
基于深度学习的智能障碍物预警拐杖及其预警方法.pdf

一条****贺6

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度学习的智能障碍物预警拐杖及其预警方法.pdf
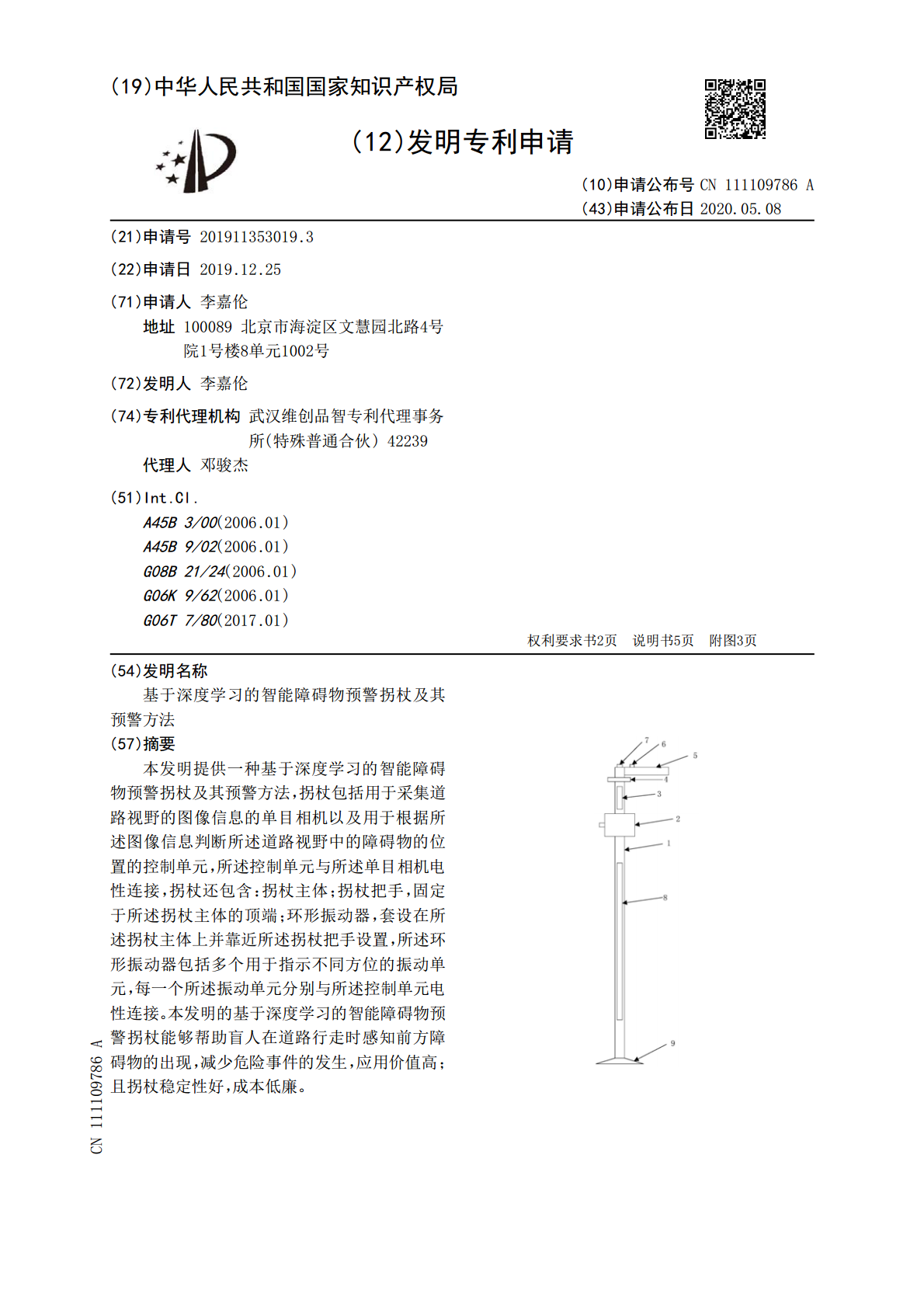
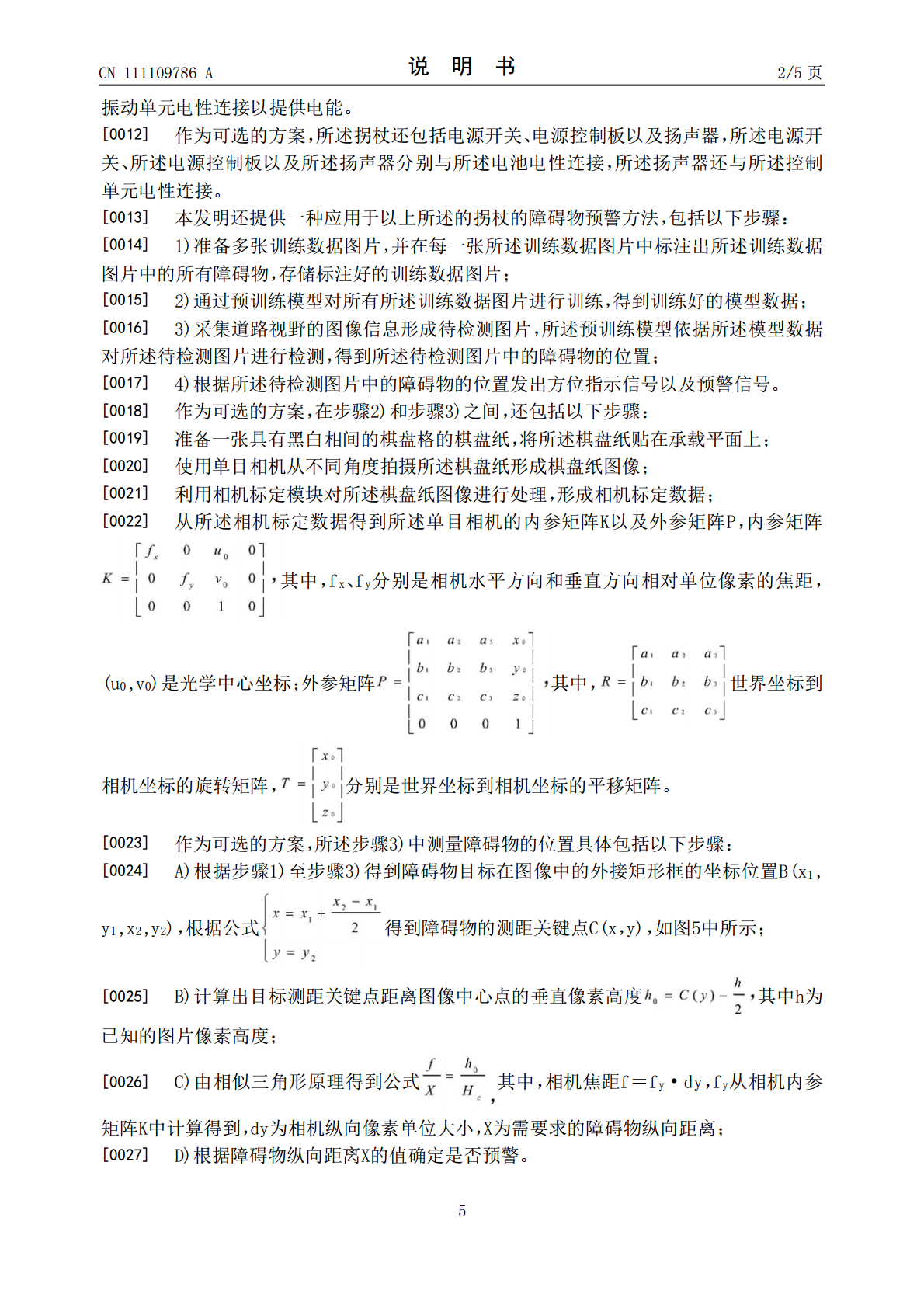
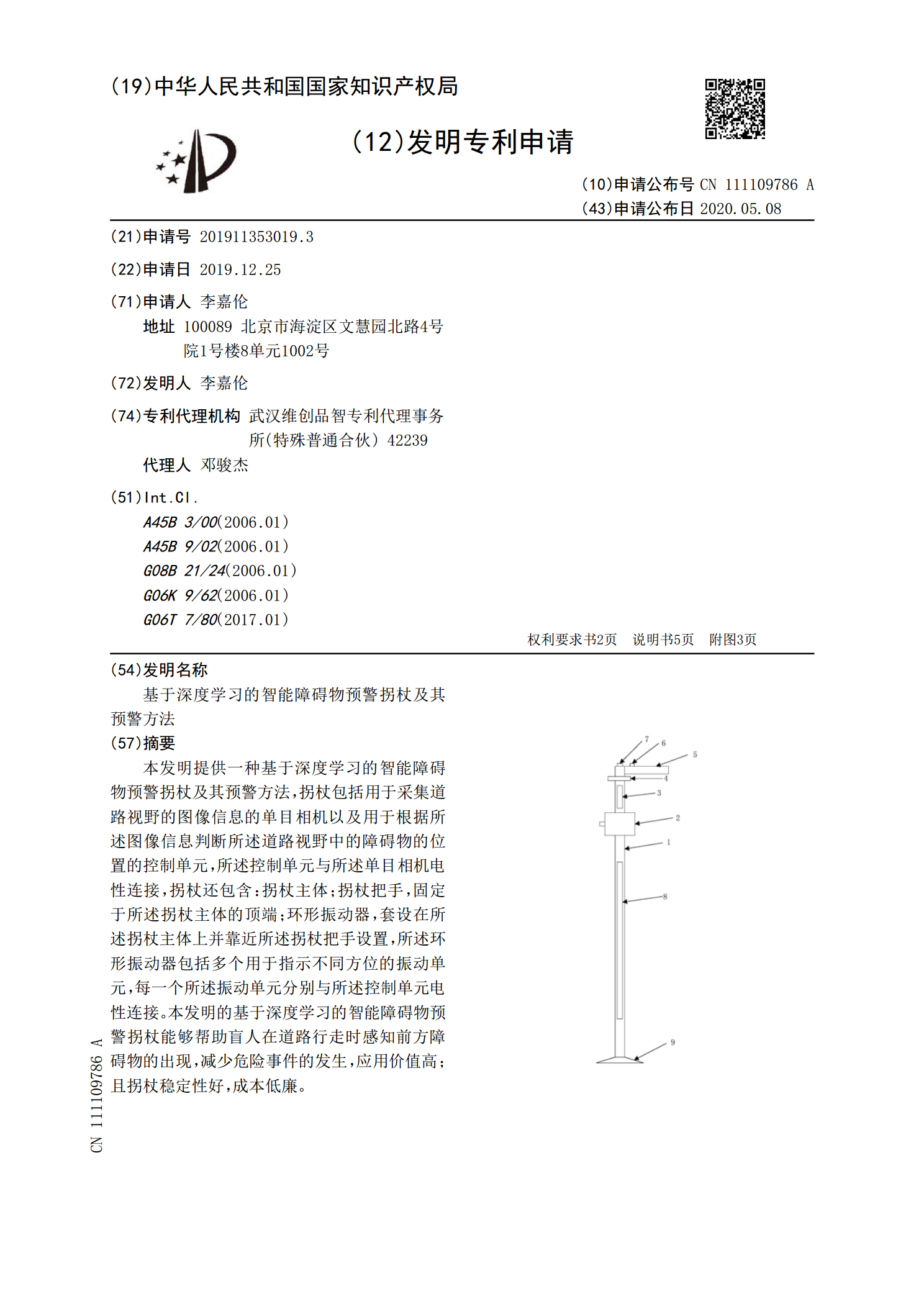
