
姿态识别方法、装置、电子设备、工程机械和存储介质.pdf

是雁****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
姿态识别方法、装置、电子设备、工程机械和存储介质.pdf
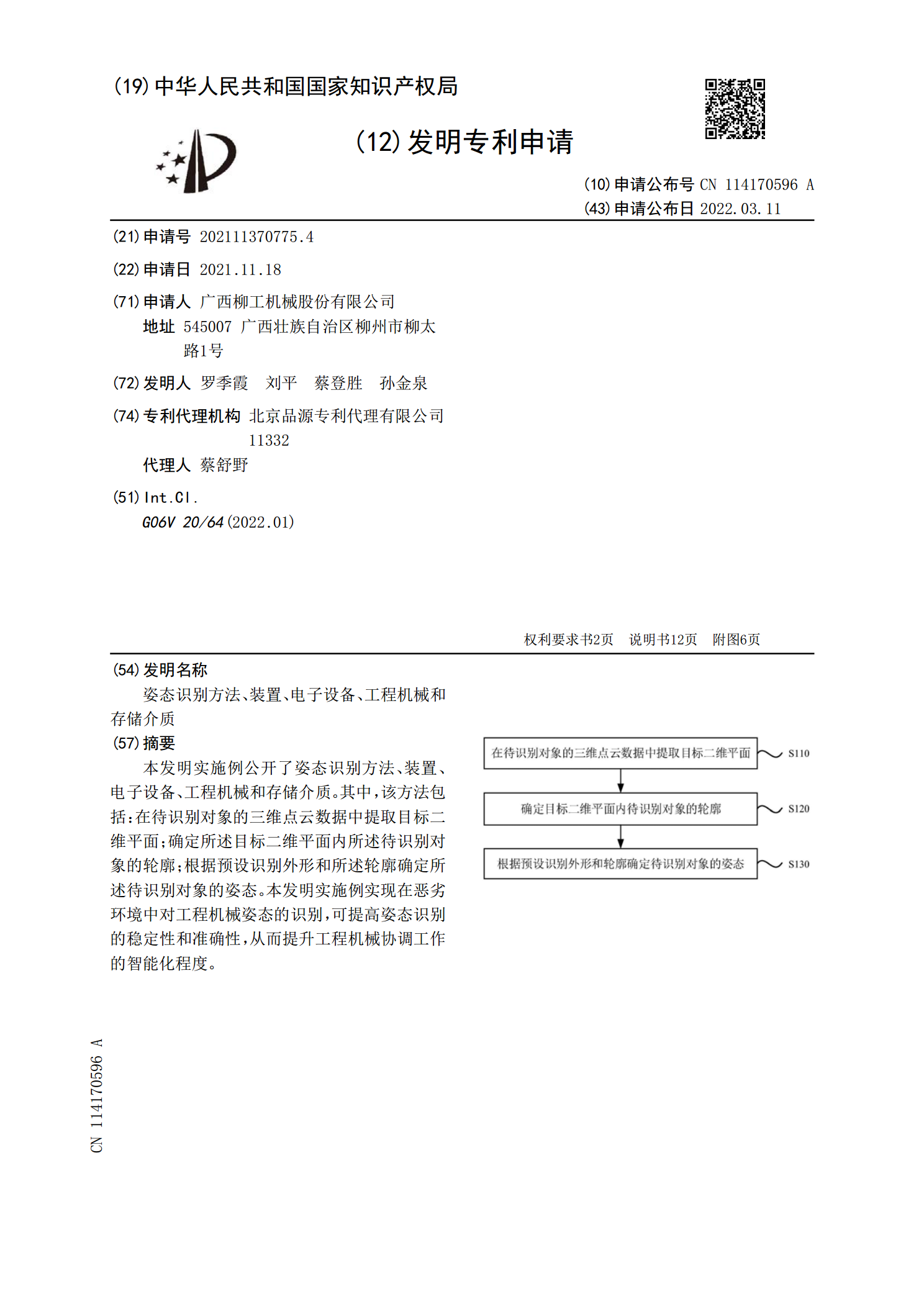
本发明实施例公开了姿态识别方法、装置、电子设备、工程机械和存储介质。其中,该方法包括:在待识别对象的三维点云数据中提取目标二维平面;确定所述目标二维平面内所述待识别对象的轮廓;根据预设识别外形和所述轮廓确定所述待识别对象的姿态。本发明实施例实现在恶劣环境中对工程机械姿态的识别,可提高姿态识别的稳定性和准确性,从而提升工程机械协调工作的智能化程度。
