
星载滑动聚束SAR卫星姿态和PRF序列设计方法.pdf

努力****冰心

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
星载滑动聚束SAR卫星姿态和PRF序列设计方法.pdf
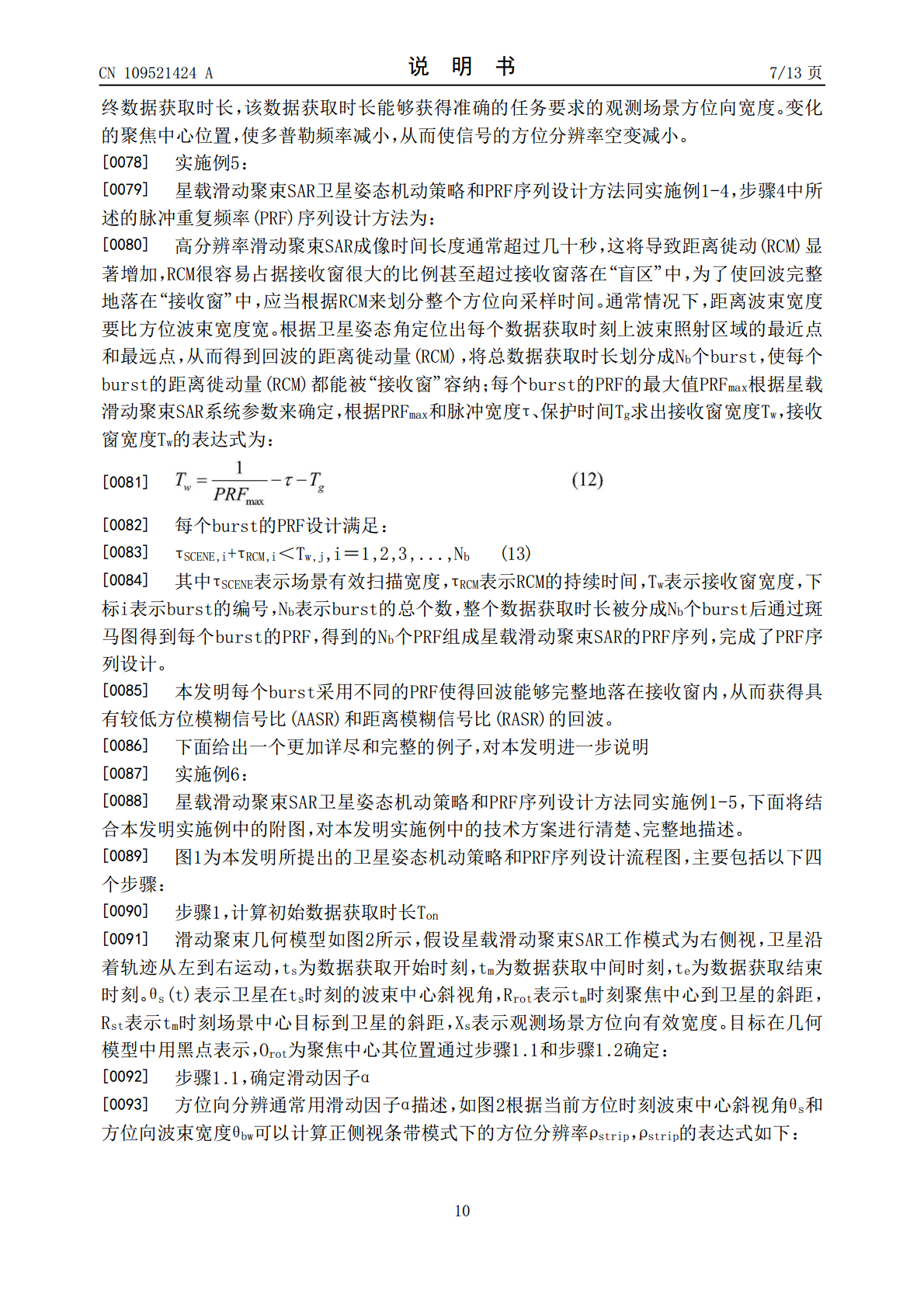
本发明公开了一种星载滑动聚束SAR卫星姿态和PRF序列设计方法,解决了星载滑动聚束SAR照射场景弯曲、方位分辨率空变明显和回波落在盲区中的问题。实现步骤为:计算初始数据获取时长;根据波束指向和约束多普勒中心频率距离空变最小,确定卫星姿态角;确定最终数据获取时长;将数据获取时长划分为多个burst,每个burst采用不同的PRF,完成PRF序列设计。本发明增加对横滚角的控制,避免照射场景弯曲;聚焦中心位置变化,方位分辨率空变小;PRF变化,避免回波落于盲区。本发明照射场景不弯曲、方位分辨率空变小、回波能够全
