
多尺度机非人检测方法、装置、介质及设备.pdf

St****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多尺度机非人检测方法、装置、介质及设备.pdf
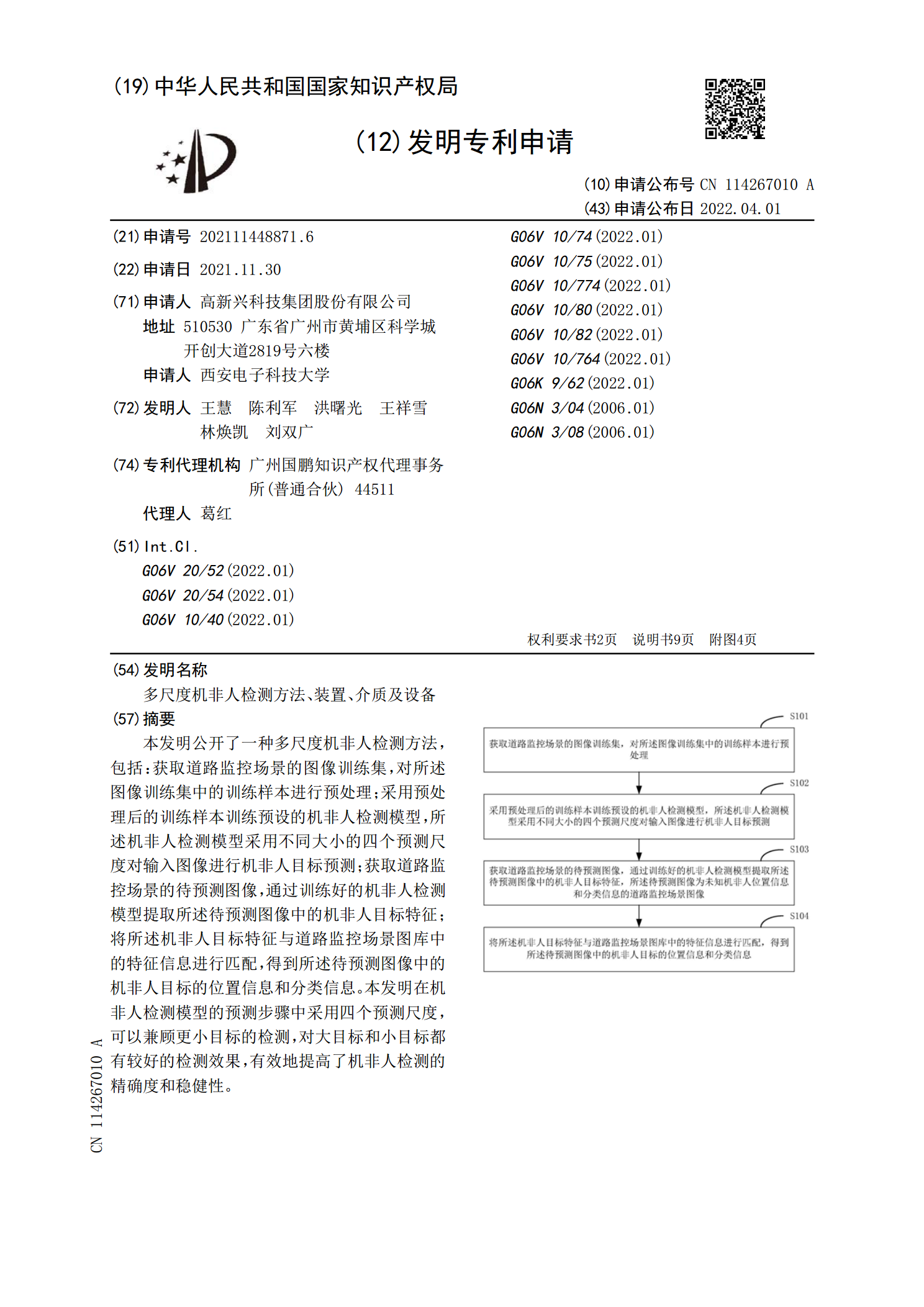
本发明公开了一种多尺度机非人检测方法,包括:获取道路监控场景的图像训练集,对所述图像训练集中的训练样本进行预处理;采用预处理后的训练样本训练预设的机非人检测模型,所述机非人检测模型采用不同大小的四个预测尺度对输入图像进行机非人目标预测;获取道路监控场景的待预测图像,通过训练好的机非人检测模型提取所述待预测图像中的机非人目标特征;将所述机非人目标特征与道路监控场景图库中的特征信息进行匹配,得到所述待预测图像中的机非人目标的位置信息和分类信息。