姿态识别方法、装置、存储介质和电子设备.pdf
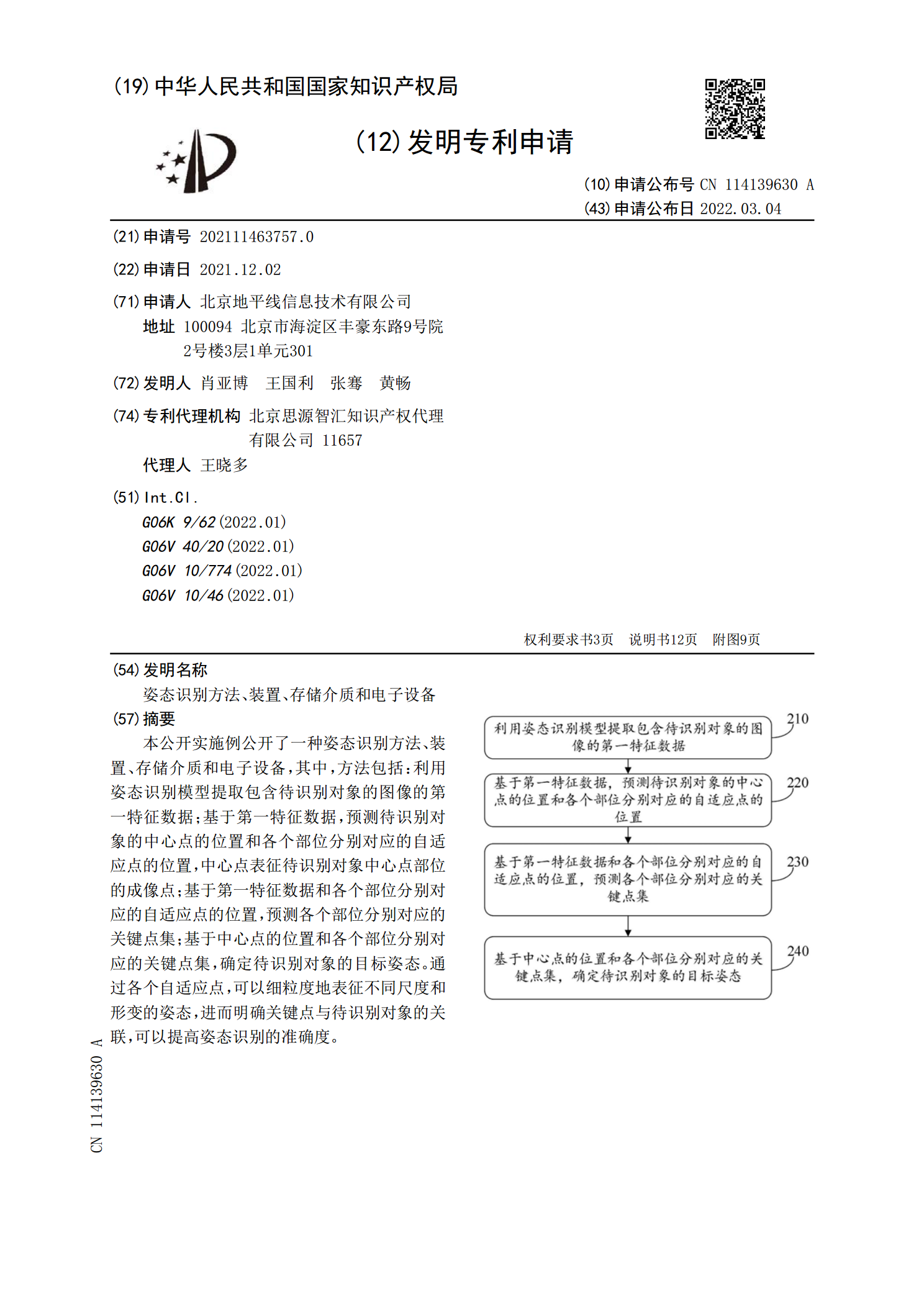
本公开实施例公开了一种姿态识别方法、装置、存储介质和电子设备,其中,方法包括:利用姿态识别模型提取包含待识别对象的图像的第一特征数据;基于第一特征数据,预测待识别对象的中心点的位置和各个部位分别对应的自适应点的位置,中心点表征待识别对象中心点部位的成像点;基于第一特征数据和各个部位分别对应的自适应点的位置,预测各个部位分别对应的关键点集;基于中心点的位置和各个部位分别对应的关键点集,确定待识别对象的目标姿态。通过各个自适应点,可以细粒度地表征不同尺度和形变的姿态,进而明确关键点与待识别对象的关联,可以提高
