
道路负障碍检测方法及系统.pdf

雨巷****轶丽

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
道路负障碍检测方法及系统.pdf
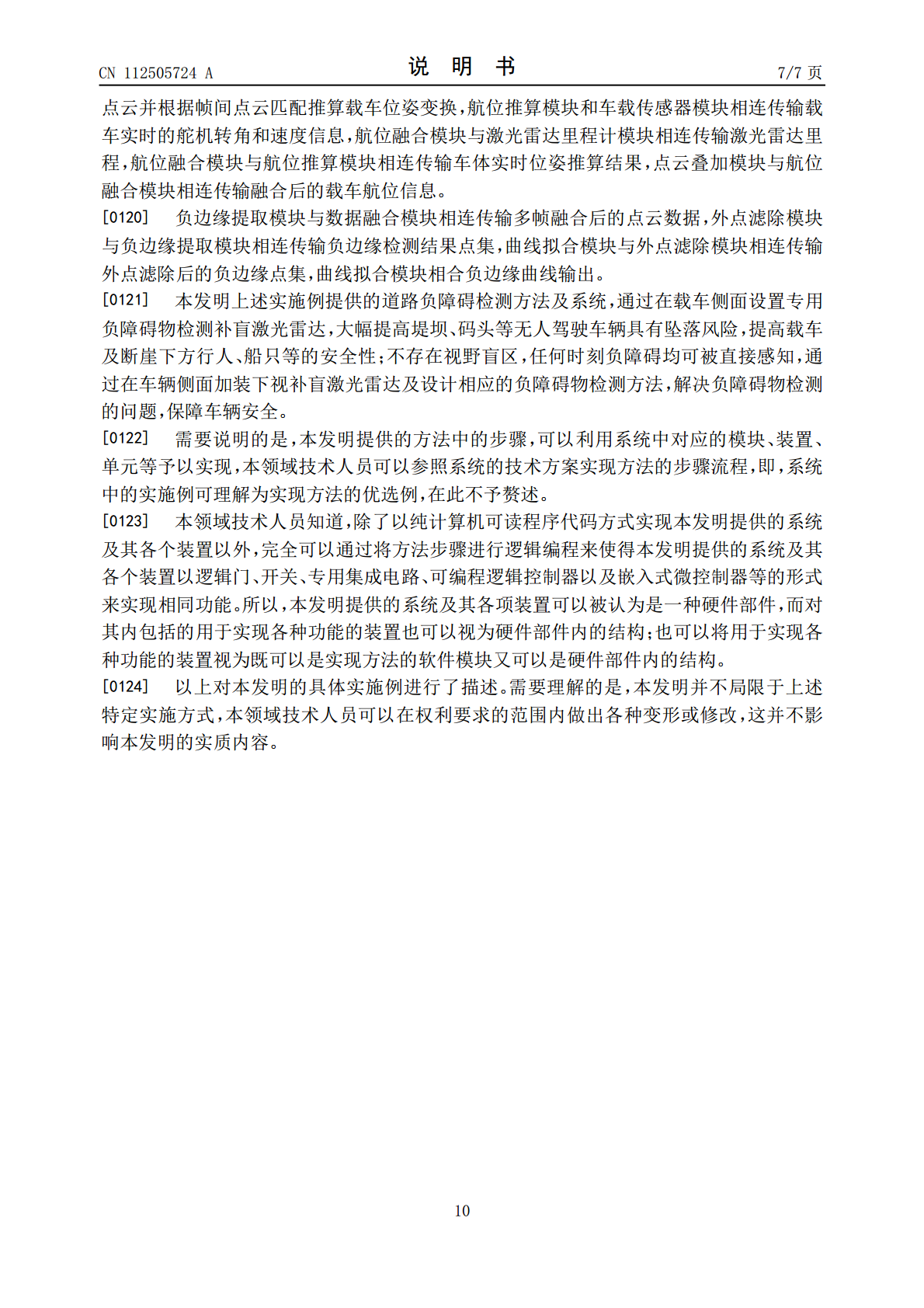
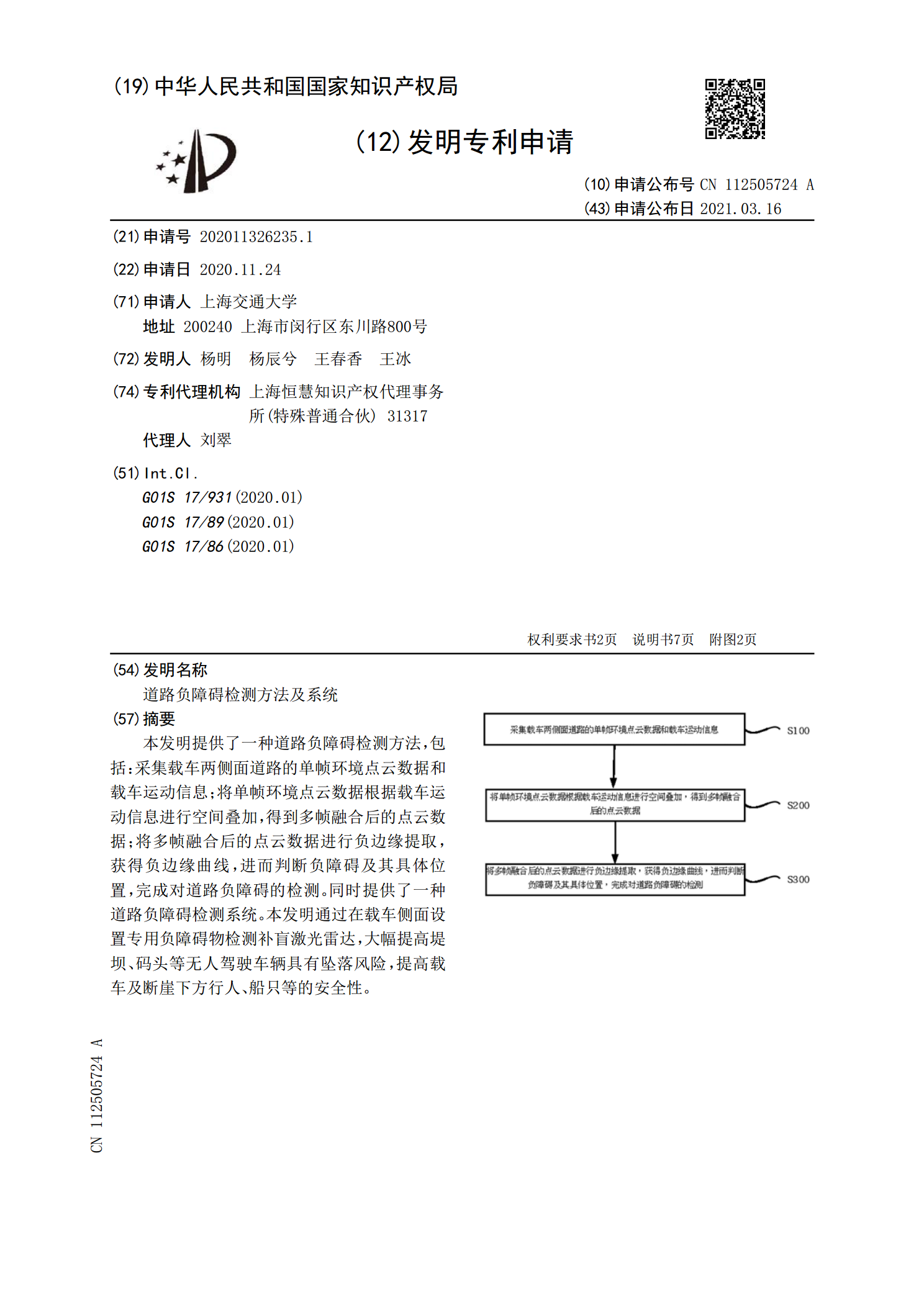
本发明提供了一种道路负障碍检测方法,包括:采集载车两侧面道路的单帧环境点云数据和载车运动信息;将单帧环境点云数据根据载车运动信息进行空间叠加,得到多帧融合后的点云数据;将多帧融合后的点云数据