本发明在机非人检测模型的预测步骤中采用四个预测尺度,可以兼顾更小目
基于图像增强的多尺度行人检测方法、装置、设备及介质.pdf
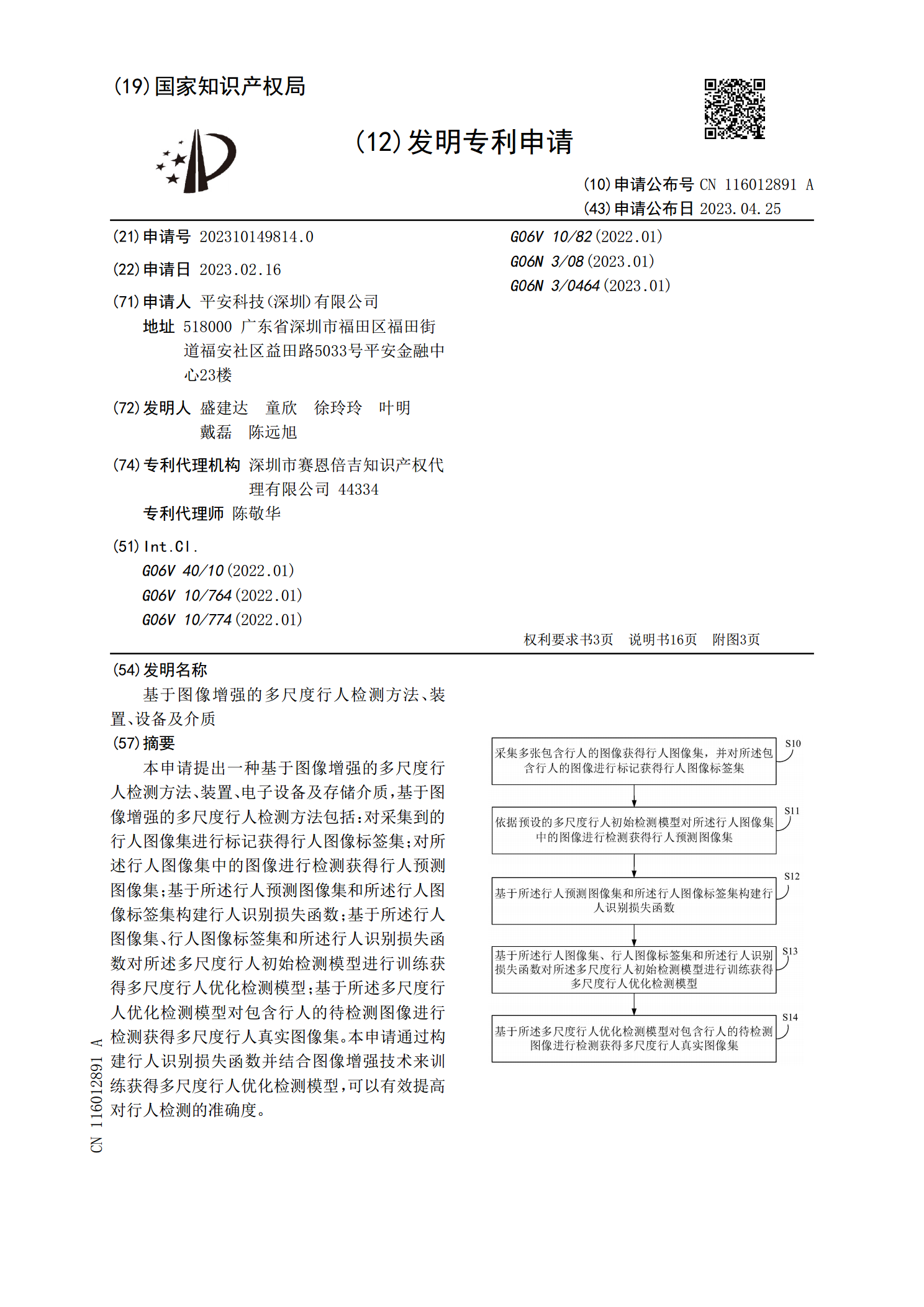
本申请提出一种基于图像增强的多尺度行人检测方法、装置、电子设备及存储介质,基于图像增强的多尺度行人检测方法包括:对采集到的行人图像集进行标记获得行人图像标签集;对所述行人图像集中的图像进行检测获得行人预测图像集;基于所述行人预测图像集和所述行人图像标签集构建行人识别损失函数;基于所述行人图像集、行人图像标签集和所述行人识别损失函数对所述多尺度行人初始检测模