基于多频子带并发的星载滑动聚束MIMO-SAR成像方法.pdf
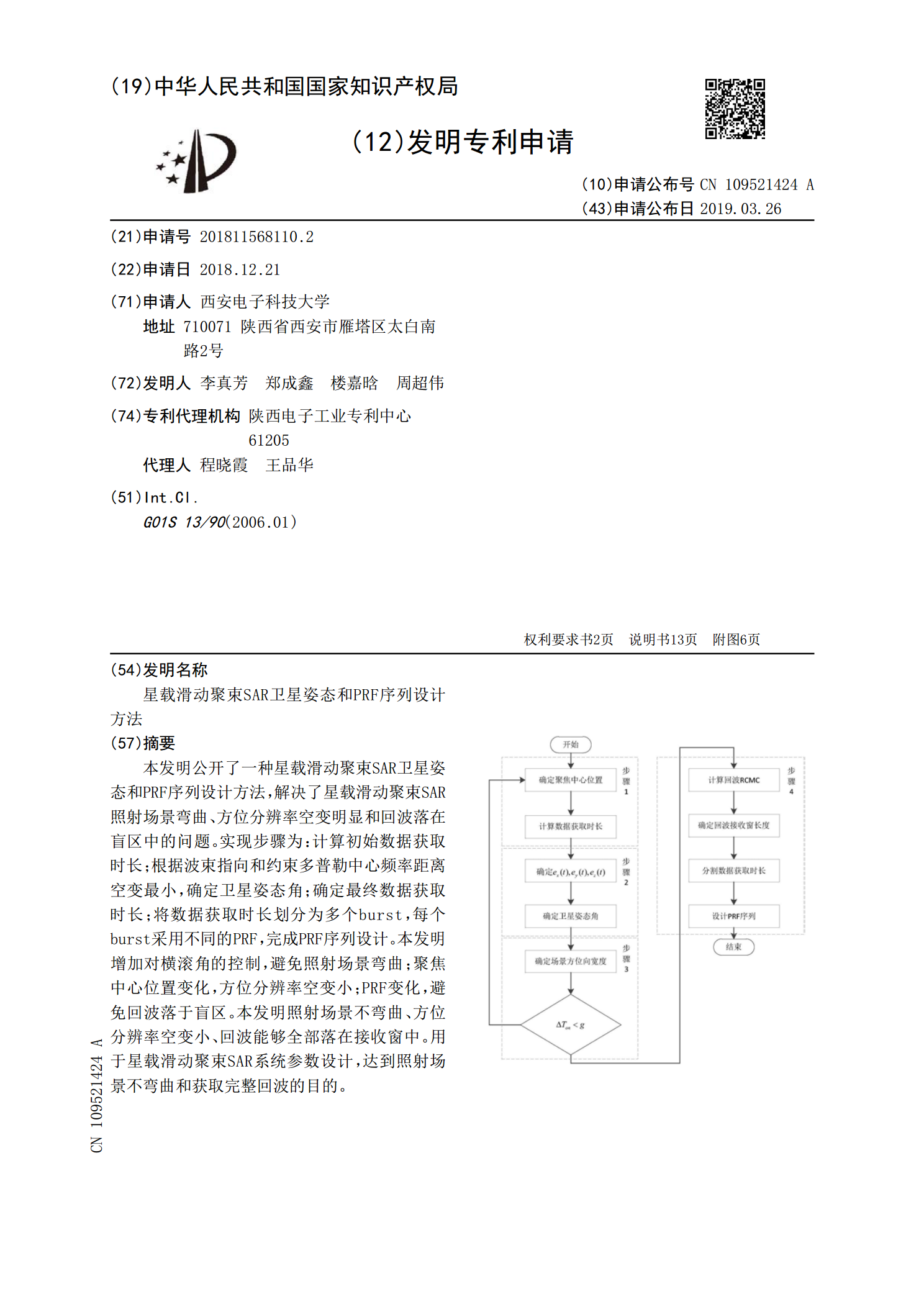
本发明公开了一种基于多频子带并发的星载滑动聚束MIMO‑SAR成像方法,能够在降低雷达系统实现难度与成本的同时获得两维高分辨率、宽测绘带以及更高的信噪比。实现过程如下:(1)提出了一种通道采样位置误差校正方法。(2)提出了一种多子带方位去斜方法。既能降低信号的多普勒带宽,使其小于系统的等效PRF,又能保证方位去斜后子带信号间的距离历程差异仍然可以方便地得到补偿。(3)对传统的频域子带拼接方法进行了改进,使其既能避免距离向插值,又对系统参数没有特别的要求,具有更强的适应性。
星载SAR变PRF跨盲区技术机载SAR验证方法和装置.pdf
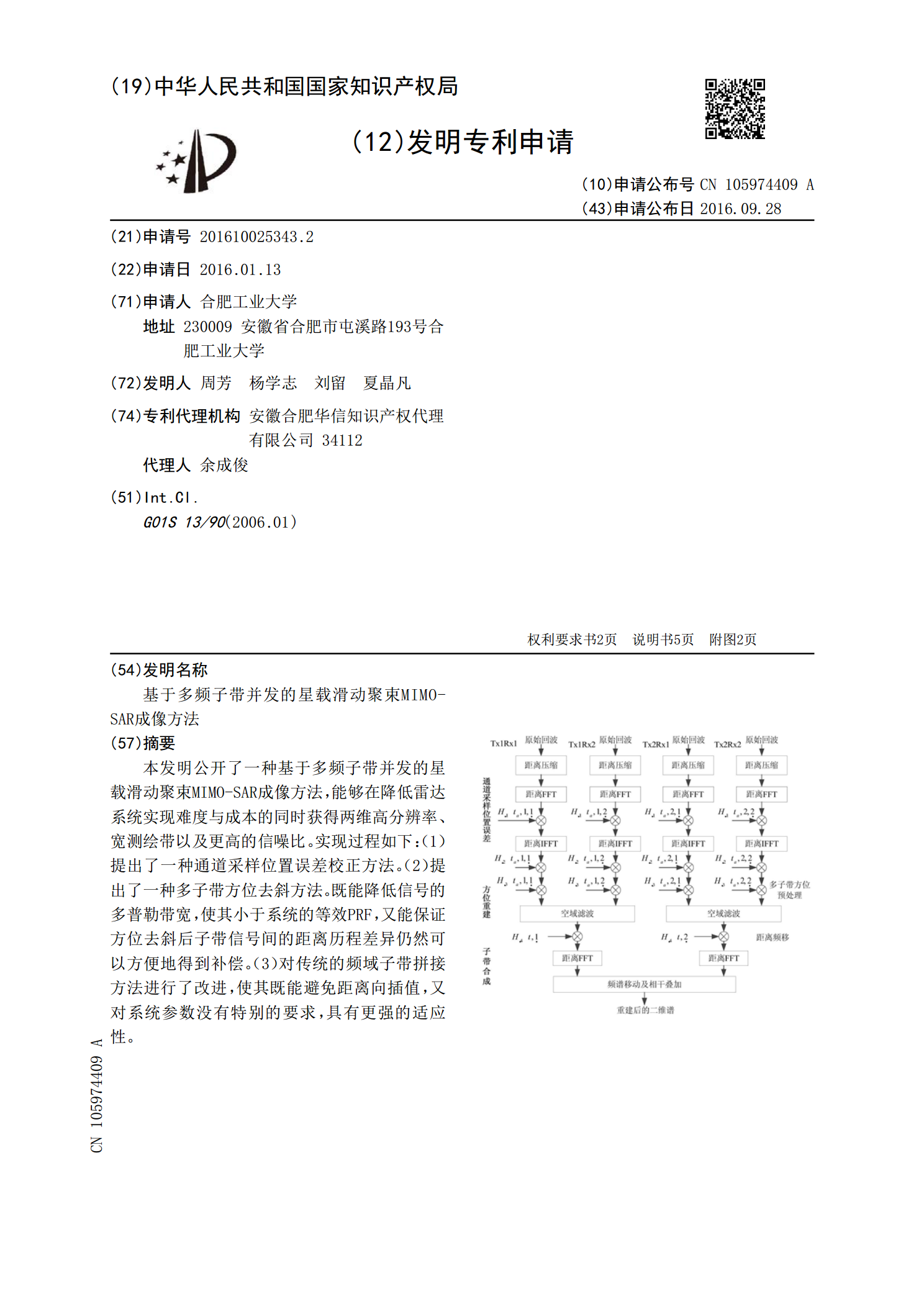