进行负边缘提取,获得负边缘曲线,进而判断负障碍及其具体位置,完成对道路负障碍的检测。同时提供了一种道路负障碍检测系统。本发明通过在载车侧面设置专用负障碍物检测补盲激光雷达,大幅提高堤坝、码头等无人驾驶车辆具有坠落风险,提高载车及断崖下方行人、船只等的安全性。

道路障碍物的检测方法、养护方法、系统、设备及介质.pdf
本发明公开了一种道路障碍物的检测方法、养护方法、系统、设备及介质,所述检测方法包括:获取所述道路的点云数据;从所述点云数据中分离出所述道路的路面点云和待检测点云,并根据所述路面点云确定所述道路的道路边界线;拟合所述道路边界线以得到模拟道路边界线;根据所述模拟道路边界线和道路参数生成所述道路的无障碍管道,并获取所述无障碍管道内的待检测点云以得到道路障碍物的信息。本发明的检测方法,实现了对道路上阻碍视野的障碍物的自动检测,提高了视野障碍物的检测效率和精确度,同时基于道路的差异构建不同高度和形状的无障碍管道,满
构音障碍检测方法和系统.pdf
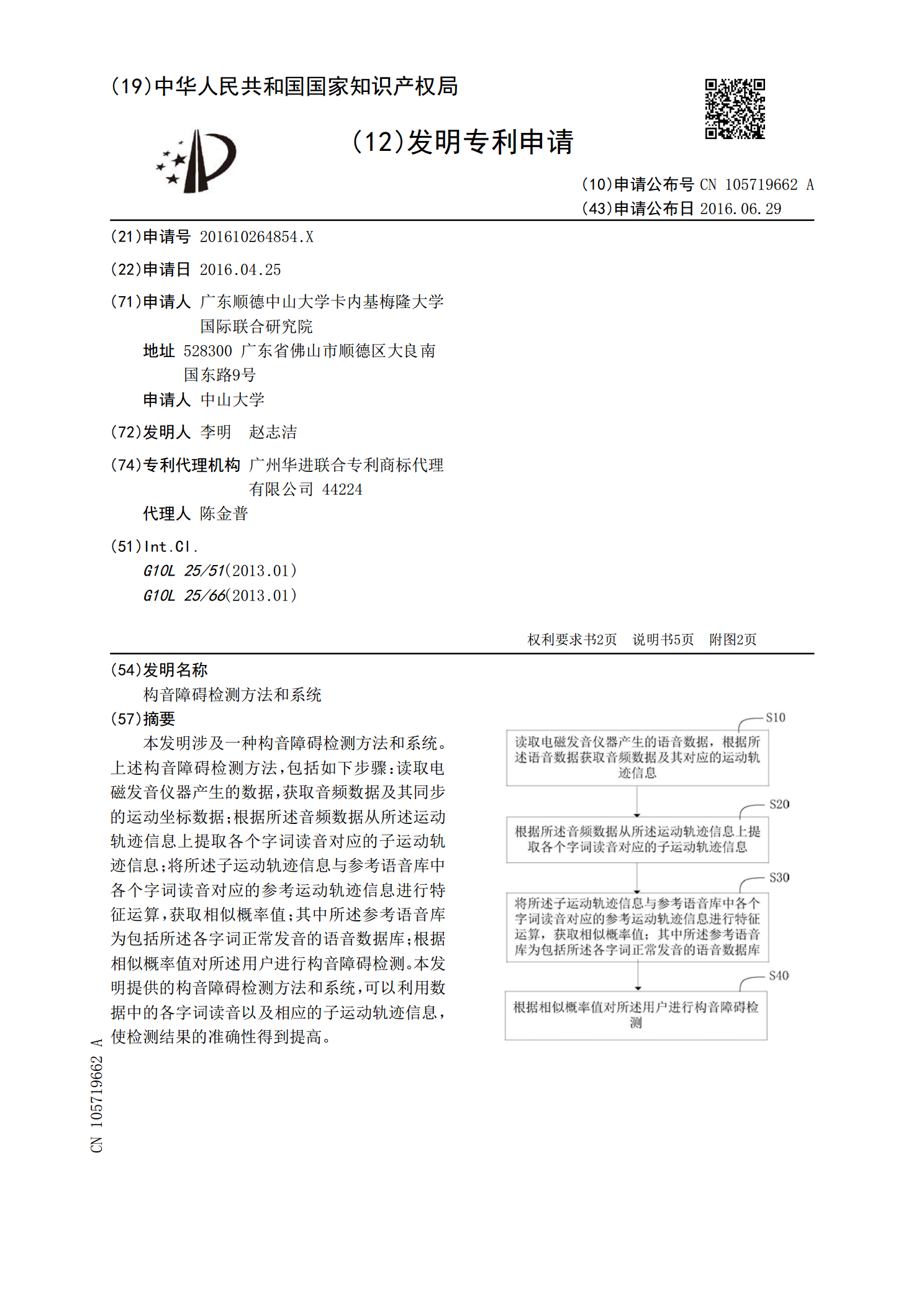
本发明涉及一种构音障碍检测方法和系统。上述构音障碍检测方法,包括如下步骤:读取电磁发音仪器产生的数据,获取音频数据及其同步的运动坐标数据;根据所述音频数据从所述