
坡度确定方法以及相关装置、半挂汽车列车.pdf

王秋****哥哥

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
坡度确定方法以及相关装置、半挂汽车列车.pdf
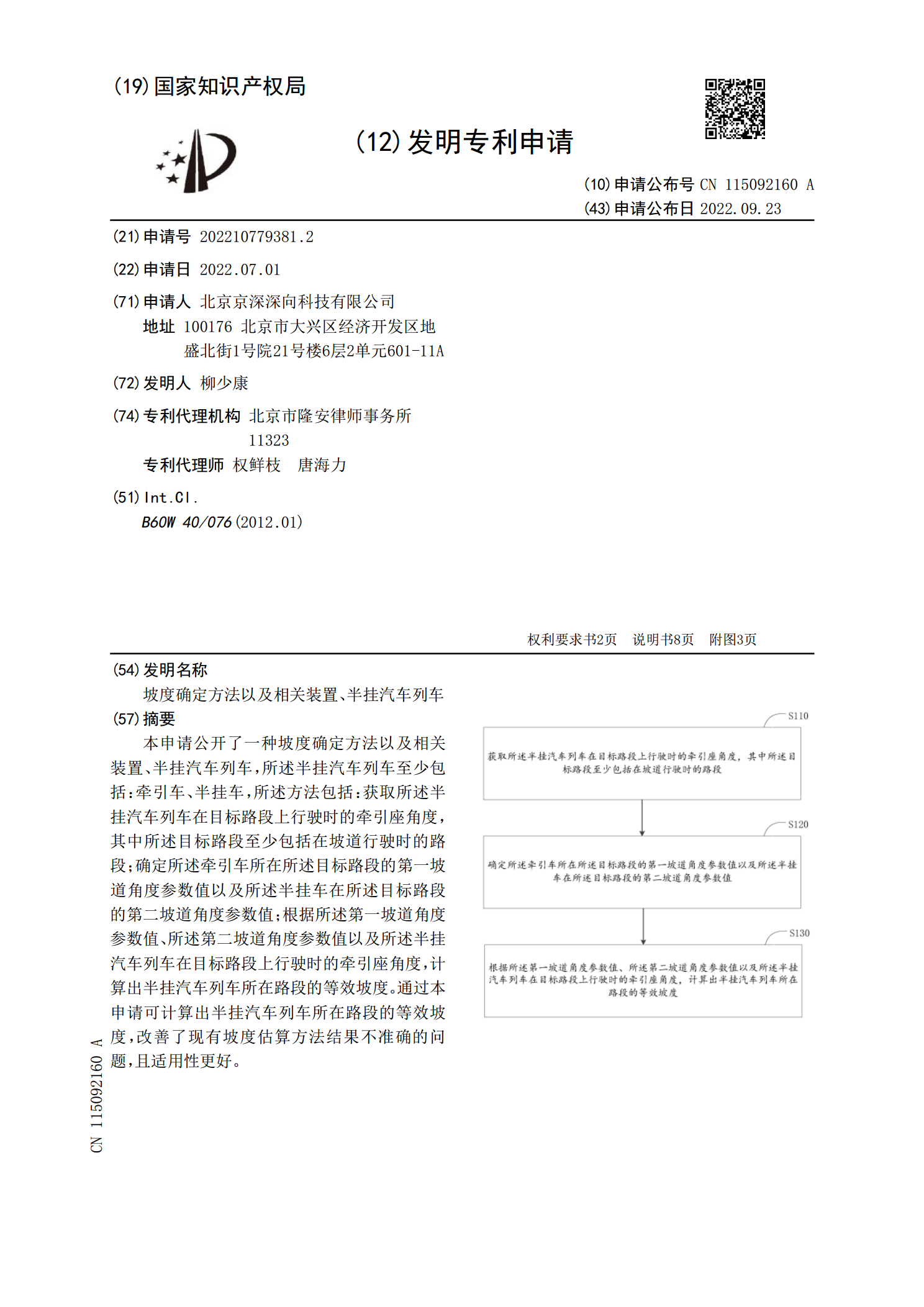
本申请公开了一种坡度确定方法以及相关装置、半挂汽车列车,所述半挂汽车列车至少包括:牵引车、半挂车,所述方法包括:获取所述半挂汽车列车在目标路段上行驶时的牵引座角度,其中所述目标路段至少包括在坡道行驶时的路段;确定所述牵引车所在所述目标路段的第一坡道角度参数值以及所述半挂车在所述目标路段的第二坡道角度参数值;根据所述第一坡道角度参数值、所述第二坡道角度参数值以及所述半挂汽车列车在目标路段上行驶时的牵引座角度,计算出半挂汽车列车所在路段的等效坡度。通过本申请可计算出半挂汽车列车所在路段的等效坡度,改善了现有坡