姿态识别方法、装置、存储介质和电子设备.pdf
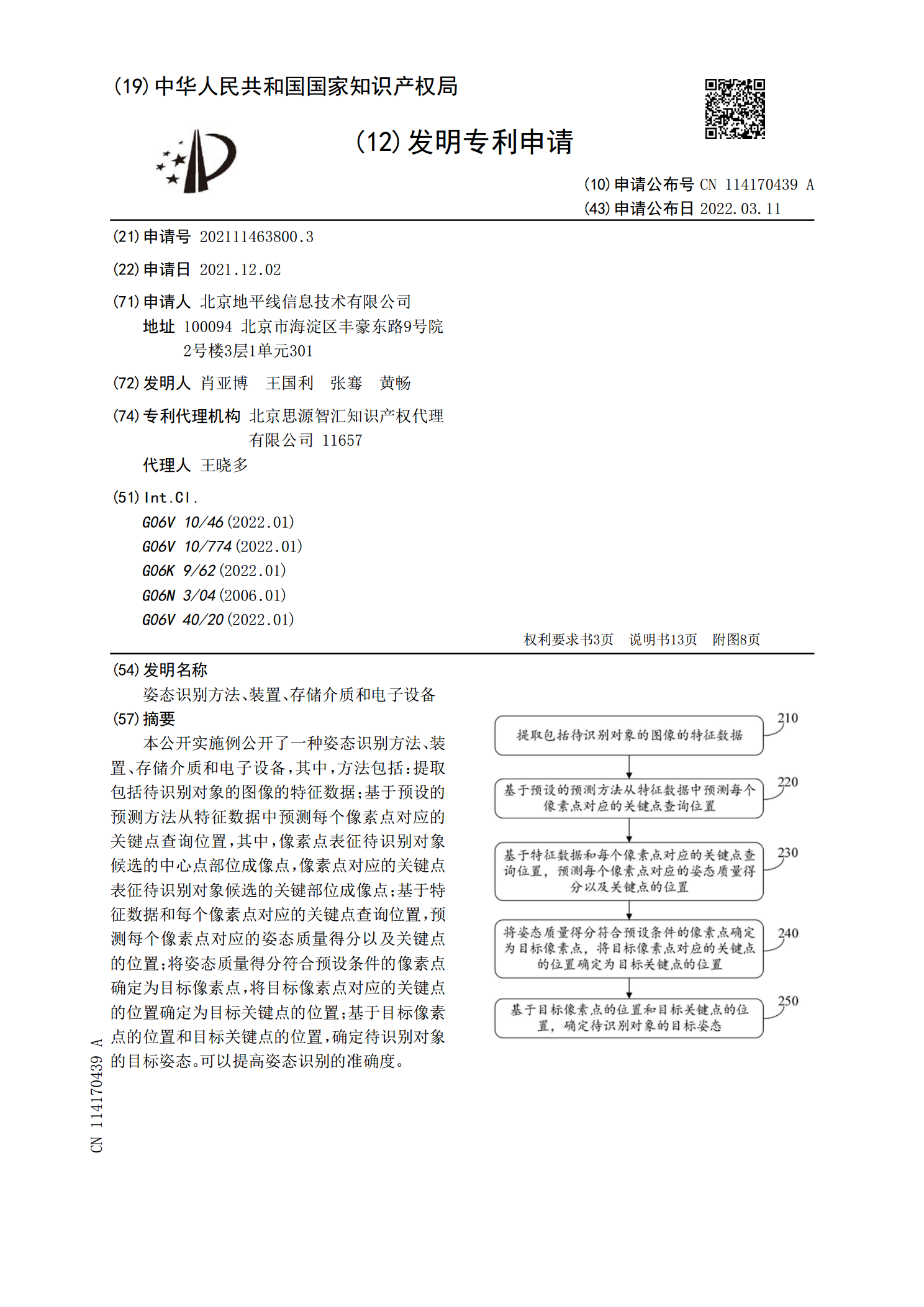
本公开实施例公开了一种姿态识别方法、装置、存储介质和电子设备,其中,方法包括:提取包括待识别对象的图像的特征数据;基于预设的预测方法从特征数据中预测每个像素点对应的关键点查询位置,其中,像素点表征待识别对象候选的中心点部位成像点,像素点对应的关键点表征待识别对象候选的关键部位成像点;基于特征数据和每个像素点对应的关键点查询位置,预测每个像素点对应的姿态质量得分以及关键点的位置;将姿态质量得分符合预设条件的像素点确定为目标像素点,将目标像素点对应的关键点的位置确定为目标关键点的位置;基于目标像素点的位置和目