本发明提供一种基于深度学习的智能障碍物预警拐杖及其预警方法,拐杖包括用于采集道路视野的图像信息的单目相机以及用于根据所述图像信息判断所述道路视野中的障碍物的位置的控制单元,所述控制单元与所述单目相机电性连接,拐杖还包含:拐杖主体;拐杖把手,固定于所述拐杖主体的顶端;环形振动器,套设在所述拐杖主体上并靠近所述拐杖把手设置,所述环形振动器包括多个用于指示不同方位的振动单元,每一个所述振动单元分别与所述控制单元电性连接。本发明的基于深度学习的智能障碍物预警拐杖能够帮助盲人在道路行走时感知前方障碍物的出现,减少危
基于深度学习的预警制动方法.pdf
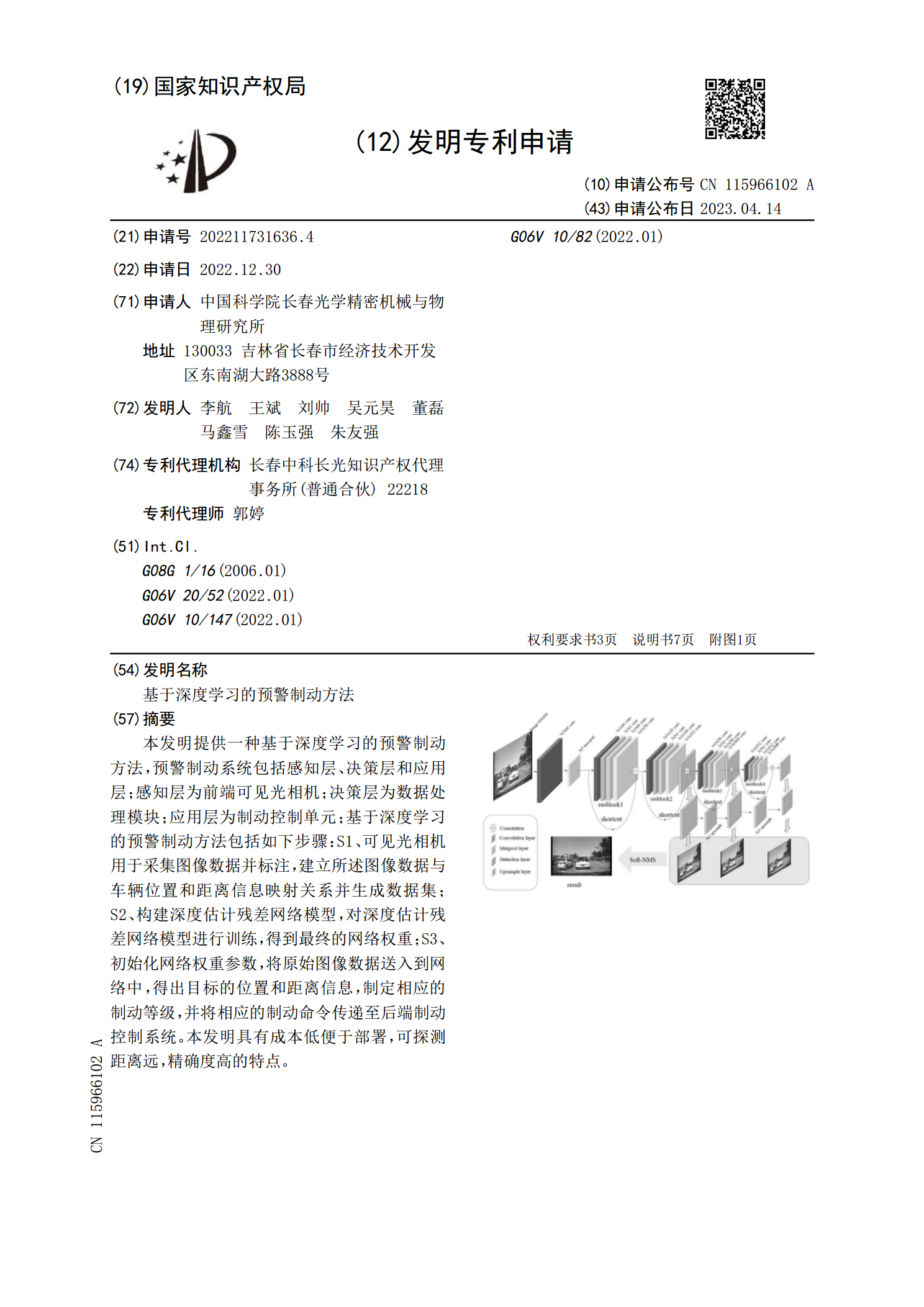
本发明提供一种基于深度学习的预警制动方法,预警制动系统包括感知层、决策层和应用层;感知层为前端可见光相机;决策层为数据处理模块;应用层为制动控制单元;基于深度学习的预警制动方法包括如下步骤:S1、可见光相机用于采集图像数据并标注,建立所述图像数据与车辆位置和距离信息映射关系并生成数据集;S2、构建深度估计残差网络模型,对深度估计残差网络模型进行训练,得到最终的网络权重;