
长波线阵红外相机星上非均匀性实时校正方法.pdf

一吃****春艳

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
长波线阵红外相机星上非均匀性实时校正方法.pdf
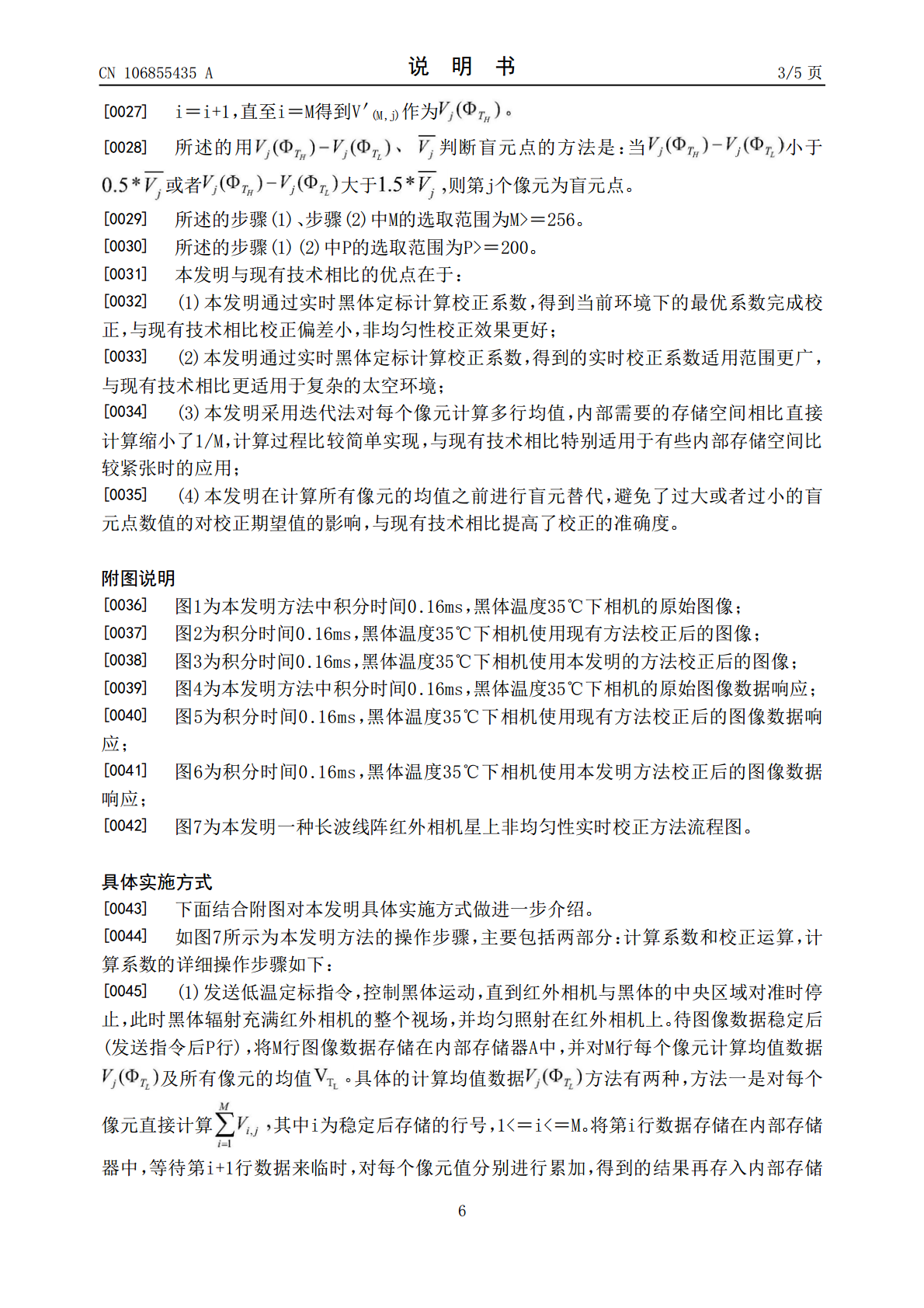
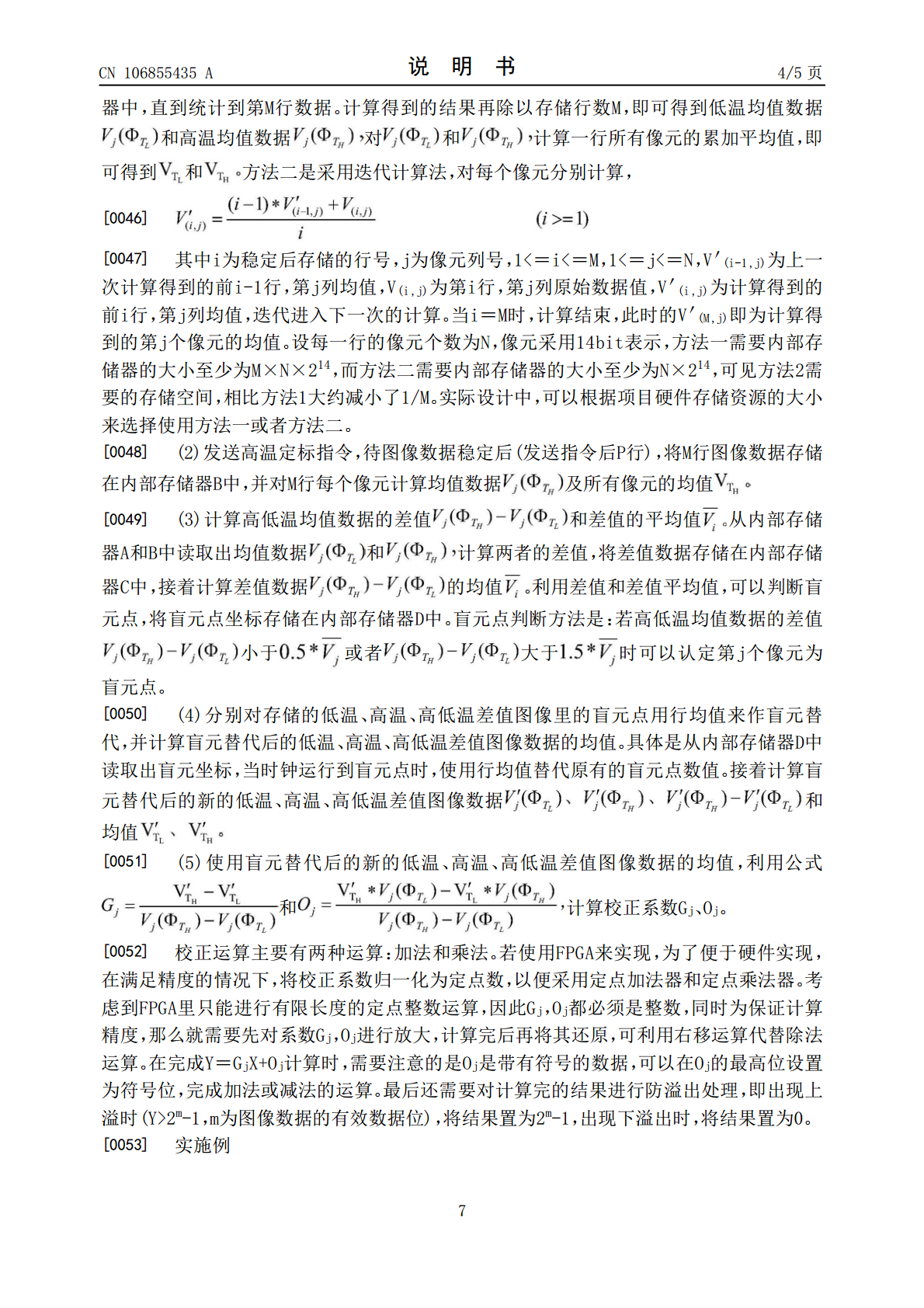
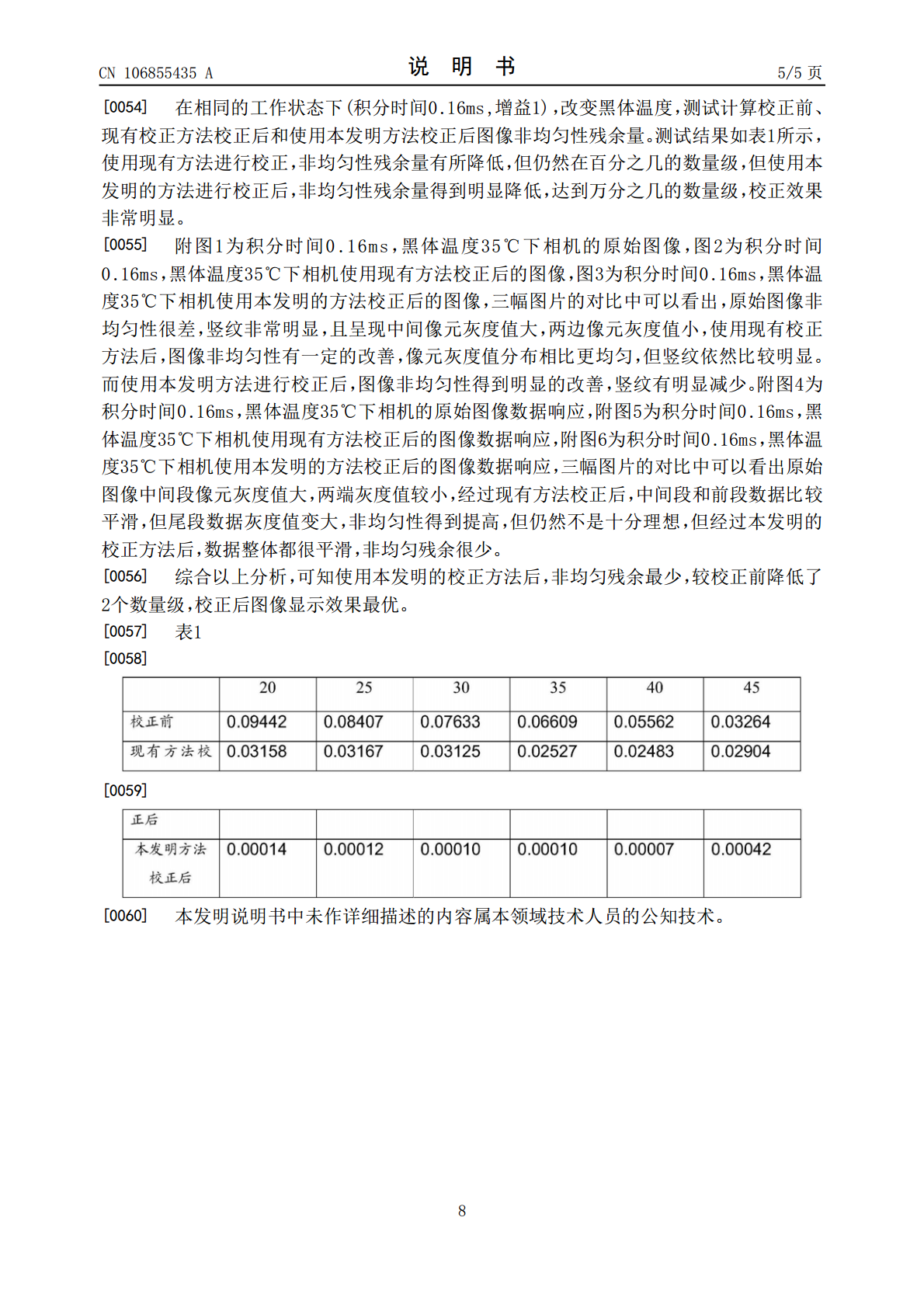
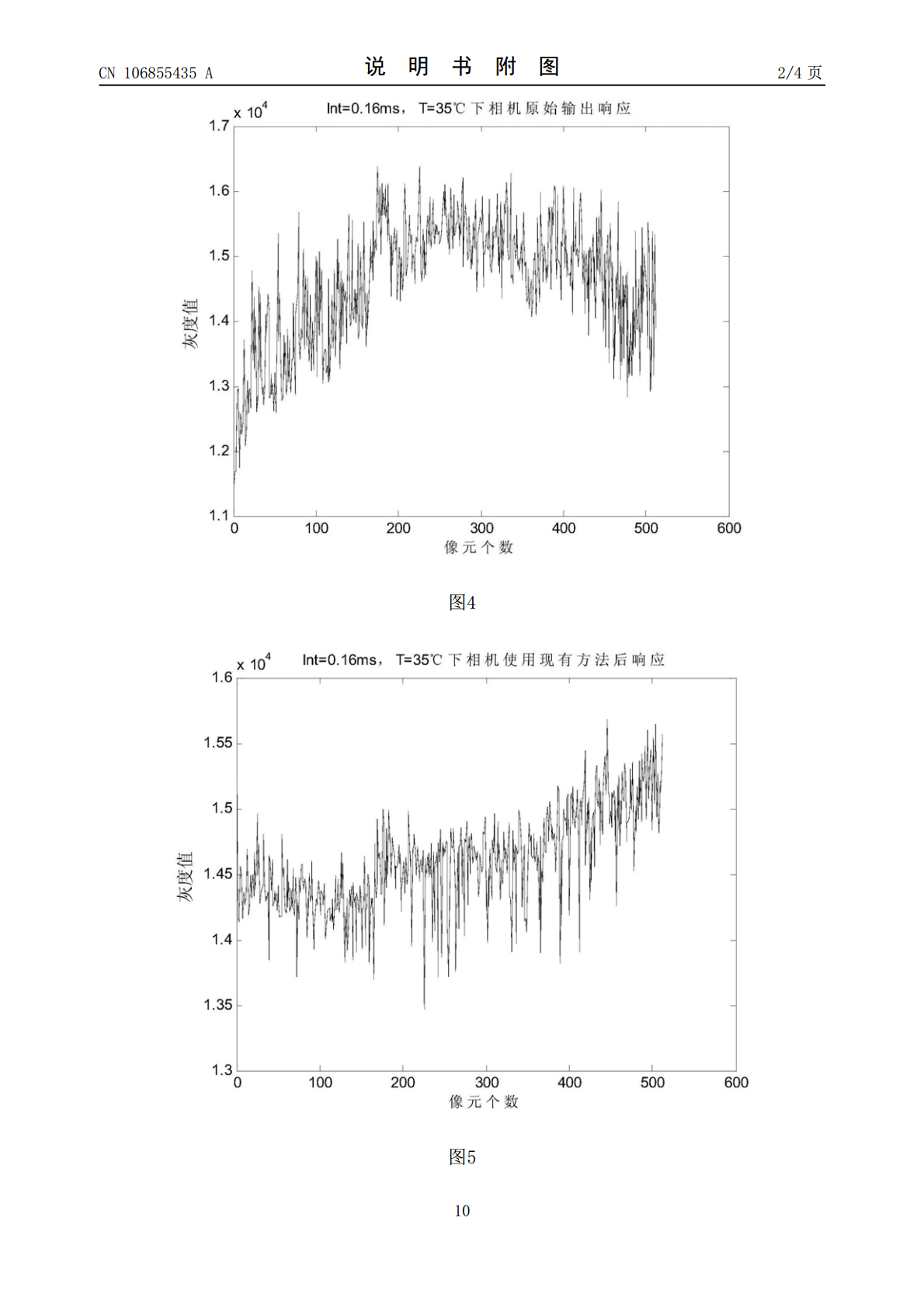
