
一种基于虚拟空域滤波的压缩感知雷达压制性干扰抑制方法.pdf

书生****aa

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于虚拟空域滤波的压缩感知雷达压制性干扰抑制方法.pdf
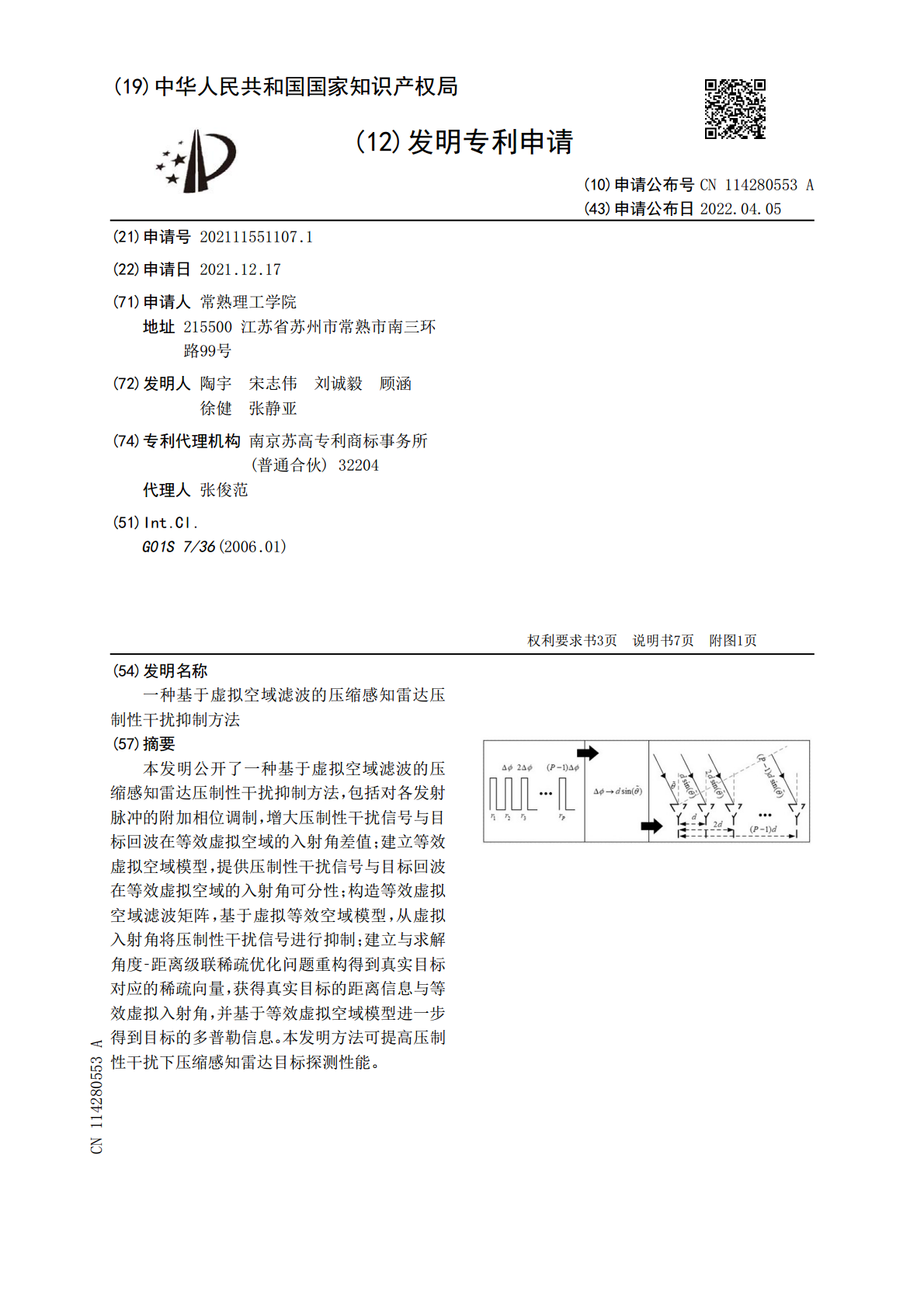
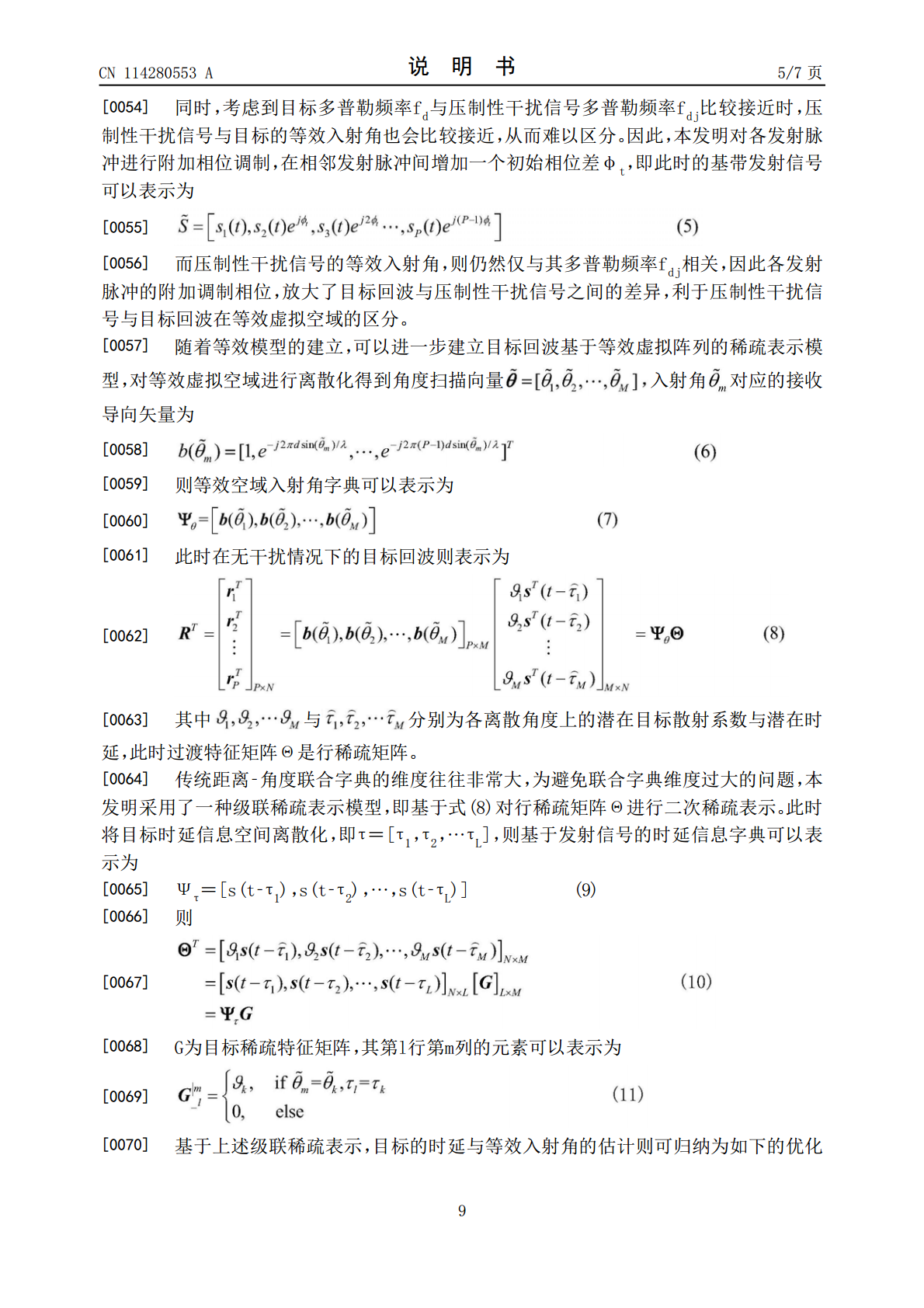
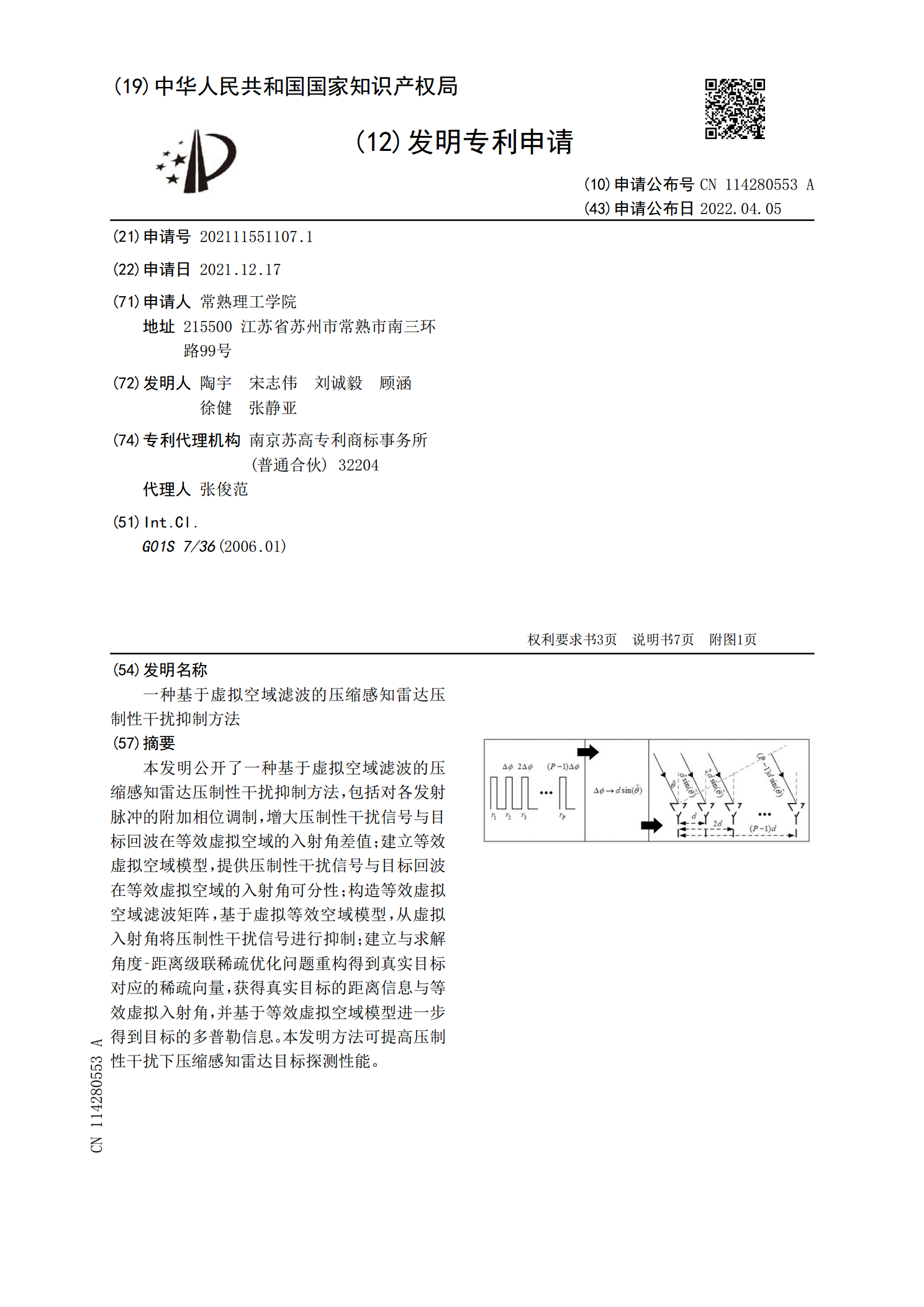
本发明公开了一种基于虚拟空域滤波的压缩感知雷达压制性干扰抑制方法,包括对各发射脉冲的附加相位调制,增大压制性干扰信号与目标回波在等效虚拟空域的入射角差值;建立等效虚拟空域模