
一种变电站在线智能巡视系统及方法.pdf

是翠****ng


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种变电站在线智能巡视系统及方法.pdf
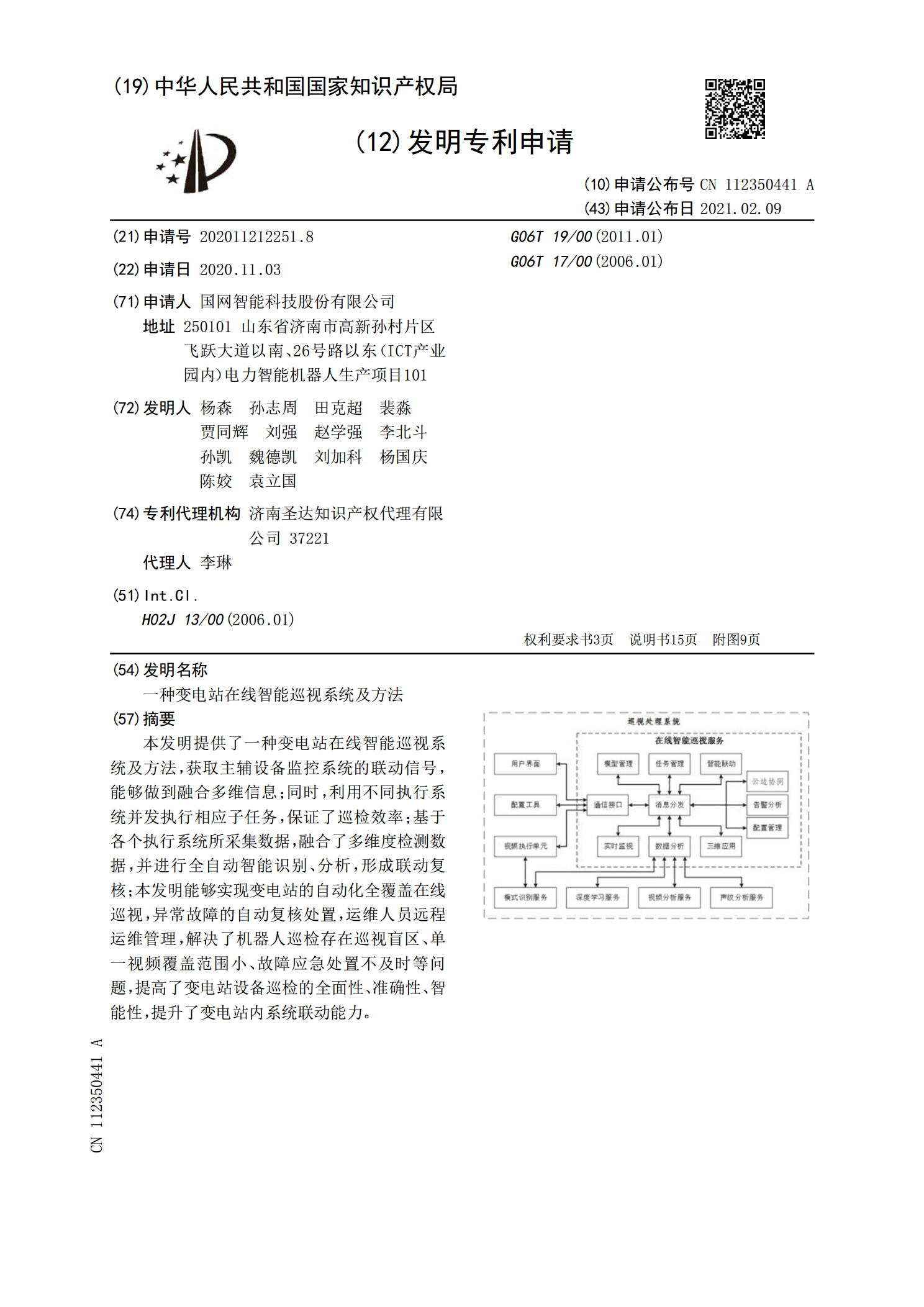
本发明提供了一种变电站在线智能巡视系统及方法,获取主辅设备监控系统的联动信号,能够做到融合多维信息;同时,利用不同执行系统并发执行相应子任务,保证了巡检效率;基于各个执行系统所采集数据,融合了多维度检测数据,并进行全自动智能识别、分析,形成联动复核;本发明能够