书写姿态识别方法、装置、电子设备及存储介质.pdf
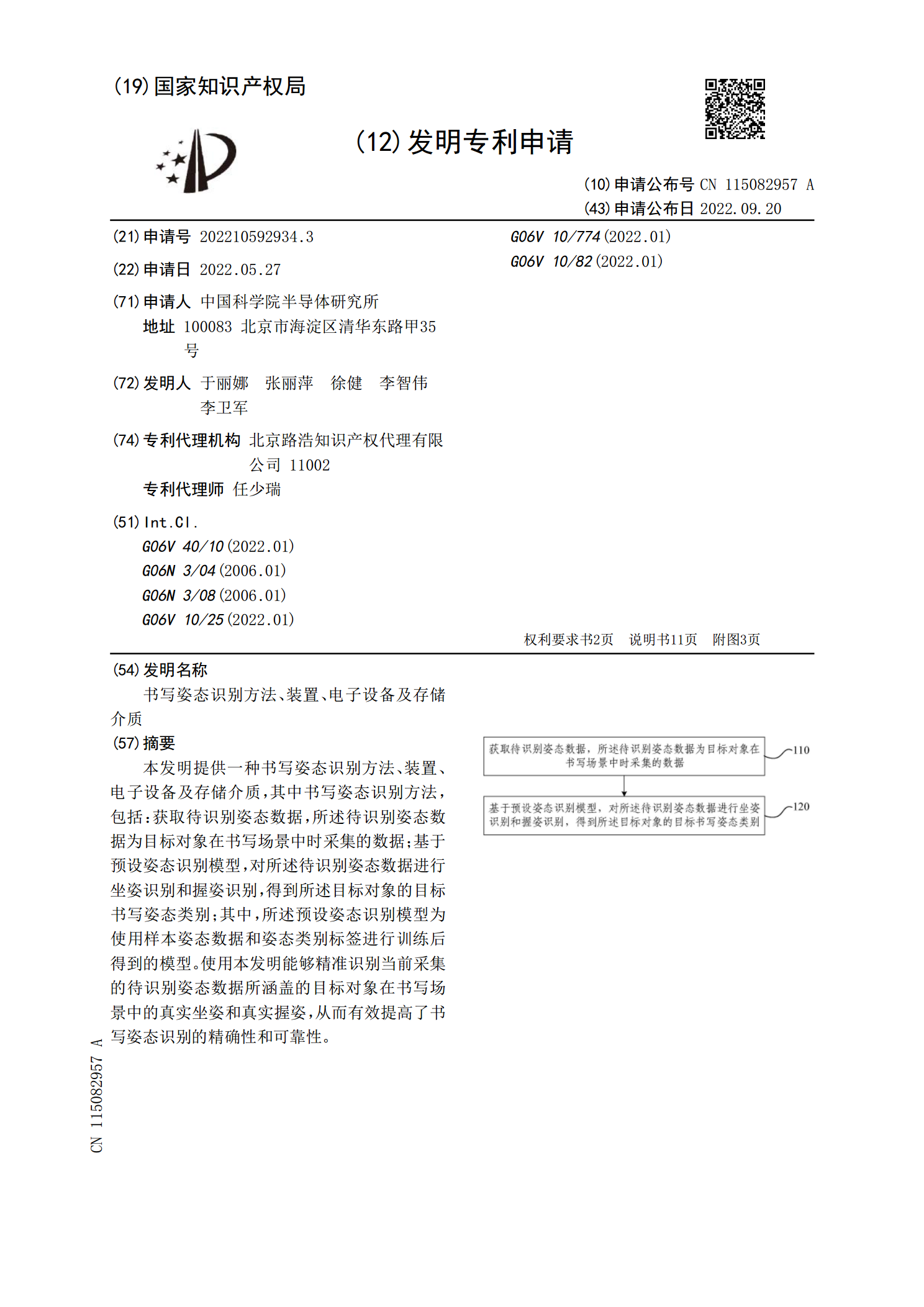
本发明提供一种书写姿态识别方法、装置、电子设备及存储介质,其中书写姿态识别方法,包括:获取待识别姿态数据,所述待识别姿态数据为目标对象在书写场景中时采集的数据;基于预设姿态识别模型,对所述待识别姿态数据进行坐姿识别和握姿识别,得到所述目标对象的目标书写姿态类别;其中,所述预设姿态识别模型为使用样本姿态数据和姿态类别标签进行训练后得到的模型。使用本发明能够精准识别当前采集的待识别姿态数据所涵盖的目标对象在书写场景中的真实坐姿和真实握姿,从而有效提高了书写姿态识别的精确性和可靠性。