型,提供压制性干扰信号与目标回波在等效虚拟空域的入射角可分性;构造等效虚拟空域滤波矩阵,基于虚拟等效空域模型,从虚拟入射角将压制性干扰信号进行抑制;建立与求解角度‑距离级联稀疏优化问题重构得到真实目标对应的稀疏向量,获得真实目标的距离信息与等效虚拟入射角,并基于等效虚拟空域模型进一步得到目标的多普勒信息。本发明方法可提高压制性干扰下压缩

基于空域矩阵滤波和干扰对消的强干扰抑制方法.pdf
本发明是基于空域矩阵滤波和干扰对消的强干扰抑制方法。本发明主要用于抑制观测扇面外和观测扇面内的强干扰。通过子空间矩阵滤波,减小观测扇面外干扰影响,进而获得观测扇面内强干扰方位,并将其应用于阻塞矩阵的设计,构建新的不降低数据维数的阻塞阵。通过阻塞矩阵和空域矩阵滤波器对阵列接收数据进行处理,最后采用MUSIC谱进行方位估计。本发明在抑制观测扇面内强干扰的同时,保留了邻近方位的弱目标信息,实现强干扰条件下的弱目标方位估计。本发明属于一种水声阵列信号处理方法,可应用于阵列信号处理、弱目标方位探测等领域。

一种压缩感知雷达干扰信号识别分类方法.pdf
本发明公开了一种压缩感知雷达干扰信号识别分类方法,包括构造优化观测向量对回波脉冲信号群进行观测,并通过观测前后信号的功率变化来判断干扰信号存在与否。随后,分别针对转发式欺骗干扰信号、窄带噪声压制性干扰信号以及宽带噪声压制性干扰信号三类典型干扰信号设计相应的冗余字典,从而建立真实目标回波与各类干扰信号的联合稀疏表示模型,最后通过对联合稀疏表示模型进行优化求解,得到联合稀疏向量并基于该联合稀疏向量设计针对干扰信号分类的融合判决准则,实现对干扰信号的有效分类。