实现变电站的自动化全覆盖在线巡视,异常故障的自动复核处置,运维人员远程运维管理,解决了机器人巡检存在巡视盲区、单一视频覆盖范围小、故障应急处置不及时等问题,提高了变电站设备巡检的全面性、准确性、智能性,提升了变电站内系统联动能力。
变电站在线智能巡视集中监控系统及方法.pdf
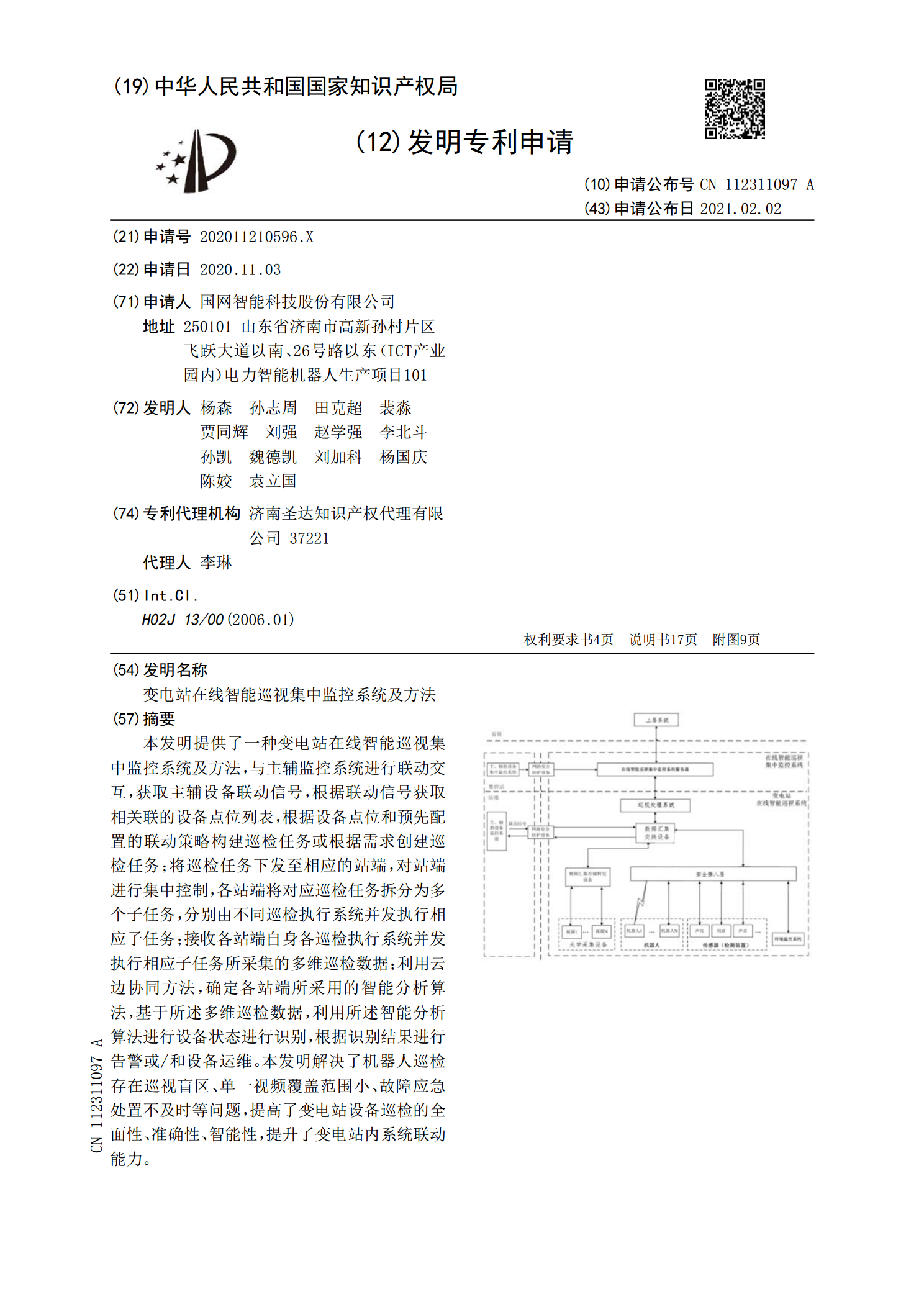
本发明提供了一种变电站在线智能巡视集中监控系统及方法,与主辅监控系统进行联动交互,获取主辅设备联动信号,根据联动信号获取相关联的设备点位列表,根据设备点位和预先配置的联动策略构建巡检任务或根据需求