型进行训练获得多尺度行人优化检测模型;基于所述多尺度行人优化检测模型对包含行人的待检测图像进行检测获得多尺度行人真实图像集。本申请通过构建行人识别损失函
基于多尺度特征的火灾检测方法、装置、存储介质和设备.pdf
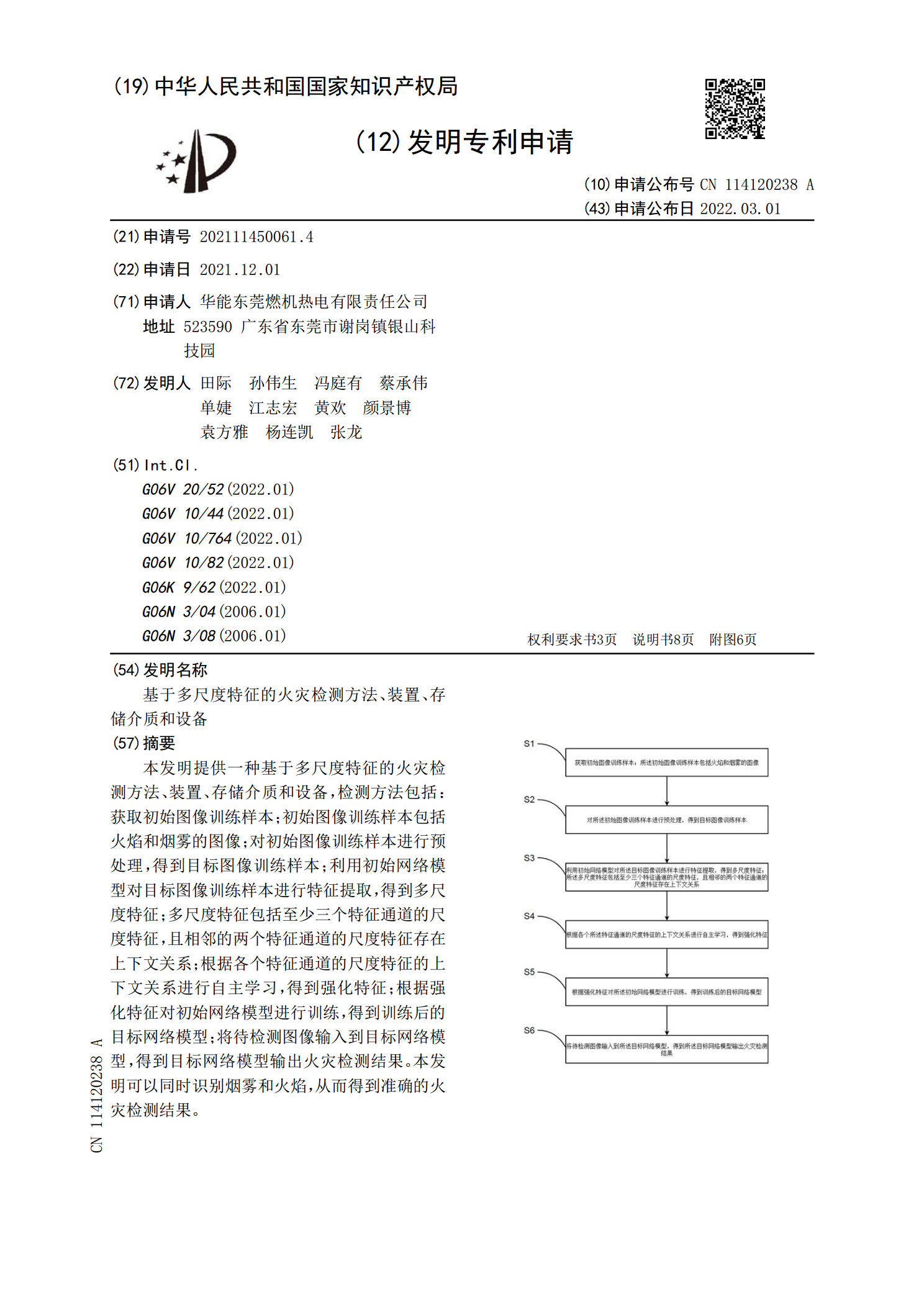
本发明提供一种基于多尺度特征的火灾检测方法、装置、存储介质和设备,检测方法包括:获取初始图像训练样本;初始图像训练样本包括火焰和烟雾的图像;对初始图像训练样本进行预处理,得到目标图像训练样本;利用初始网络模型对目标图像训练样本进行特征提取,得到多尺度特征;多尺度特征包括至少三个特征通道的尺度特征,且相邻的两个特征通道的尺度特征存在上下文关系;根据各个特征通道