
一种基于激光雷达的地面分割方法、装置及存储介质.pdf

是你****优呀

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于激光雷达的地面分割方法、装置及存储介质.pdf
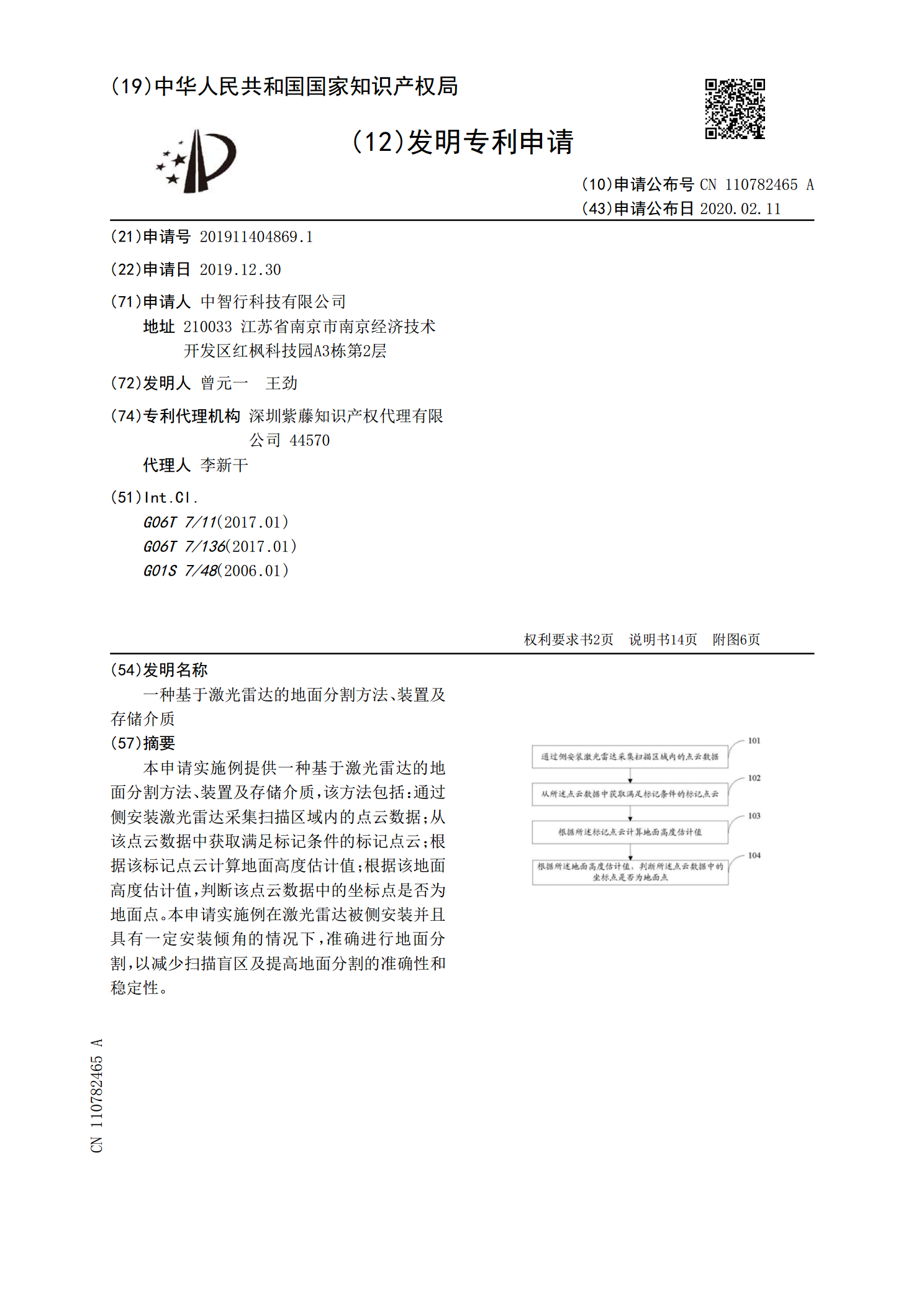
本申请实施例提供一种基于激光雷达的地面分割方法、装置及存储介质,该方法包括:通过侧安装激光雷达采集扫描区域内的点云数据;从该点云数据中获取满足标记条件的标记点云;根据该标记点云计算地面高度估计值;根据该地面高度估计值,判断该点云数据中的坐标点是否为地面点。本申请实施例在激光雷达被侧安装并且具有一定安装倾角的情况下,准确进行地面分割,以减少扫描盲区及提高地面分割的准确性和稳定性。