创建巡检任务;将巡检任务下发至相应的站端,对站端进行集中控制,各站端将对应巡检任务拆分为多个子任务,分别由不同巡检执行系统并发执行相应子任务;接收各站端自身各巡检执行系统并发执行相应子任务所采集的多维巡检数据;利用云边协同方法,确定各站端所采用的智能分析算法,基于所述多维巡检数据,利用所述智能分析算法进行设备状态
三维在线智能巡视系统及其方法.pdf
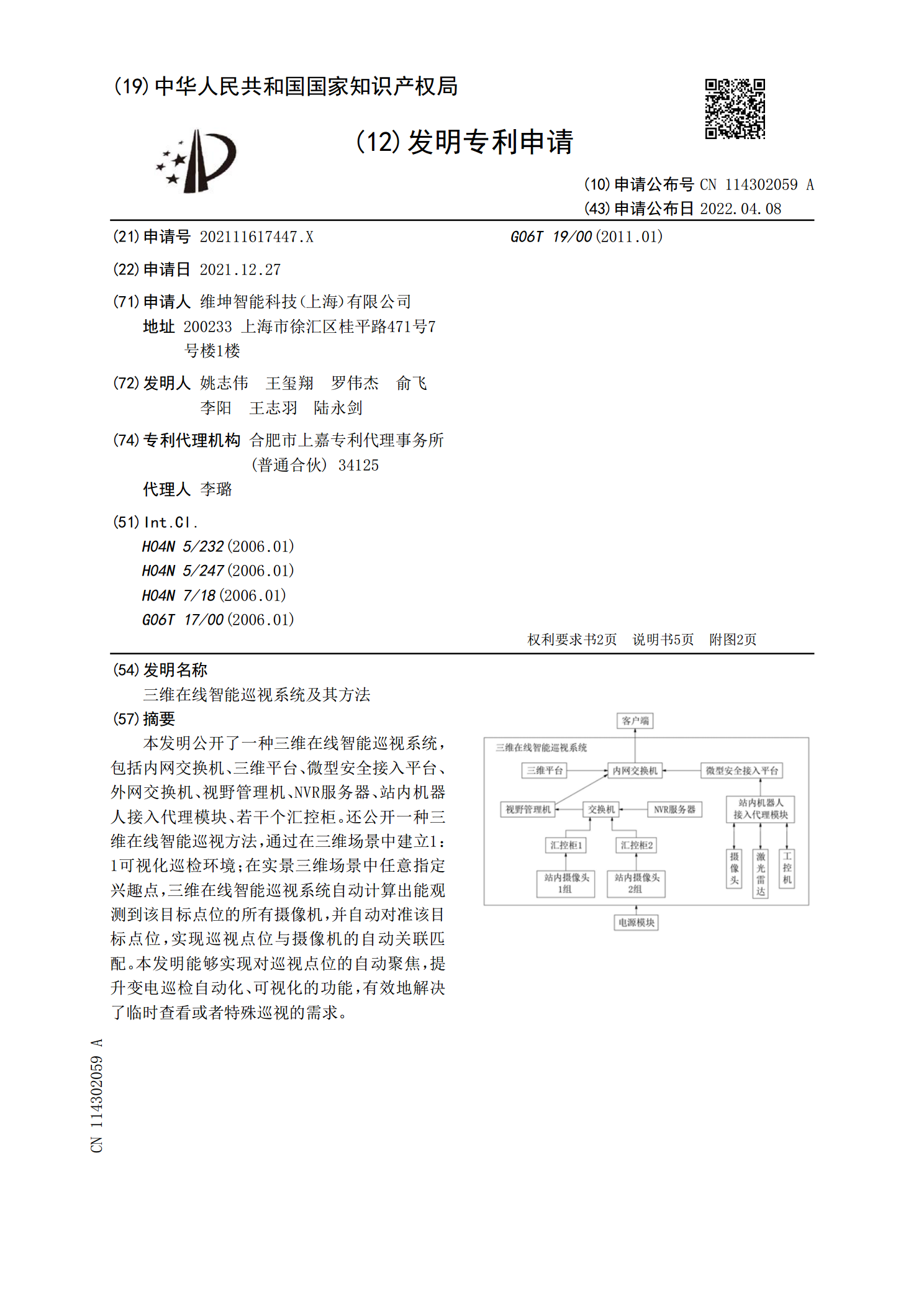
本发明公开了一种三维在线智能巡视系统,包括内网交换机、三维平台、微型安全接入平台、外网交换机、视野管理机、NVR服务器、站内机器人接入代理模块、若干个汇控柜。