
基于融合热力图像和RGB图像的茶叶嫩芽采摘点定位方法.pdf

永梅****33

1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于融合热力图像和RGB图像的茶叶嫩芽采摘点定位方法.pdf
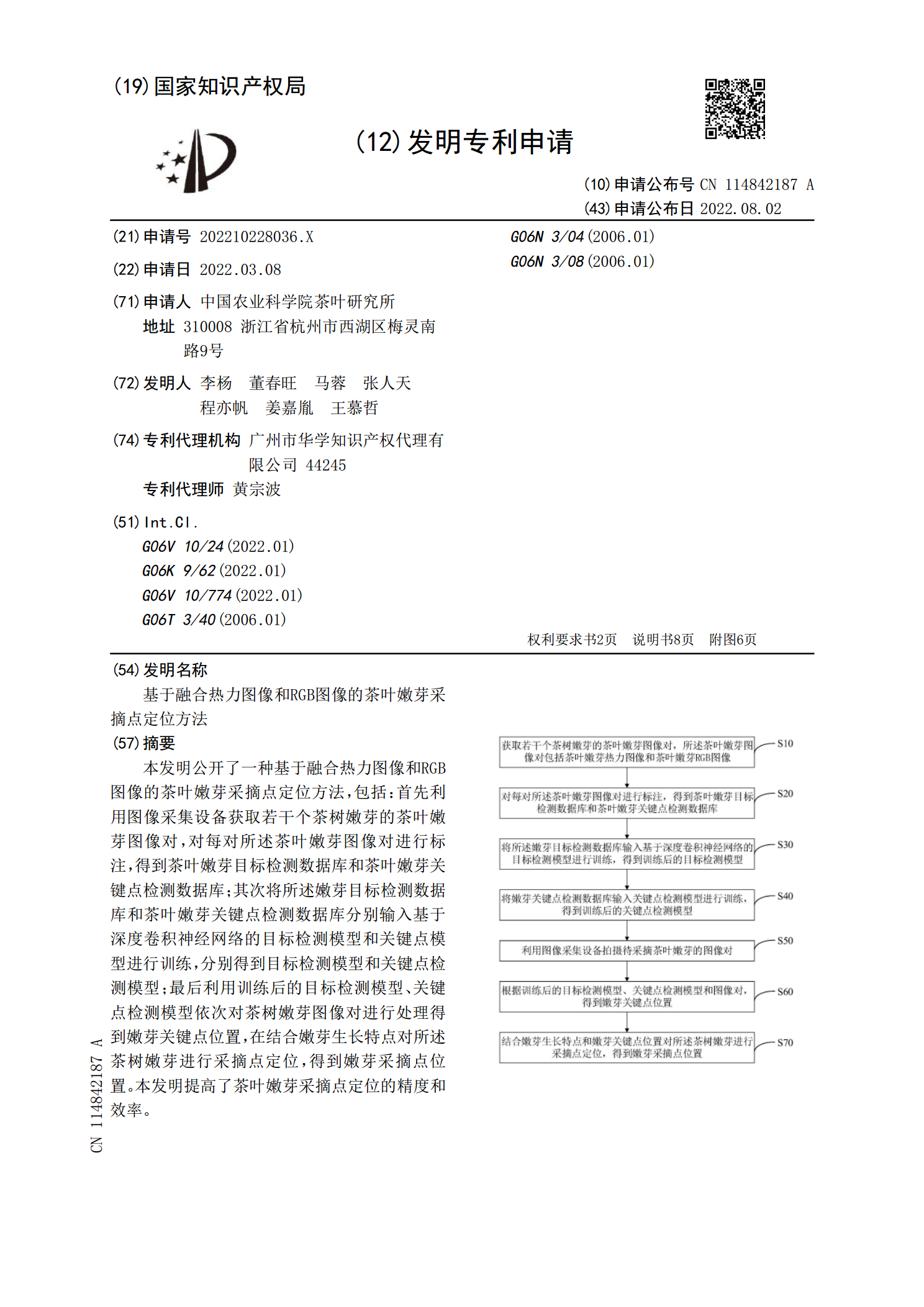
本发明公开了一种基于融合热力图像和RGB图像的茶叶嫩芽采摘点定位方法,包括:首先利用图像采集设备获取若干个茶树嫩芽的茶叶嫩芽图像对,对每对所述茶叶嫩芽图像对进行标注,得到茶叶嫩芽目标检测数据库和茶叶嫩芽关键点检测数据库;其次将所述嫩芽目标检测数据库和茶叶嫩芽关键点检测数据库分别输入基于深度卷积神经网络的目标检测模型和关键点模型进行训练,分别得到目标检测模型和关键点检测模型;最后利用训练后的目标检测模型、关键点检测模型依次对茶树嫩芽图像对进行处理得到嫩芽关键点位置,在结合嫩芽生长特点对所述茶树嫩芽进行采摘点