半挂汽车列车、拖斗位姿确定方法、装置、设备和介质.pdf
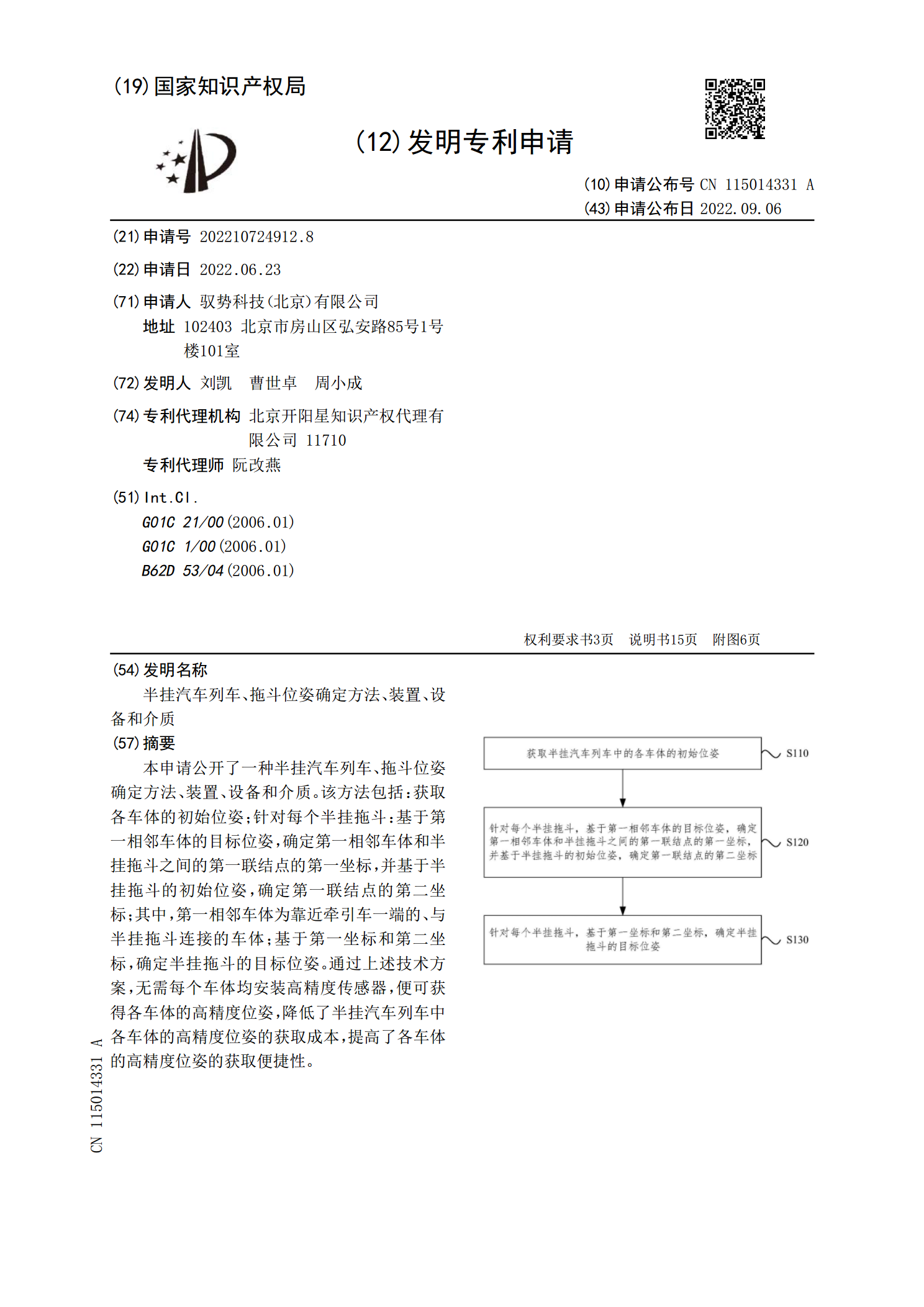
本申请公开了一种半挂汽车列车、拖斗位姿确定方法、装置、设备和介质。该方法包括:获取各车体的初始位姿;针对每个半挂拖斗:基于第一相邻车体的目标位姿,确定第一相邻车体和半挂拖斗之间的第一联结点的第一坐标,并基于半挂拖斗的初始位姿,确定第一联结点的第二坐标;其中,第一相邻车体为靠近牵引车一端的、与半挂拖斗连接的车体;基于第一坐标和第二坐标,确定半挂拖斗的目标位姿。通过上述技术方案,无需每个车体均安装高精度传感器,便可获得各车体的高精度位姿,降低了半挂汽车列车中各车体的高精度位姿的获取成本,提高了各车体的高精度位

半挂汽车列车自动防折叠装置.pdf
本发明公开了一种半挂汽车列车自动防折叠装置,该装置包括凸轮鼓式制动器(11)、曲柄连杆机构和控制系统,当车速、方向盘转角、第五轮转角以及