还公开一种三维在线智能巡视方法,通过在三维场景中建立1:1可视化巡检环境;在实景三维场景中任意指定兴趣点,三维在线智能巡视系统自动计算出能观测到该目标点位的所有摄像机,并自动对准该目标点位,实现巡视点位与摄像机的自动关联匹配。本发明能够实现对巡视点位的自动聚焦,提升变电巡检自动化、可视化的功能,有效地解决了临时查看或者特殊巡视的需求。
一种变电站设备异常智能巡视系统和方法.pdf
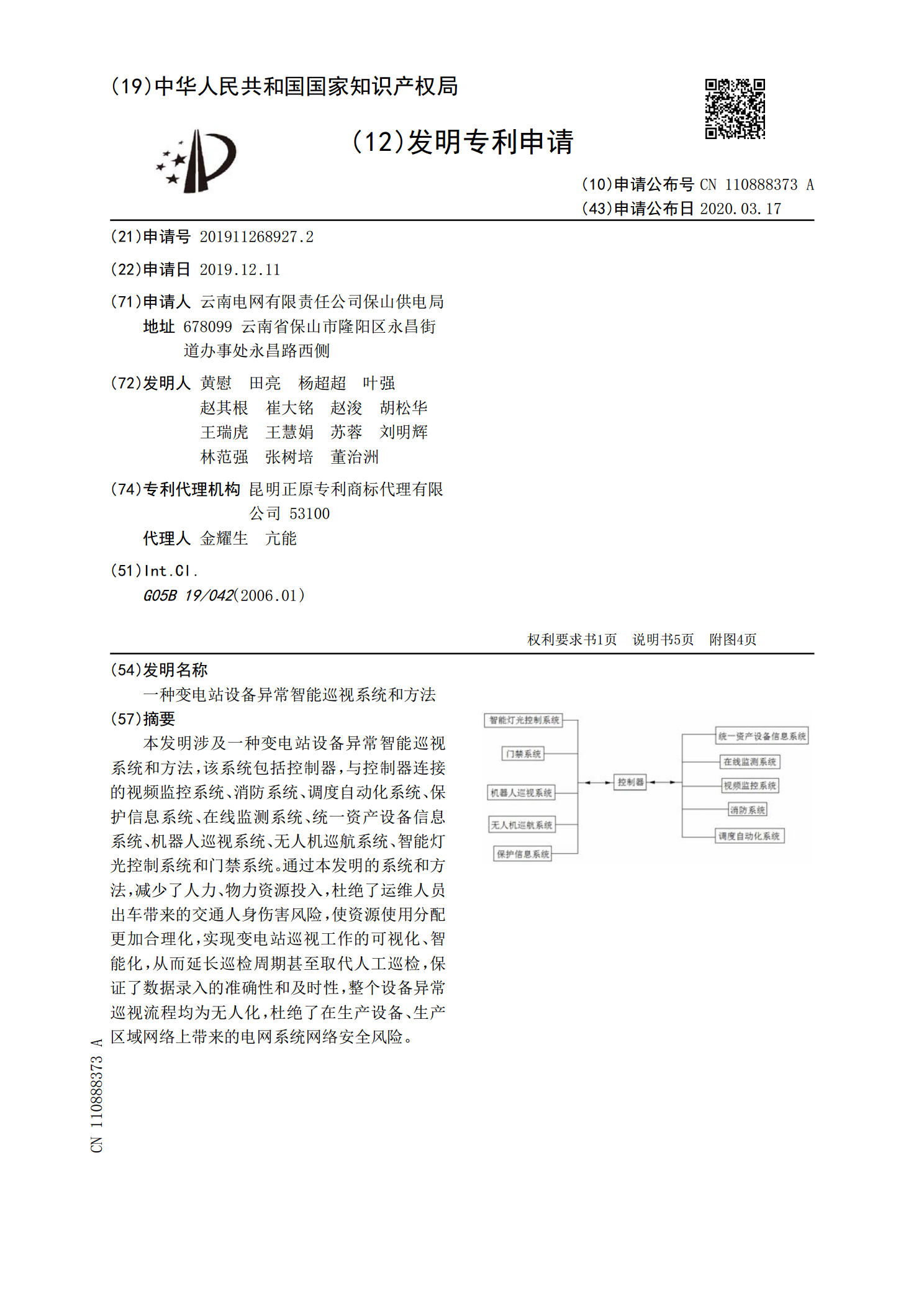