一种激光雷达的标定方法、装置及存储介质.pdf
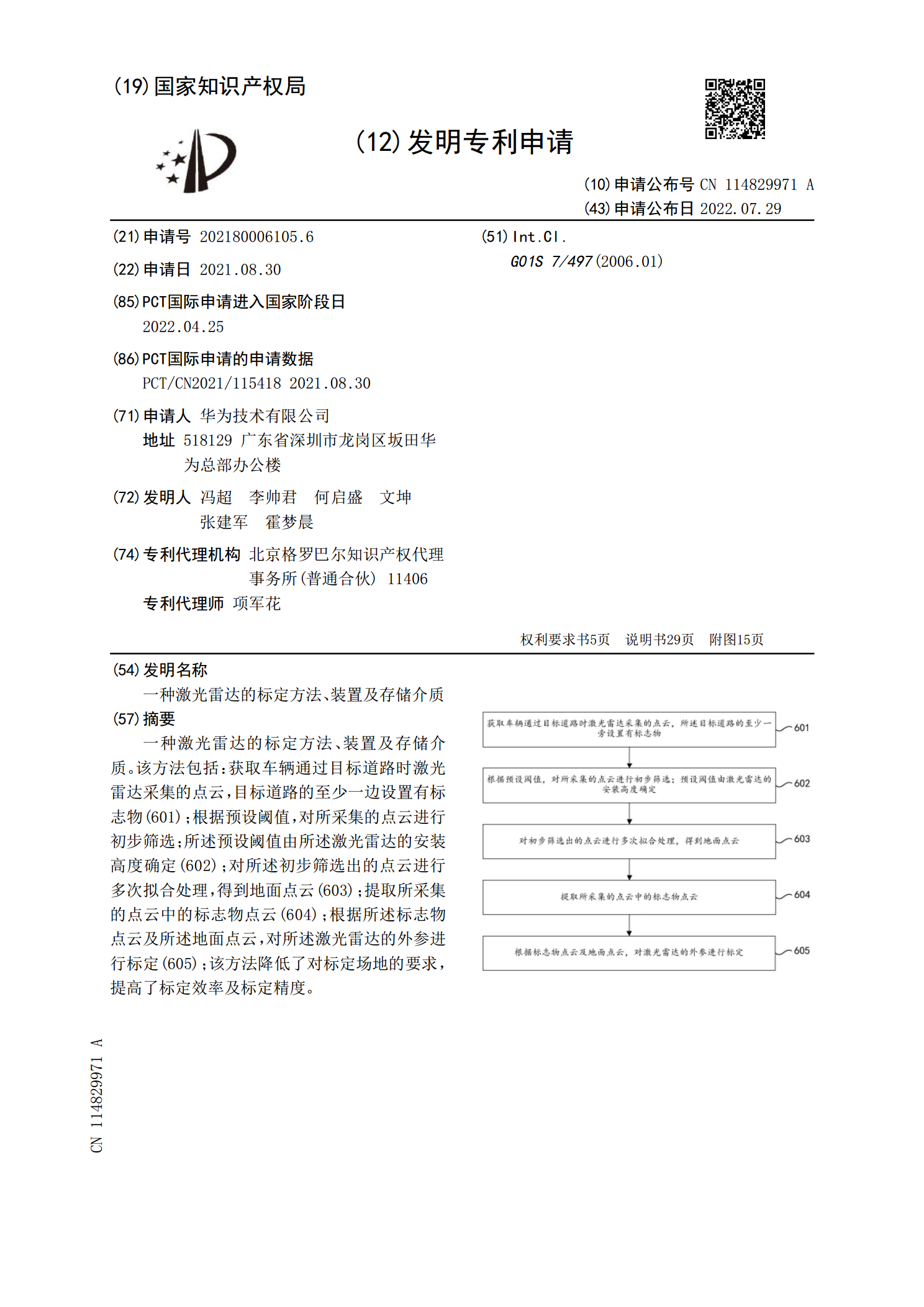
一种激光雷达的标定方法、装置及存储介质。该方法包括:获取车辆通过目标道路时激光雷达采集的点云,目标道路的至少一边设置有标志物(601);根据预设阈值,对所采集的点云进行初步筛选;所述预设阈值由所述激光雷达的安装高度确定(602);对所述初步筛选出的点云进行多次拟合处理,得到地面点云(603);提取所采集的点云中的标志物点云(604);根据所述标志物点云及所述地面点云,对所述激光雷达的外参进行标定(605);该方法降低了对标定场地的要求,提高了标定效率及标定精度。