一种基于深度学习算法的茶叶嫩芽采摘点定位方法.pdf
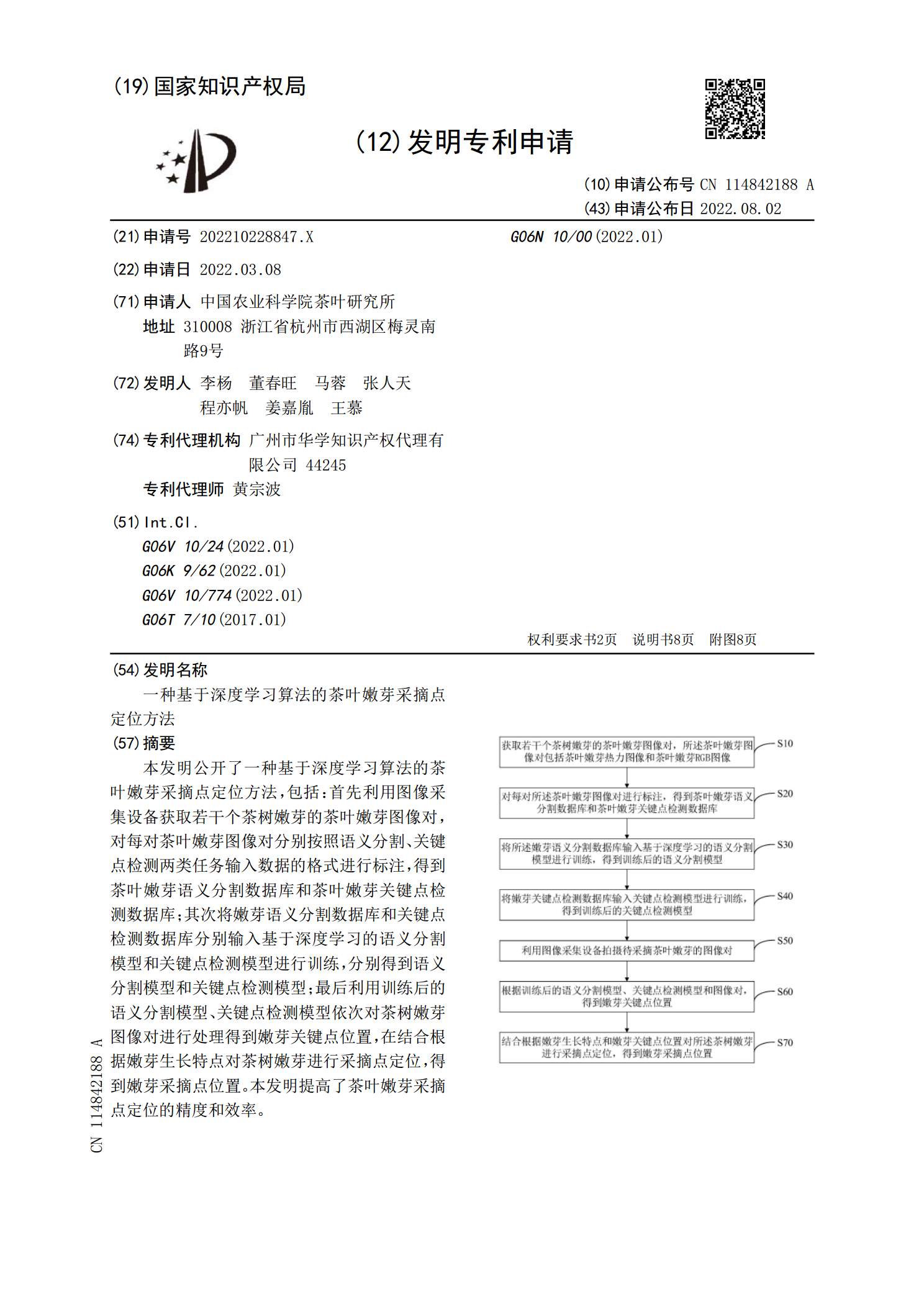
本发明公开了一种基于深度学习算法的茶叶嫩芽采摘点定位方法,包括:首先利用图像采集设备获取若干个茶树嫩芽的茶叶嫩芽图像对,对每对茶叶嫩芽图像对分别按照语义分割、关键点检测两类任务输入数据的格式进行标注,得到茶叶嫩芽语义分割数据库和茶叶嫩芽关键点检测数据库;其次将嫩芽语义分割数据库和关键点检测数据库分别输入基于深度学习的语义分割模型和关键点检测模型进行训练,分别得到语义分割模型和关键点检测模型;最后利用训练后的语义分割模型、关键点检测模型依次对茶树嫩芽图像对进行处理得到嫩芽关键点位置,在结合根据嫩芽生长特点对
一种基于点特征和轮廓特征融合的图像匹配定位方法.pdf
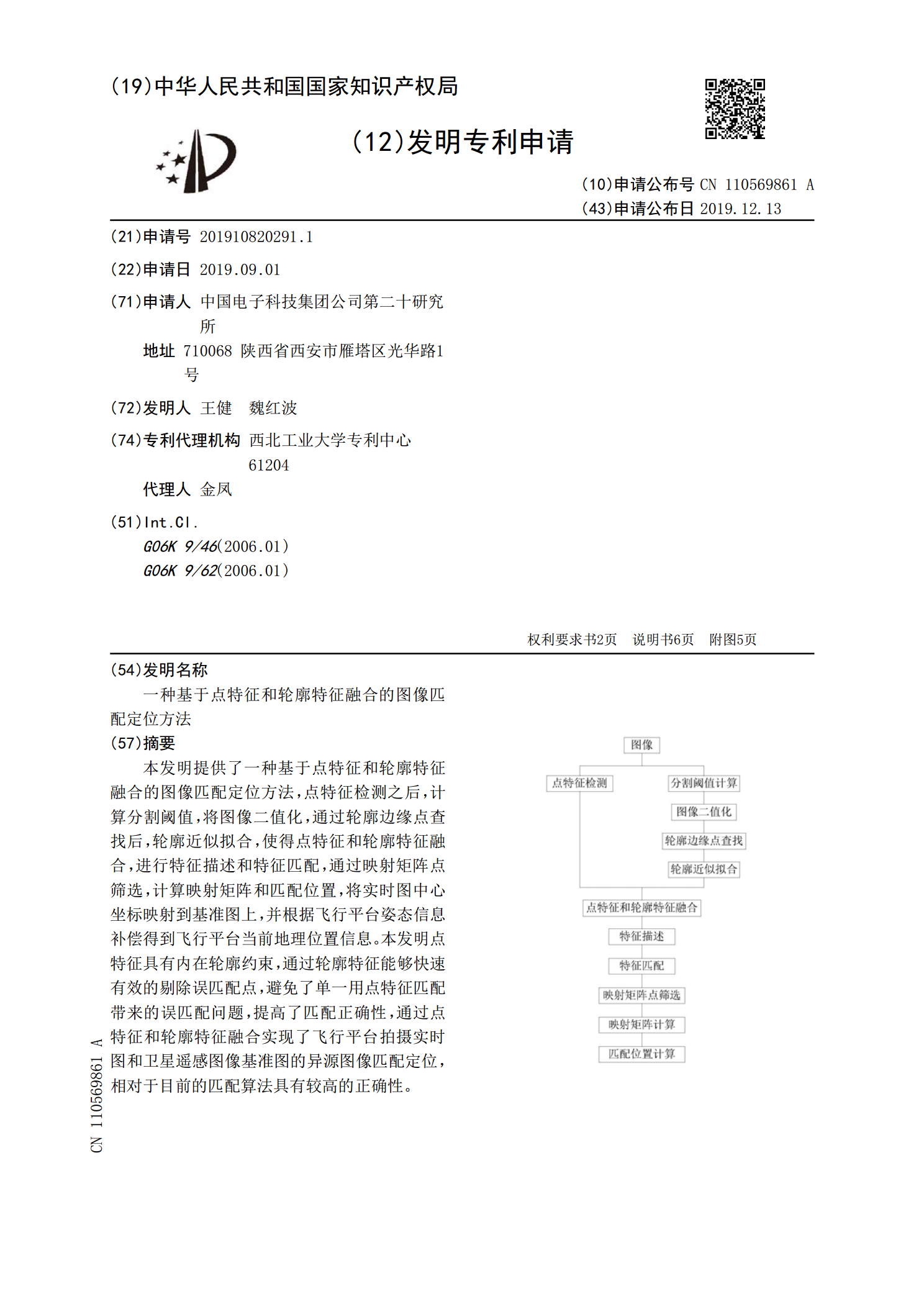