本发明涉及一种变电站设备异常智能巡视系统和方法,该系统包括控制器,与控制器连接的视频监控系统、消防系统、调度自动化系统、保护信息系统、在线监测系统、统一资产设备信息系统、机器人巡视系统、无人机巡航系统、智能灯光控制系统和门禁系统。通过本发明的系统和方法,减少了人力、物力资源投入,杜绝了运维人员出车带来的交通人身伤害风险,使资源使用分配更加合理化,实现变电站巡视工作的可视化、智能化,从而延长巡检周期甚至取代人工巡检,保证了数据录入的准确性和及时性,整个设备异常巡视流程均为无人化,杜绝了在生产设备、生产区域网
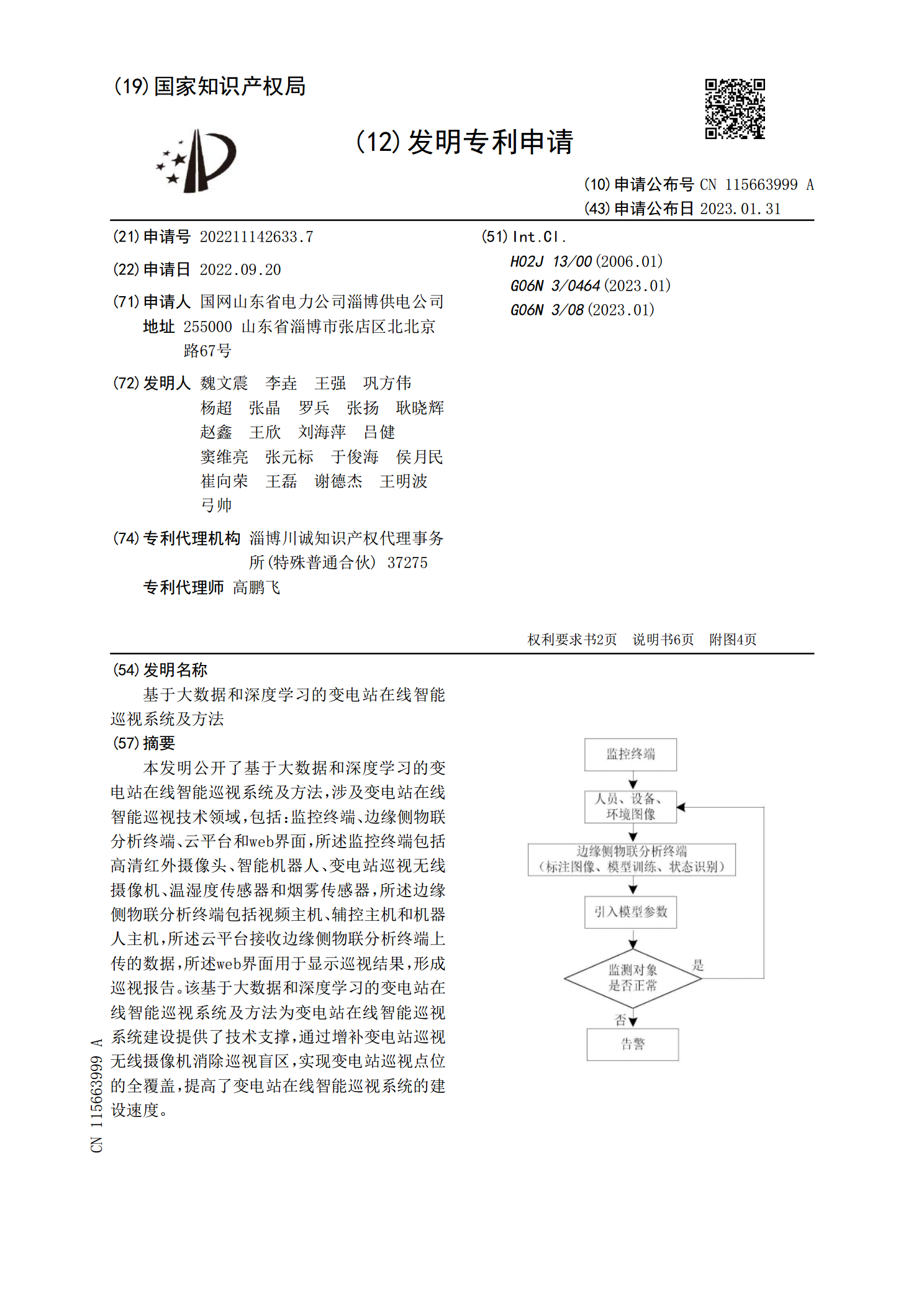
基于大数据和深度学习的变电站在线智能巡视系统及方法.pdf
本发明公开了基于大数据和深度学习的变电站在线智能巡视系统及方法,涉及变电站在线智能巡视技术领域,包括:监控终端、边缘侧物联分析终端、云平台和web界面,所述监控终端包括高清红外摄像头、智能机器人、变电站巡视无线摄像机、温湿度传感器和烟雾传感器,所述边缘侧物联分析终端包括视频主机、辅控主机和机器人主机,所述云平台接收边缘侧物联分析终端上传的数据,所述web界面用于显示巡视结果,形成巡视报告。该基于大数据和深度学习的变电站在线智能巡视系统及方法为变电站在线智能巡视系统建设提供了技术支撑,通过增补变电站巡视无线