一种激光雷达测距方法、装置、激光雷达及存储介质.pdf
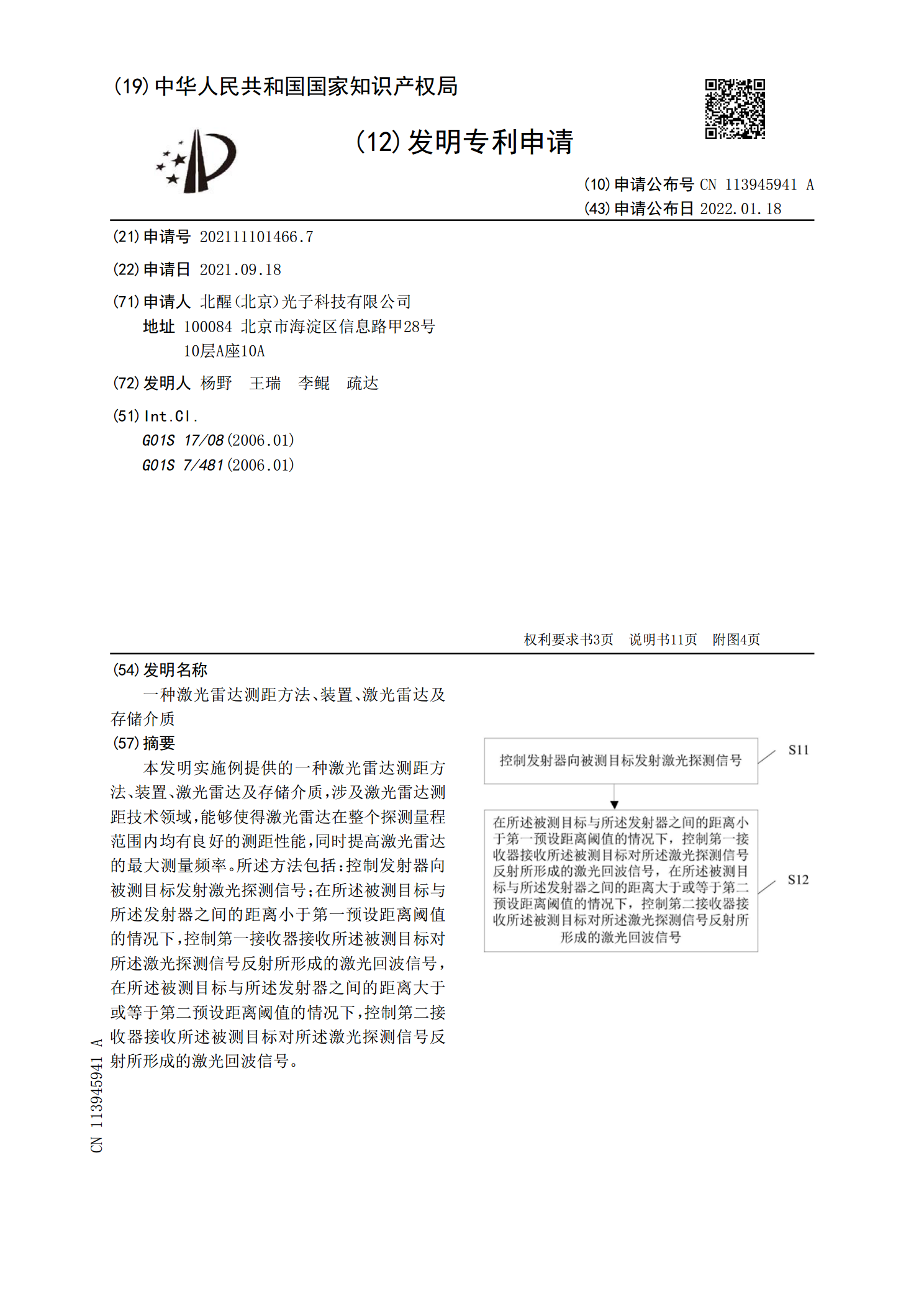
本发明实施例提供的一种激光雷达测距方法、装置、激光雷达及存储介质,涉及激光雷达测距技术领域,能够使得激光雷达在整个探测量程范围内均有良好的测距性能,同时提高激光雷达的最大测量频率。所述方法包括:控制发射器向被测目标发射激光探测信号;在所述被测目标与所述发射器之间的距离小于第一预设距离阈值的情况下,控制第一接收器接收所述被测目标对所述激光探测信号反射所形成的激光回波信号,在所述被测目标与所述发射器之间的距离大于或等于第二预设距离阈值的情况下,控制第二接收器接收所述被测目标对所述激光探测信号反射所形成的激光回