长波线阵红外相机星上非均匀性实时校正方法,首先依次发送低温、高温定标指令,控制黑体运动使红外相机与黑体中央区域对准,待温度稳定后分别将图像数据存储,然后计算每个像元均值数据及所有像元的均值,进而得到高低温均值数据的差值和差值的平均值,利用差值和差值平均值判断盲元点,最后对盲元点用行均值进行盲元替代,并计算盲元替代后的低温、高温、高低温差值图像数据的均值,进而得到校正系数,并对探测器输出的原始图像进行校正。本发明非均匀性实时校正方法与现有技术相比,减少通过地面定标进行非均匀性校正而导致的校正偏差,改善了红外

一种红外相机非均匀性校正装置.pdf
本发明的红外相机非均匀性校正装置涉及一种自动切入/切出装置,解决了现有技术采用手动进行红外相机非均匀性校正时使用条件受限的技术问题。本发明的校正装置包括基座(1)、圆管式电磁铁(2)、曲轴机构(3)、销钉(4)、闭合状态限位螺钉(5)、限位杆(6)、工作状态限位螺钉(7)和遮光板(8);本发明采用圆管式电磁铁为整个机构提供直线动力,通过由曲柄、曲轴和凸轮构成的曲轴机构间接带动遮光板实现光路的遮挡与开放。本发明结构简单,可靠实用,空间体积小,更适于空间严重受限的应用场所。

红外图像非均匀性校正.doc