本发明解决了干扰类型的识别和分类问题,为后续针对性的
一种压缩感知抑制射频干扰的工程实现方法.pdf
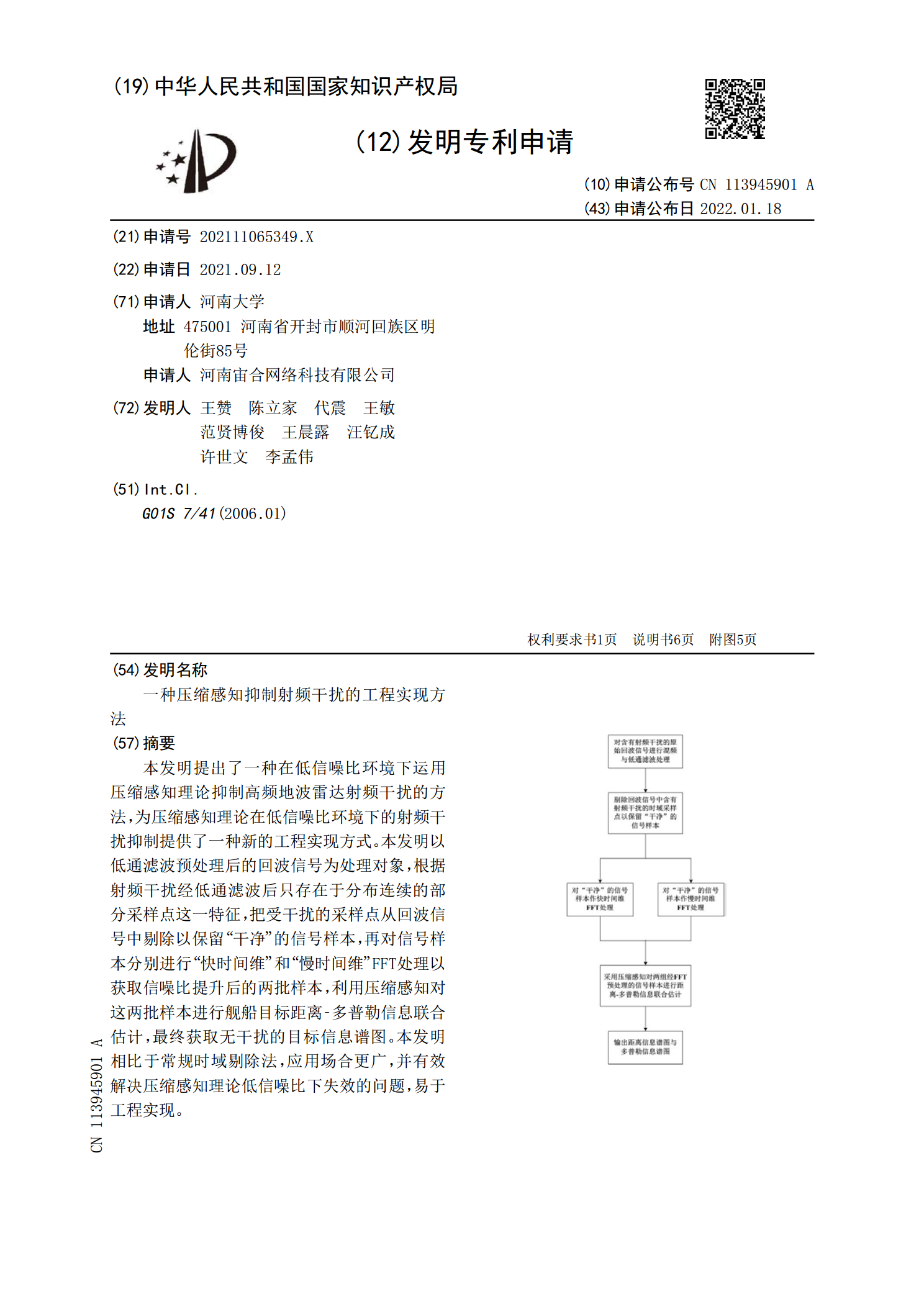
本发明提出了一种在低信噪比环境下运用压缩感知理论抑制高频地波雷达射频干扰的方法,为压缩感知理论在低信噪比环境下的射频干扰抑制提供了一种新的工程实现方式。本发明以低通滤波预处理后的回波信号为处理对象,根据射频干扰经低通滤波后只存在于分布连续的部分采样点这一特征,把受干扰的采样点从回波信号中剔除以保留“干净”的信号样本,再对信号样本分别进行“快时间维”和“慢时间维”FFT处理以获取信噪比提升后的两批样本,利用压缩感知对这两批样本进行舰船目标距离‑多普勒信息联合估计,最终获取无干扰的目标信息谱图。本发明相比于常

一种基于空频编码的压缩感知脉冲干扰抑制系统.pdf
一种基于空频编码的压缩感知脉冲干扰抑制系统,有发射机:依次串接的信道编码器、调制器、正交变换器、符号交织器、串并转换器和空频编码器,空频编码器分别连接两个结构相同的子载波映射器,子载波映射器依次连接上采样器、逆离散傅里叶变换器、循环前缀添加器、并串转换器、D/A转换及射频发射器以及发射天线;接收机有依次串接的接收天线、射频前端转换器和A/D转换器、多普勒频偏估计器和多普勒频偏补偿器、循环前缀移除器、离散傅里叶变换器、压缩感知干扰消除器、频域下采样器、信道估计器和空频译码器、符号解交织器、逆正交变换器、信道