S3、初始化网络权重参数,将原始图像数据送入到网络中,得出目标的位置和距离信息,制定相应的制动等级,并将相应的制动命令传递至后端制动控制系
基于深度学习的猪场生物安全智能预警方法.pdf
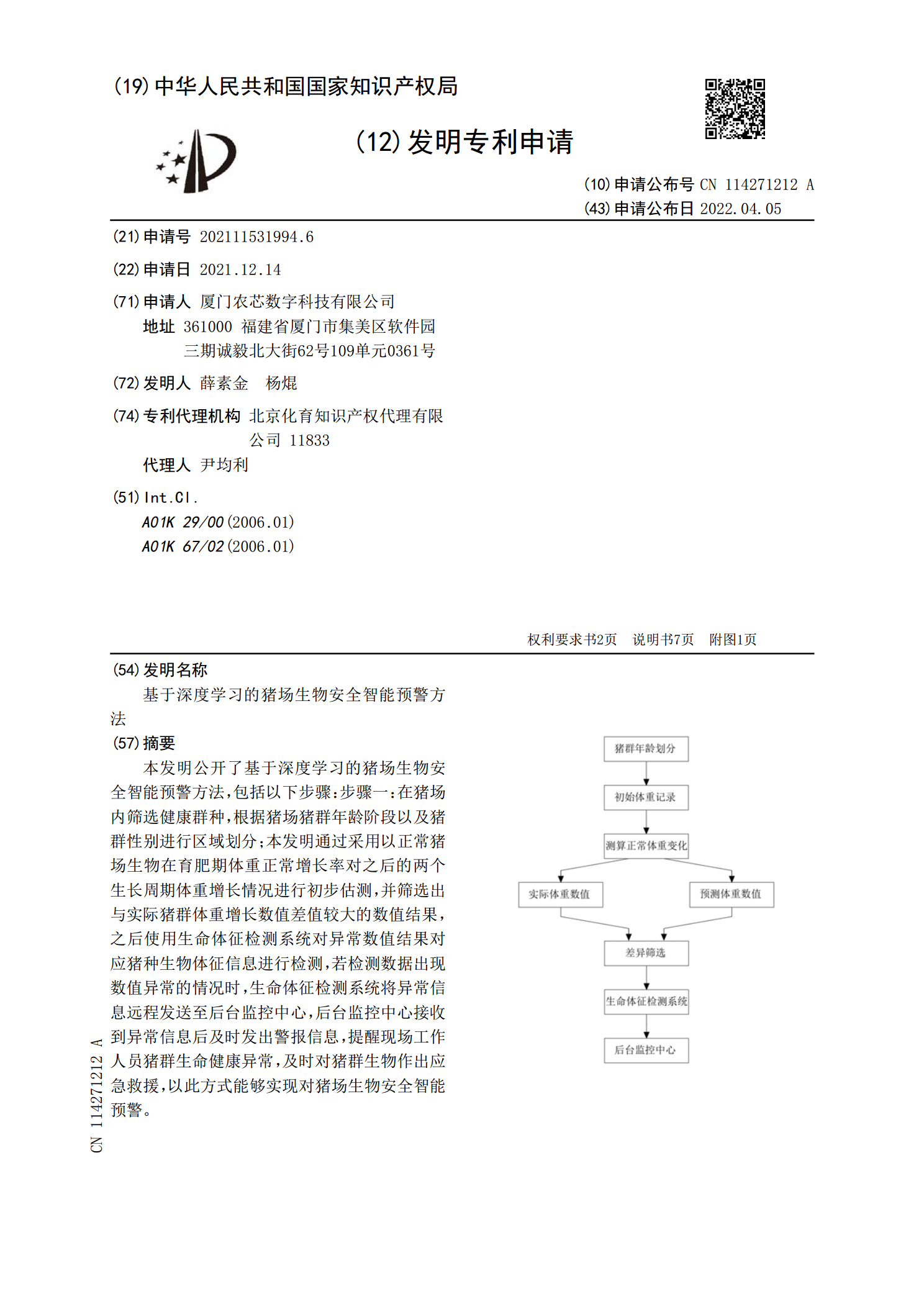
本发明公开了基于深度学习的猪场生物安全智能预警方法,包括以下步骤:步骤一:在猪场内筛选健康群种,根据猪场猪群年龄阶段以及猪群性别进行区域划分;本发明通过采用以正常猪场生物在育肥期体重正常增长率对之后的两个生长周期体重增长情况