本申请实施例公开了一种星载SAR变PRF跨盲区技术机载SAR验证方法及装置,所述方法包括:按照第i频率向待测对象发射第i脉冲;基于第i脉冲对应的第i回波窗接收待测对象返回的第i回波信号,同时,按照第(i+1)频率继续向待测对象发射第(i+1)脉冲;其中,第(i+1)脉冲对应的发射窗与第i回波窗重叠;重复执行回波信号的接收处理和脉冲的发射处理,直至基于第(i+n)脉冲对应的第(i+n)回波窗接收待测对象返回的第(i+n)回波信号;其中,n为大于1的整数,第(i+n)脉冲对应的第(i+n)频率等于频率上限阈值

亚米分辨率星载滑动聚束SAR成像算法研究的中期报告.docx
亚米分辨率星载滑动聚束SAR成像算法研究的中期报告本文旨在介绍亚米分辨率星载滑动聚束SAR成像算法的中期研究成果,主要包括算法原理、实验设计、实验结果及分析等内容。一、算法原理亚米分辨率星载滑动聚束SAR成像算法基于滑动聚束SAR的基础上,通过合理地设计聚束数量和聚束形状,实现了高分辨率成像。其主要流程如下:1.数据采集:星载SAR系统向地面发送并接收回波信号。2.数据预处理:包括去斜率校正、多普勒校正、方位压缩等。3.滑动聚束:将接收到的信号分为若干分段,对每一段信号分别进行频域聚束。4.聚束成像:将每

斜视滑动聚束SAR的子孔径波数域成像方法.pdf
本发明公开了一种斜视滑动聚束SAR的子孔径波数域成像方法,针对斜视情况对传统滑动聚束SAR子孔径法进行了改进。首先将全孔径重叠划分子孔径,将适用于斜视情况的扩展波数域方法作为子孔径基本成像方法,然后在距离多普勒域采用改进的BAS方法完成方位向处理并实现子孔径拼接,得到斜视情况下的全孔径图像。本发明克服了斜视滑动聚束SAR存在的数据量大、方位多普勒中心非零、以及多普勒带宽过大的问题,具有较大的实用价值。