制动踏板位置这四个条件同时满足相应的条件后,控制系统才向制动电磁阀(K1)发出制动指令,利用凸轮鼓式制动器11、曲柄连杆机构对牵引车(4)和半挂车(5)之间的相对转动进行约束,防止制动时折叠的发生;该装置可调节组合连杆(22)长度,以适配不同类型的牵引车或安装位置,且便于维修和更换。该装置可以应用于各种半挂汽车列车上,用于防止在高速行进中因刹车减速或紧急制动而由惯性造成的
半挂汽车列车液压再生制动优化控制方法、装置及系统.pdf
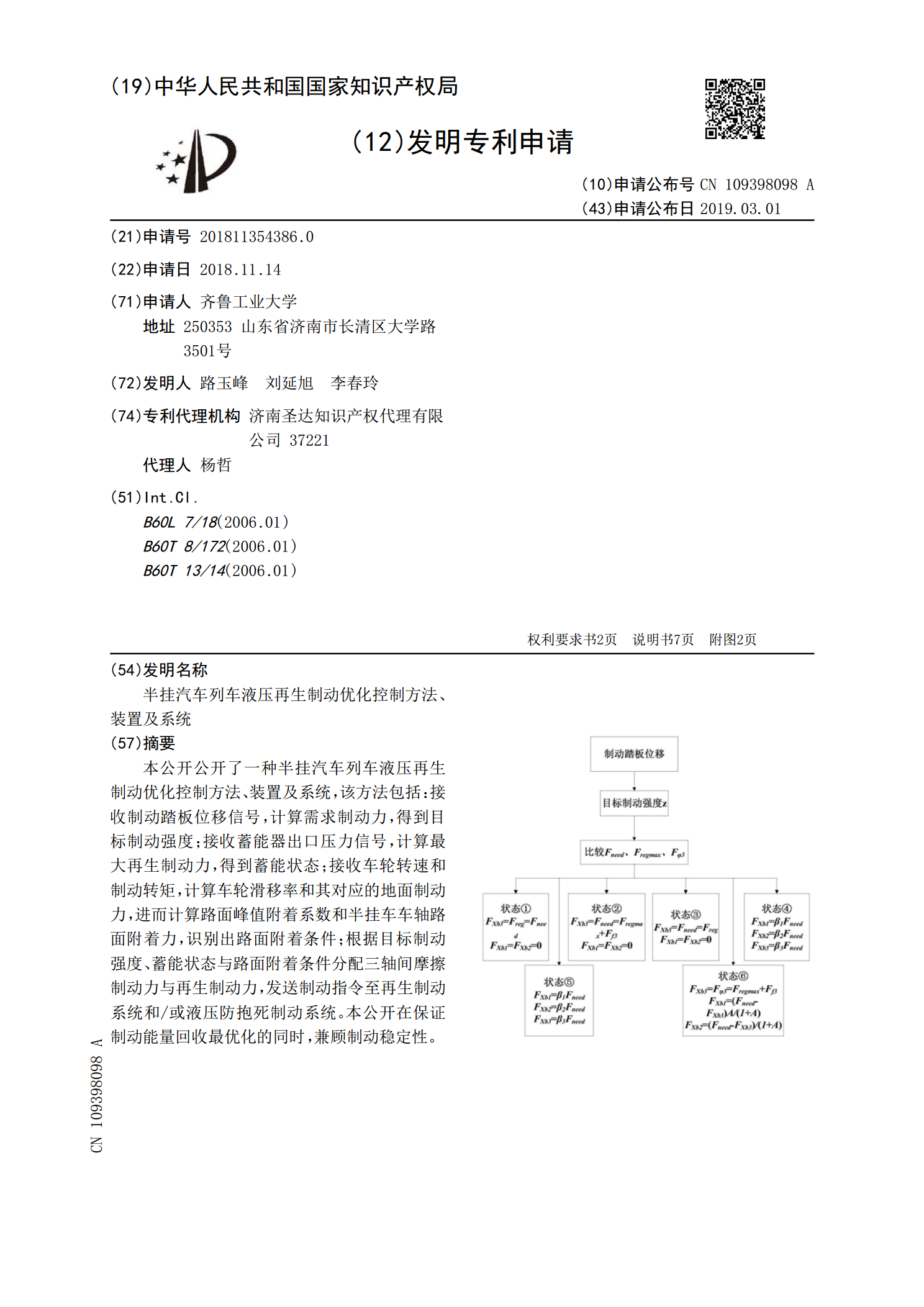
本公开公开了一种半挂汽车列车液压再生制动优化控制方法、装置及系统,该方法包括:接收制动踏板位移信号,计算需求制动力,得到目标制动强度;接收蓄能器出口压力信号,计算最大再生制动力,得到蓄能状态;接收车轮转速和制动转矩,计算车轮滑移率和其对应的地面制动力,进而计算路面峰值附着系数和半挂车车轴路面附着力,识别出路