进行初步估测,并筛选出与实际猪群体重增长数值差值较大的数值结果,之后使用生命体征检测系统对异常数值结果对应猪种生物体征信息进行检测,若检测数据出现数值异常的情况时,生命体征检测系统将异常信息远程发送至后台监控中心,后台监控中心接收到异常信息后及时发出警报信息,提醒现场工作人员猪群生命健
障碍物预警方法和障碍物预警装置.pdf
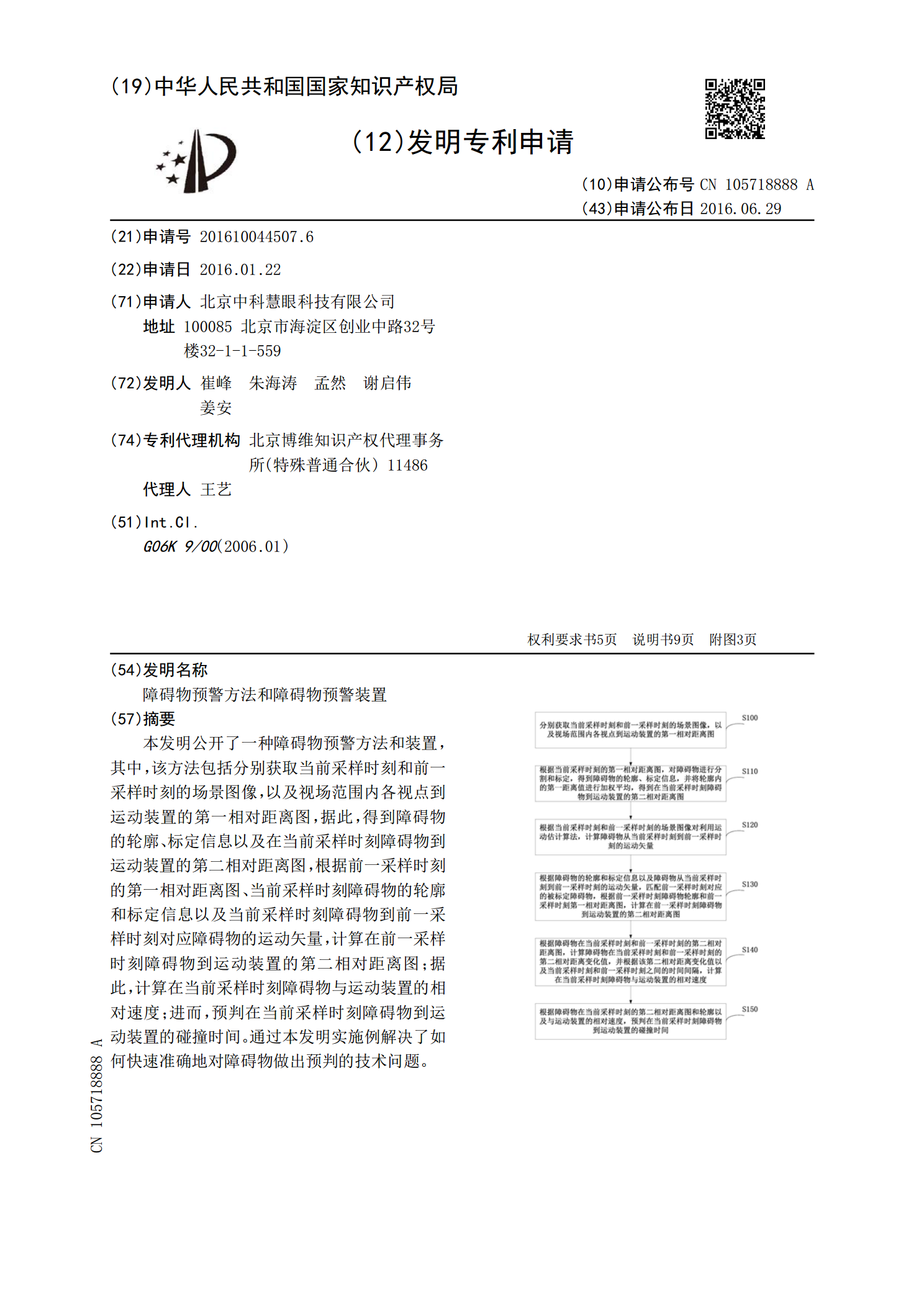
本发明公开了一种障碍物预警方法和装置,其中,该方法包括分别获取当前采样时刻和前一采样