改进的红外图像神经网络非均匀性校正算法摘要:红外焦平面阵列(IRFPA)像元响应存在不一致性,会严重影响红外成像系统成像的质量,实际应用中需要采用响应的非均匀性校正(NUC)技术。传统的神经网络校正算法在校正结果中存在图像模糊和伪像的问题,影响人们对于目标的观察。在分析了传统的神经网络性校正算法所出现问题原因的基础上,提出了有效的改进算法:用非线性滤波器代替传统算法中使用的均值滤波器。算法改进之后所得到的校正图像,不仅在清晰度方面有明显的改善,而且有效的消除了传统算法中存在伪像的问题。关键词:非均匀性;神
航空红外相机及其旋入式非均匀性校正机构.pdf
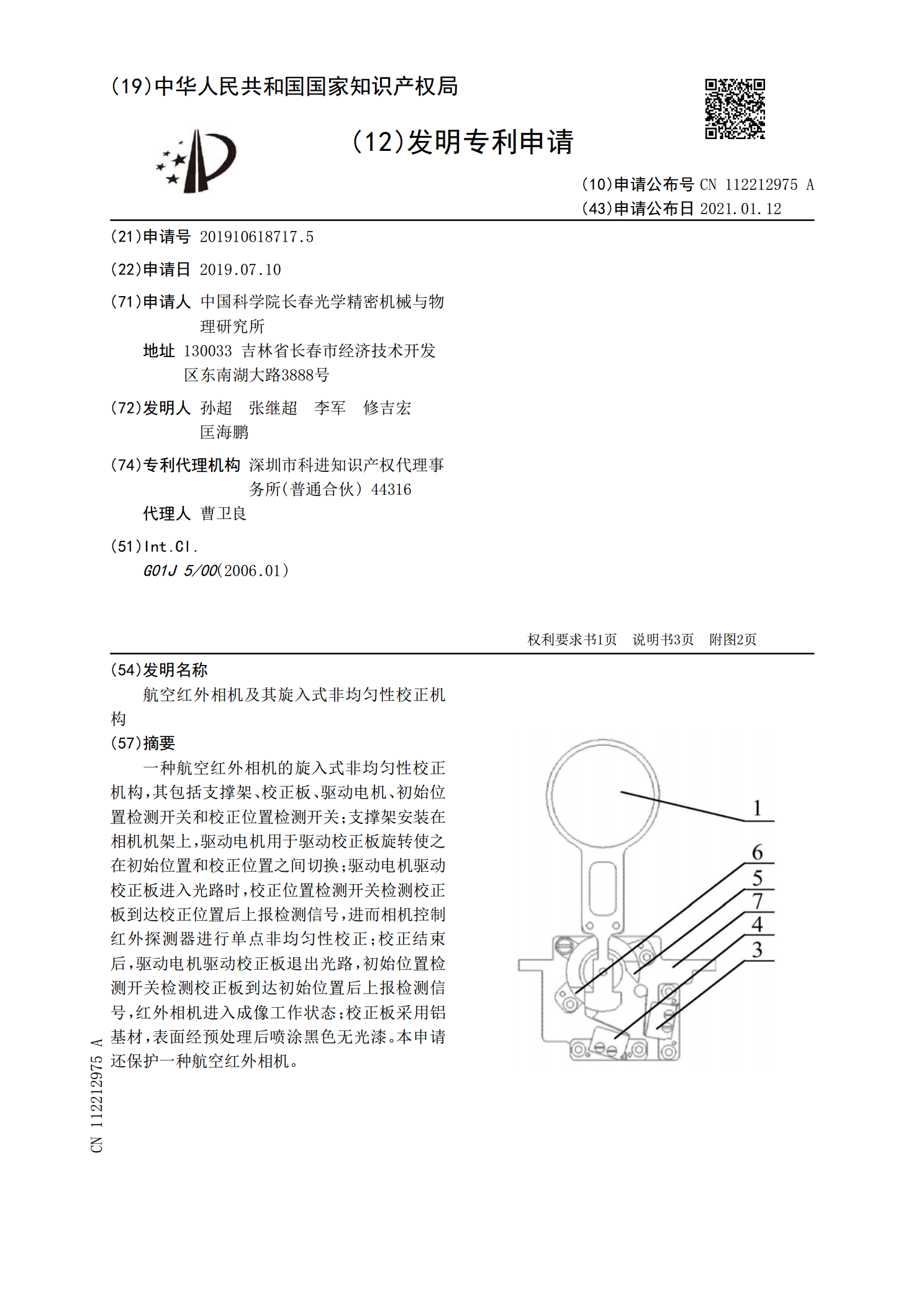