面附着条件;根据目标制动强度、蓄能状态与路面附着条件分配三轴间摩擦制动力与再生制动力,发送制动指令至再生制动系统和/或液压防抱死制动系统。本公开在保证制动能量回收最优化的同时,兼顾制动稳定性。
半挂汽车列车模型的建立与试验.pdf
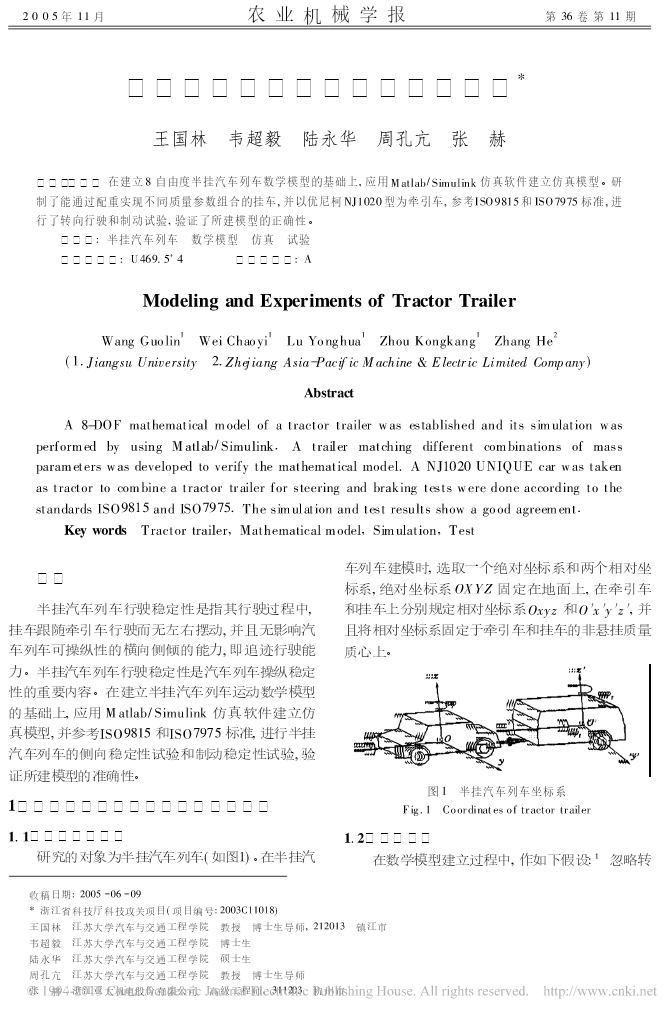
2005年11月农业机械学报第36卷第11期半挂汽车列车模型的建立与试验*王国林韦超毅陆永华周孔亢张赫【摘要】在建立8自由度半挂汽车列车数学模型的基础上,应用Matlab/Simulink仿真软件建立仿真模型。研制了能通过配重实现不同质量参数组合的挂车,并以优尼柯NJ1020型为牵引车,参考ISO9815和ISO7975标准,进行了转向行驶和制动试验,验证了所建模型的正确性。关键词:半挂汽车列车数学模型仿真试验中图分类号:U469.5+4文献标识码:AModelingandExperimentsofTra