本发明提供了一种基于点特征和轮廓特征融合的图像匹配定位方法,点特征检测之后,计算分割阈值,将图像二值化,通过轮廓边缘点查找后,轮廓近似拟合,使得点特征和轮廓特征融合,进行特征描述和特征匹配,通过映射矩阵点筛选,计算映射矩阵和匹配位置,将实时图中心坐标映射到基准图上,并根据飞行平台姿态信息补偿得到飞行平台当前地理位置信息。本发明点特征具有内在轮廓约束,通过轮廓特征能够快速有效的剔除误匹配点,避免了单一用点特征匹配带来的误匹配问题,提高了匹配正确性,通过点特征和轮廓特征融合实现了飞行平台拍摄实时图和卫星遥感图

基于实例分割的大场景下茶叶嫩芽轮廓提取与采摘点定位.docx
基于实例分割的大场景下茶叶嫩芽轮廓提取与采摘点定位一、研究背景和意义随着社会经济的快速发展,茶叶产业在全球范围内得到了广泛关注。茶叶作为中国传统的特色农产品,具有悠久的历史和丰富的文化内涵。茶叶产业逐渐向大农业、大健康、大旅游等多元化方向发展,对茶叶嫩芽的品质和产量提出了更高的要求。在实际生产过程中,茶叶嫩芽的采摘和加工往往面临着诸多挑战,如嫩芽的形态特征难以准确识别、采摘点定位不准确等问题。这些问题不仅影响了茶叶的品质和产量,也制约了茶叶产业的发展。实例分割技术是一种基于深度学习的目标检测方法,通过对图

基于图像增强与NSCT的红外和可见光图像融合方法.pdf
本发明公开了一种基于图像增强与NSCT的红外与和见光图像融合方法。该方法步骤如下:首先,利用均值滤波的方法获得红外图像透射率的粗估计,通过图像统计信息实现粗透射率的细化,依据大气散射物理模型实现红外图像的增强;然后,采用非下采样轮廓波变换对增强后的红外和可见光图像分别进行多尺度、多方向的分解,利用基于局部能量的规则融合低频系数,对高频系数采用系数值选大与局部均方差相结合的融合规则;最后,将得到的系数进行NSCT逆变换得到最终的融合图像。本发明不仅能凸显红外图像的目标信息,还能尽可能多的保留可见光图像丰富的