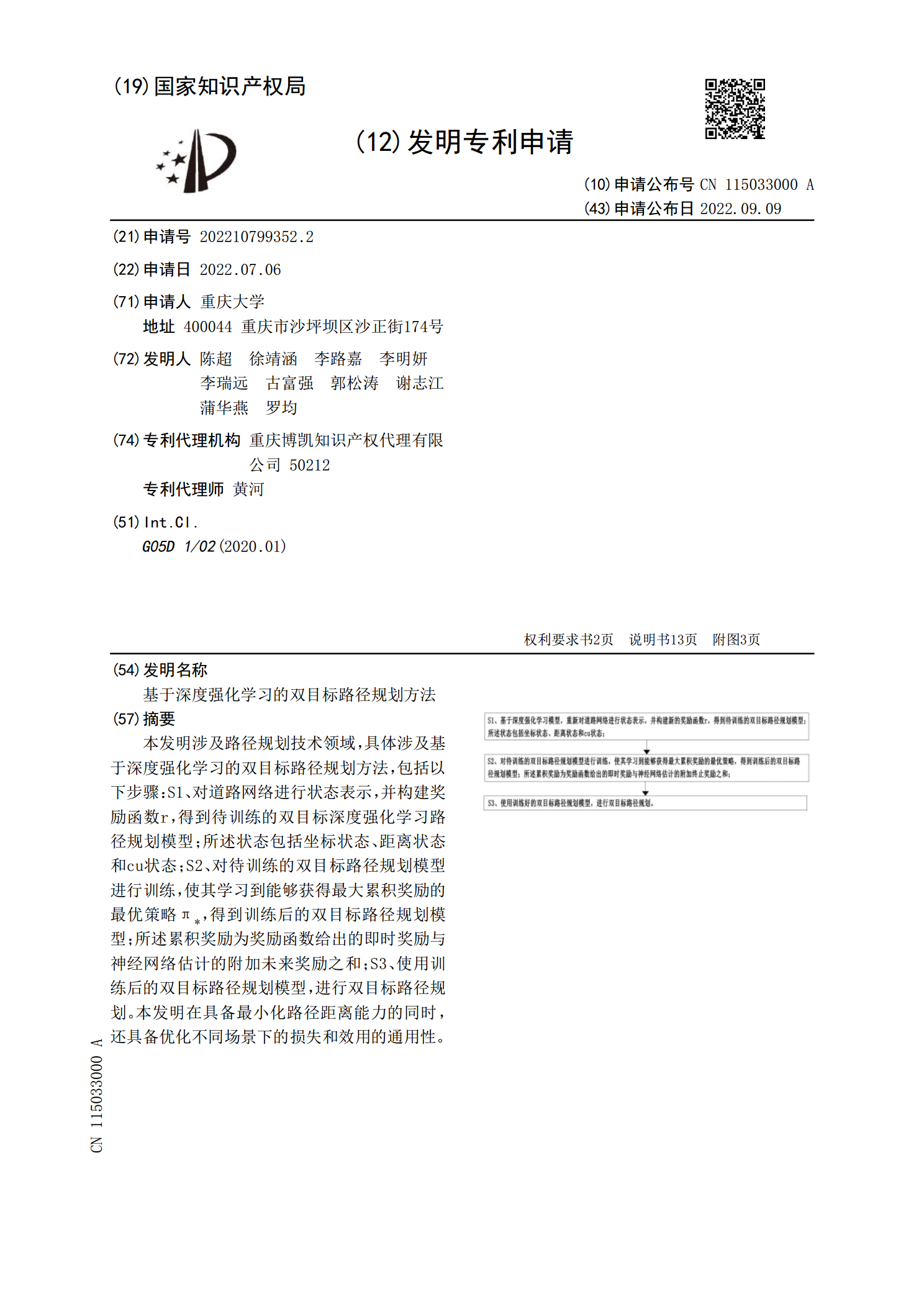
基于深度强化学习的双目标路径规划方法.pdf
本发明涉及路径规划技术领域,具体涉及基于深度强化学习的双目标路径规划方法,包括以下步骤:S1、对道路网络进行状态表示,并构建奖励函数r,得到待训练的双目标深度强化学习路径规划模型;所述状态包括坐标状态、距离状态和cu状态;S2、对待训练的双目标路径规划模型进行训练,使其学习到能够获得最大累积奖励的最优策略π

基于数字加权滤波的调制度排序相位展开的研究.docx
基于数字加权滤波的调制度排序相位展开的研究论文摘要:该文分析了相位展开技术在光栅投影测量法中的应用,基于数字加权滤波的调制度排序算法是合理和有效的,调制度排序算法解决了光栅投影中的相位展开问题,获得了展开后的真实的相位值。概述:利用光栅投影法原理进行三维物体轮廓测量,关键是要得到光栅的相位信息,然后从相位中提取出所包含的高度信息。获取相位的方法有多种,但是最终都是利用反正切函数求取相位值,直接得到的相位都卷折在区间内,这样得到的数据并非相位的真实值,需要将卷折的相位解开,得到真实的相位值,这个解开卷折相位