一种航空红外相机的旋入式非均匀性校正机构,其包括支撑架、校正板、驱动电机、初始位置检测开关和校正位置检测开关;支撑架安装在相机机架上,驱动电机用于驱动校正板旋转使之在初始位置和校正位置之间切换;驱动电机驱动校正板进入光路时,校正位置检测开关检测校正板到达校正位置后上报检测信号,进而相机控制红外探测器进行单点非均匀性校正;校正结束后,驱动电机驱动校正板退出光路,初始位置检测开关检测校正板到达初始位置后上报检测信号,红外相机进入成像工作状态;校正板采用铝基材,表面经预处理后喷涂黑色无光漆。本申请还保护一种航空

一种近红外图像的实时多点非均匀性校正装置及校正方法.pdf
本发明公开了一种近红外图像的实时多点非均匀性校正装置及校正方法,所述装置设有光学系统单元、液晶光阀、近红外焦平面探测器、电压控制器、驱动电路、A/D转换电路和处理器,处理器与驱动电路、A/D转换电路和电压控制器均相连,近红外焦平面探测器与驱动电路和A/D转换电路均连接,液晶光阀设置在近红外焦平面探测器的近红外焦平面的靶面上,光学系统单元设置在液晶光阀正对场景目标的前方,液晶光阀与电压控制器连接。这种装置成本低、容易实现,这种方法能克服近红外焦平面阵列探测器像元的响应漂移并对其进行高速、实时校正。