基于象限分割的布线方法、装置、设备及存储介质.pdf
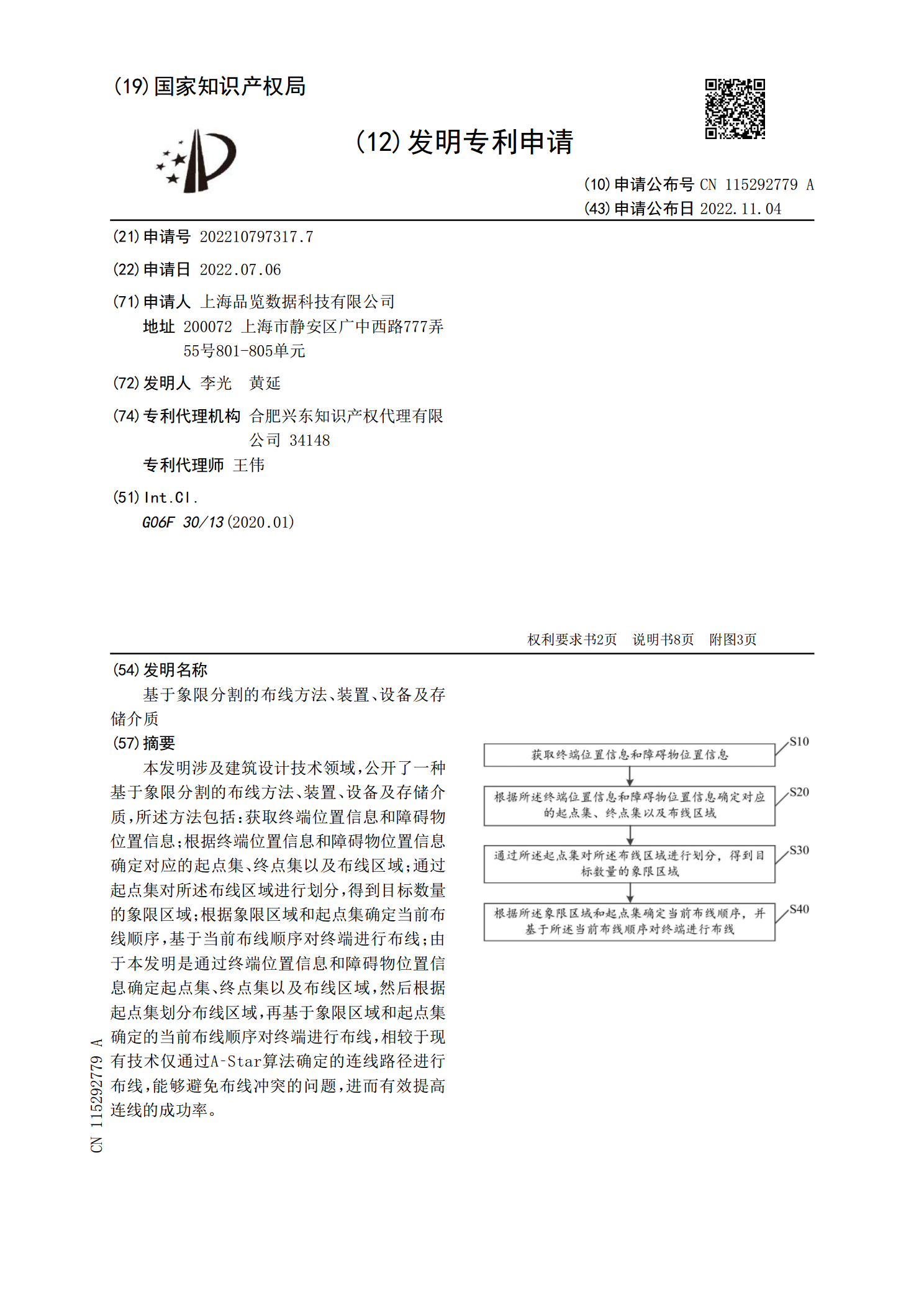
本发明涉及建筑设计技术领域,公开了一种基于象限分割的布线方法、装置、设备及存储介质,所述方法包括:获取终端位置信息和障碍物位置信息;根据终端位置信息和障碍物位置信息确定对应的起点集、终点集以及布线区域;通过起点集对所述布线区域进行划分,得到目标数量的象限区域;根据象限区域和起点集确定当前布线顺序,基于当前布线顺序对终端进行布线;由于本发明是通过终端位置信息和障碍物位置信息确定起点集、终点集以及布线区域,然后根据起点集划分布线区域,再基于象限区域和起点集确定的当前布线顺序对终端进行布线,相较于现有技术仅通过