运动轨迹信息上提取各个字词读音对应的子运动轨迹信息;将所述子运动轨迹信息与参考语音库中各个字词读音对应的参考运动轨迹信息进行特征运算,获取相似概率值;其中所述参考语音库为包括所述各字词正常发音的语音数据库;根据相似概率值对所述用户进行构音障碍检测。本发明提供的构音障碍检测方法和系统,可以利用数据中的各字词读音以及相应的子运动轨迹信息,使检测结果的准
道路障碍物检测装置、道路障碍物检测方法及计算机可读记录介质.pdf
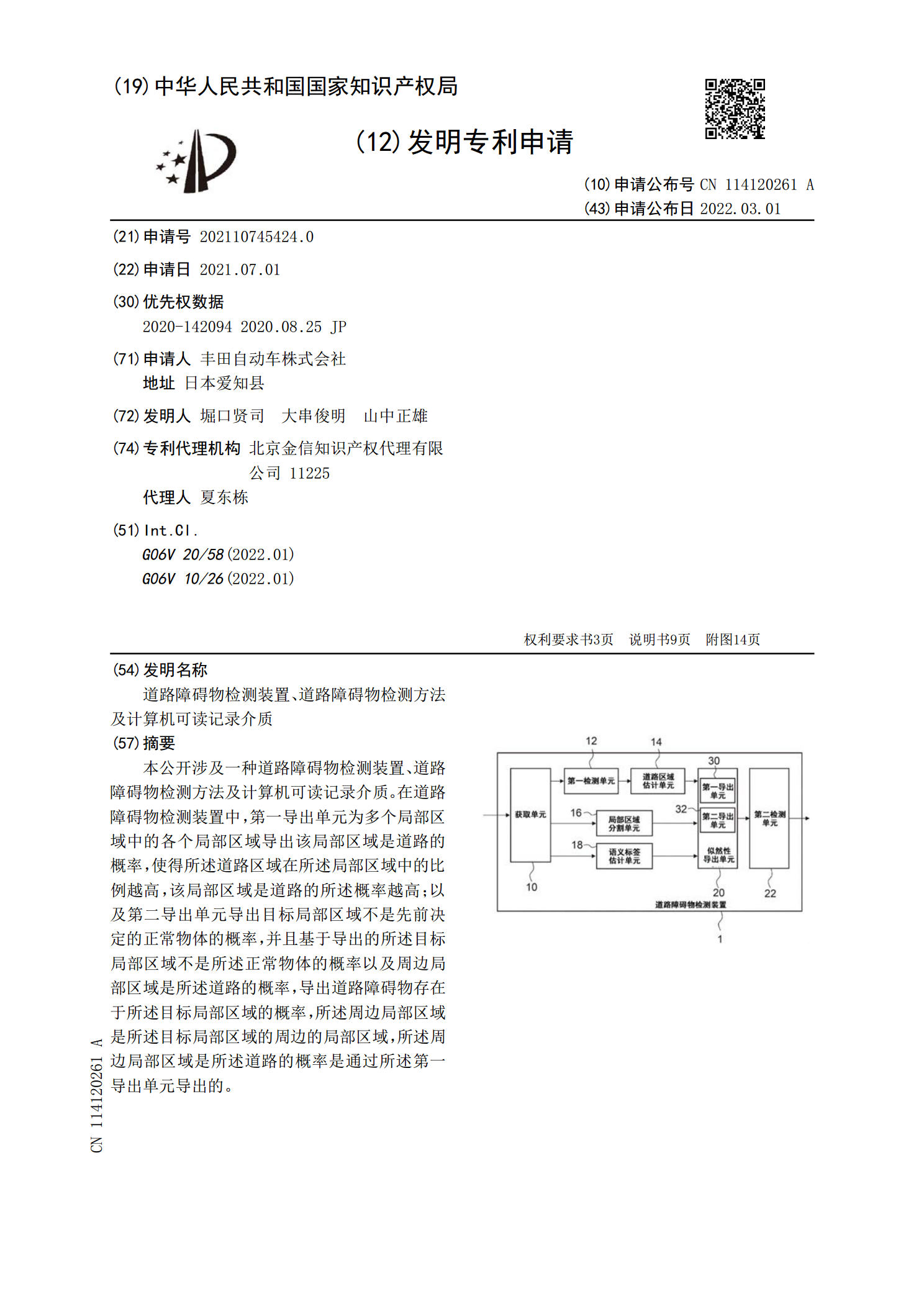