时刻的场景图像,以及视场范围内各视点到运动装置的第一相对距离图,据此,得到障碍物的轮廓、标定信息以及在当前采样时刻障碍物到运动装置的第二相对距离图,根据前一采样时刻的第一相对距离图、当前采样时刻障碍物的轮廓和标定信息以及当前采样时刻障碍物到前一采样时刻对应障碍物的运动矢量,计算在前一采样时刻障碍物到运动装置的第二相对距离图;据此,计算在当前采样时刻障碍物与运动装置的相对速度;进而,预判在当前采样时刻障碍物到运动装置的碰撞时

基于深度学习的电梯故障预警研究与应用.pdf
ELECTRONICSWORLD・技术交流基于深度学习的电梯故障预警研究与应用兰州资源环境职业技术学院车明浪杨添玺准确可靠快速的故障预警方法是电梯安全运行的关键。针对电隐含层转发到输出层的节点,由输出层计算隐含神经元的线性和。梯故障预警问题,为有效预防和减少电梯安全隐患,本文所提CKF-该网络能够较为准确的预测出运行中系统中出现的故障。图1为RBF预测方法具有更精确的预测结果和更短的预测时间。对于电梯及RBF神经网络模型结构。相关特种设备的故障预警系统的设计与开发具有一定的参考意义。随着我国经济的快速发展