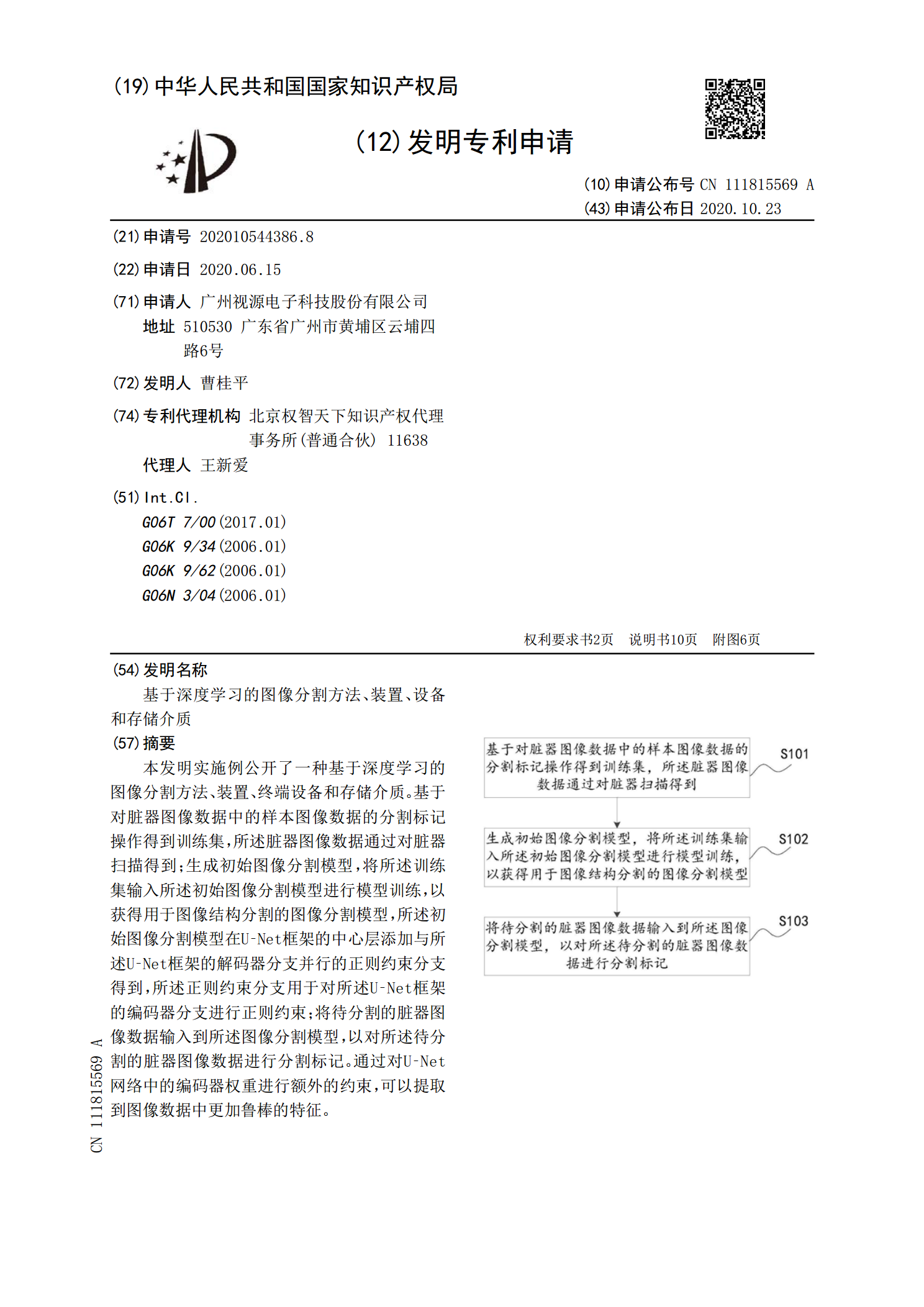
基于深度学习的图像分割方法、装置、设备和存储介质.pdf
本发明实施例公开了一种基于深度学习的图像分割方法、装置、终端设备和存储介质。基于对脏器图像数据中的样本图像数据的分割标记操作得到训练集,所述脏器图像数据通过对脏器扫描得到;生成初始图像分割模型,将所述训练集输入所述初始图像分割模型进行模型训练,以获得用于图像结构分割的图像分割模型,所述初始图像分割模型在U‑Net框架的中心层添加与所述U‑Net框架的解码器分支并行的正则约束分支得到,所述正则约束分支用于对所述U‑Net框架的编码器分支进行正则约束;将待分割的脏器图像数据输入到所述图像分割模型,以对所述待分