本公开涉及一种道路障碍物检测装置、道路障碍物检测方法及计算机可读记录介质。在道路障碍物检测装置中,第一导出单元为多个局部区域中的各个局部区域导出该局部区域是道路的概率,使得所述道路区域在所述局部区域中的比例越高,该局部区域是道路的所述概率越高;以及第二导出单元导出目标局部区域不是先前决定的正常物体的概率,并且基于导出的所述目标局部区域不是所述正常物体的概率以及周边局部区域是所述道路的概率,导出道路障碍物存在于所述目标局部区域的概率,所述周边局部区域是所述目标局部区域的周边的局部区域,所述周边局部区域是所述
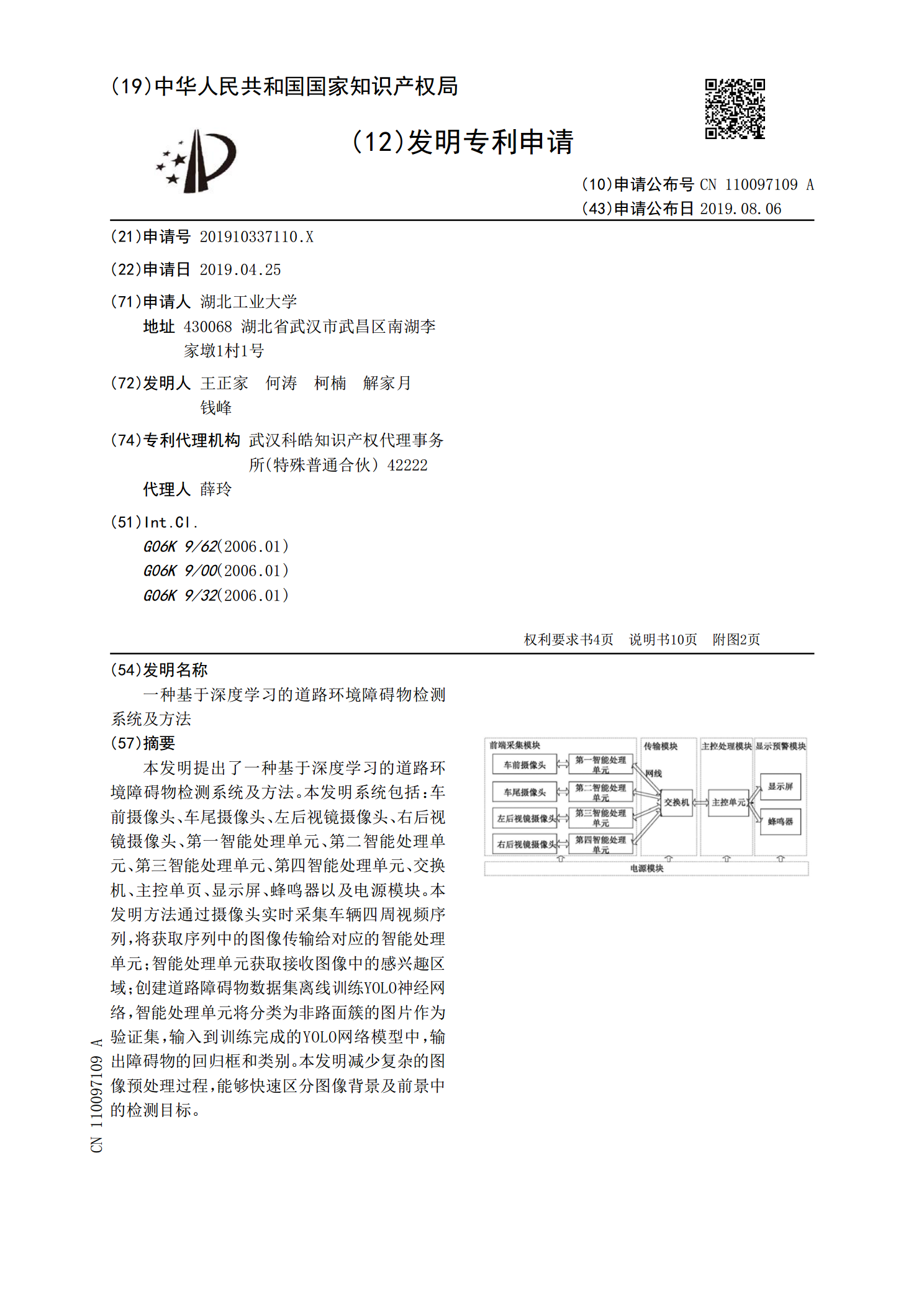
一种基于深度学习的道路环境障碍物检测系统及方法.pdf
本发明提出了一种基于深度学习的道路环境障碍物检测系统及方法。本发明系统包括:车前摄像头、车尾摄像头、左后视镜摄像头、右后视镜摄像头、第一智能处理单元、第二智能处理单元、第三智能处理单元、第四智能处理单元、交换机、主控单页、显示屏、蜂鸣器以及电源模块。本发明方法通过摄像头实时采集车辆四周视频序列,将获取序列中的图像传输给对应的智能处理单元;智能处理单元获取接收图像中的感兴趣区域;创建道路障碍物数据集离线训练YOLO神经网络,智能处理单元将分类为非路面簇的图片作为验证集,输入到训练完成的YOLO网络模型中,输