单视角人体姿态识别方法、装置、电子设备和存储介质.pdf
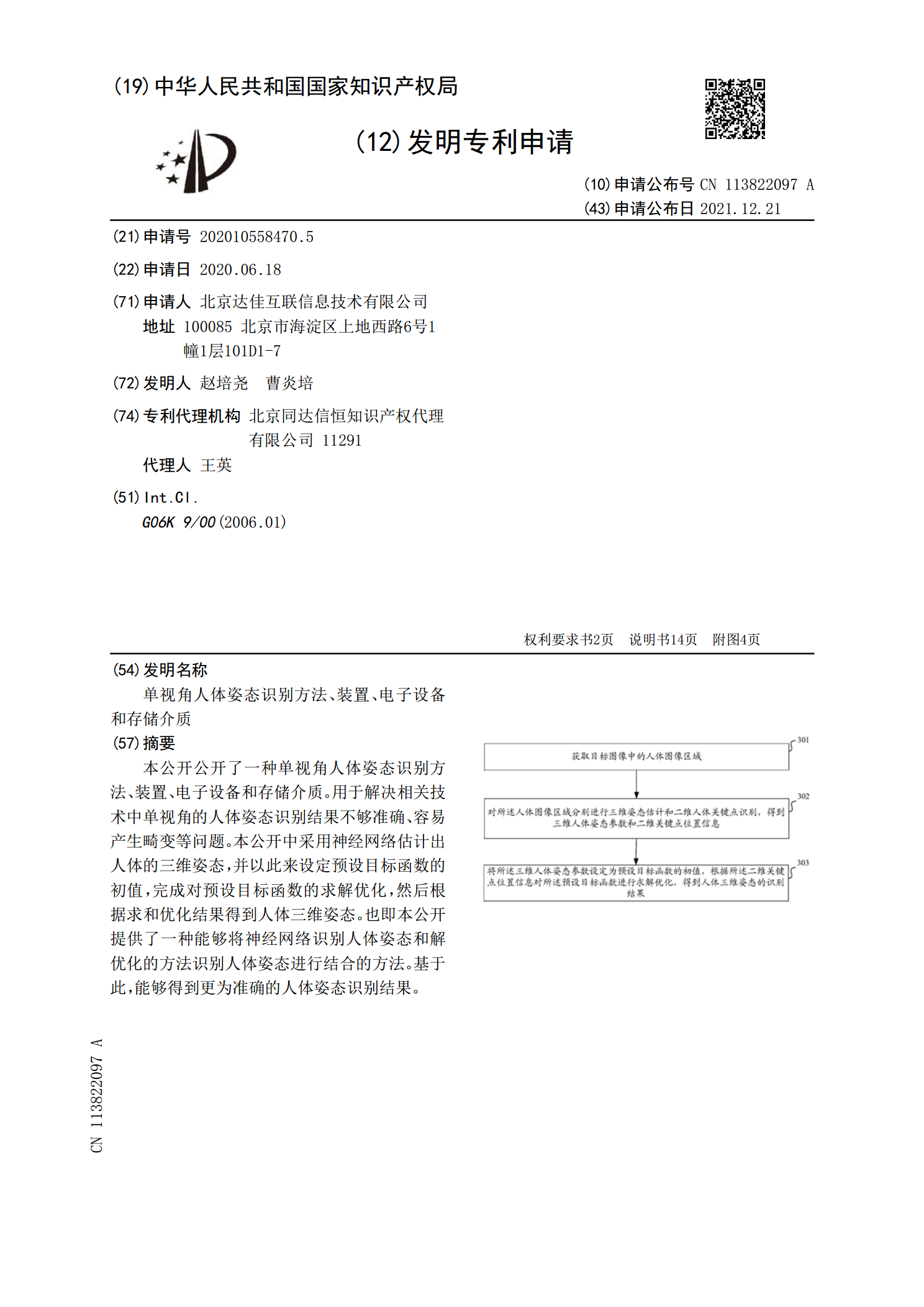
本公开公开了一种单视角人体姿态识别方法、装置、电子设备和存储介质。用于解决相关技术中单视角的人体姿态识别结果不够准确、容易产生畸变等问题。本公开中采用神经网络估计出人体的三维姿态,并以此来设定预设目标函数的初值,完成对预设目标函数的求解优化,然后根据求和优化结果得到人体三维姿态。也即本公开提供了一种能够将神经网络识别人体姿态和解优化的方法识别人体姿态进行结合的方法。基于此,能够得到更为准确的人体姿态识别结果。