的尺度特征的上下文关系进行自主学习,得到强化特征;根据强化特征对初始网络模型进行训练,得到训练后的目标网络模型;将待检测图像输入到目标网络模型,得到目

地震属性多尺度融合方法、装置、电子设备及介质.pdf
公开了一种地震属性多尺度融合方法、装置、电子设备及介质。该方法可以包括:通过广义S变换对三维叠加地震资料进行频谱分解处理,获得多尺度地震数据体;根据多尺度地震数据体,计算多尺度属性数据;根据地质信息与多尺度属性数据进行对比,确定数据融合的源属性;通过视觉显著性图像融合算法进行地震属性图像融合,获得融合属性图像。本发明将数据融合算法和广义S变换频谱分解方法相结合,进行地震属性切片图像融合,其能够保留源属性切片的细节信息,突出源属性切片中的异常信号。
基于多尺度网络的水印识别方法、装置、设备及存储介质.pdf
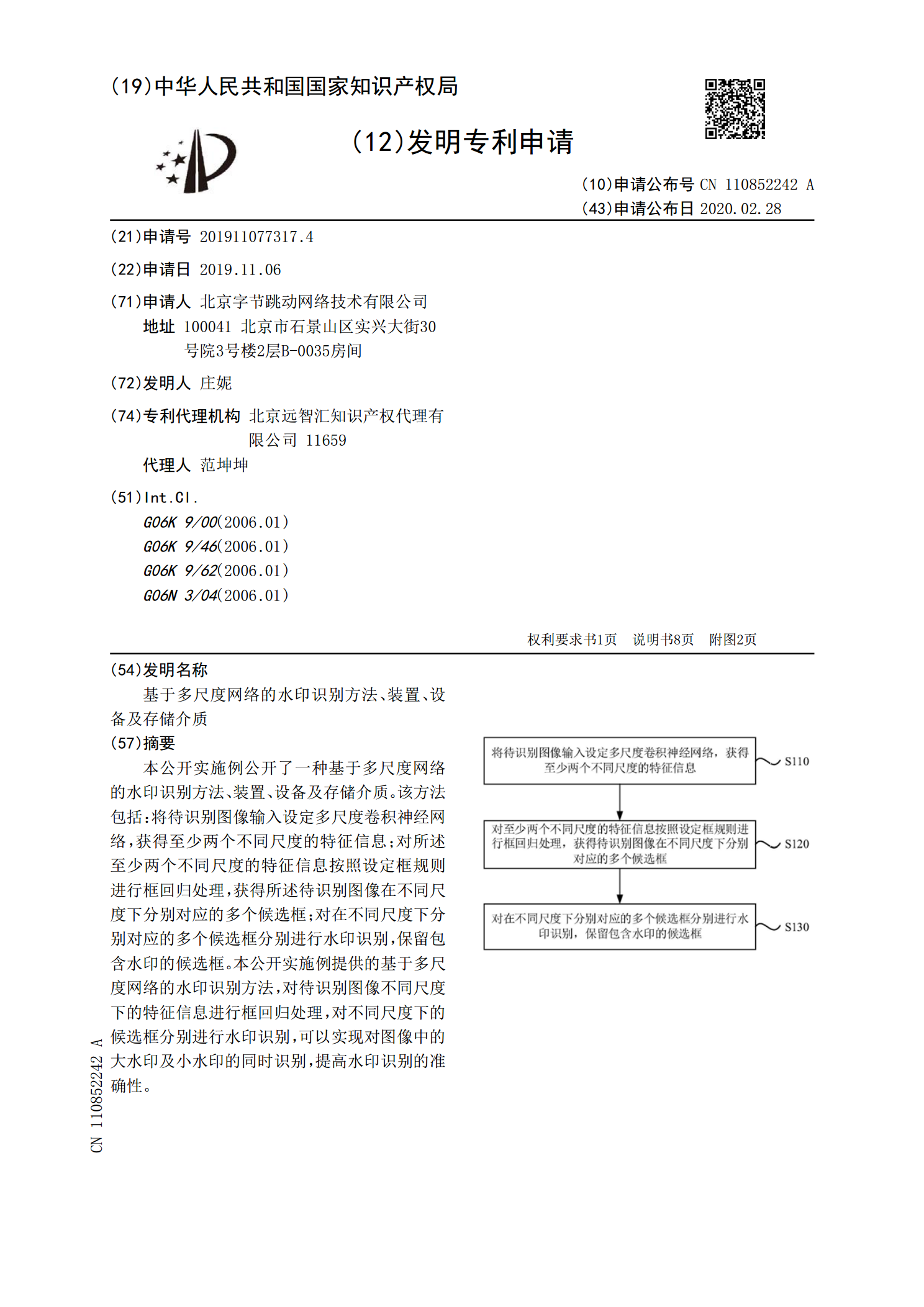
本公开实施例公开了一种基于多尺度网络的水印识别方法、装置、设备及存储介质。该方法包括:将待识别图像输入设定多尺度卷积神经网络,获得至少两个不同尺度的特征信息;对所述至少两个不同尺度的特征信息按照设定框规则进行框回归处理,获得所述待识别图像在不同尺度下分别对应的多个候选框;对在不同尺度下分别对应的多个候选框分别进行水印识别,保留包含水印的候选框。本公开实施例提供的基于多尺度网络的水印识别方法,对待识别图像不同尺度下的特征信息进行框回归处理,对不同尺度下的候选框分别进行水印识别,可以实现对图像中的大水印及小水