
一种基于UWB技术C-TWR的井下一维精确定位方法.pdf

邻家****曼玉

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于UWB技术DS-TWR的井下精确定位方位判定方法及系统.pdf
本发明属于UWB技术的矿井精确定位领域,涉及一种基于UWB技术DS‑TWR的井下精确定位方位判定方法及系统,包括,标签与全向定位天线A进行双边双向测距;全向定位天线A将标签相对A天线的距离发送给定位基站;全向定位天线B通过监听标签和全向定位天线B所绑定的全向定位天线A之间的无线数据,计算出标签的方位后将标签的方位发送给定位基站;定位基站依据标签的距离和方位来定位该标签相对该定位基站的位置信息,并将该标签相对该定位基站的位置信息上报给地面服务器;地面服务器依据该定位基站的绝对位置以及该标签相对该定位基站的位
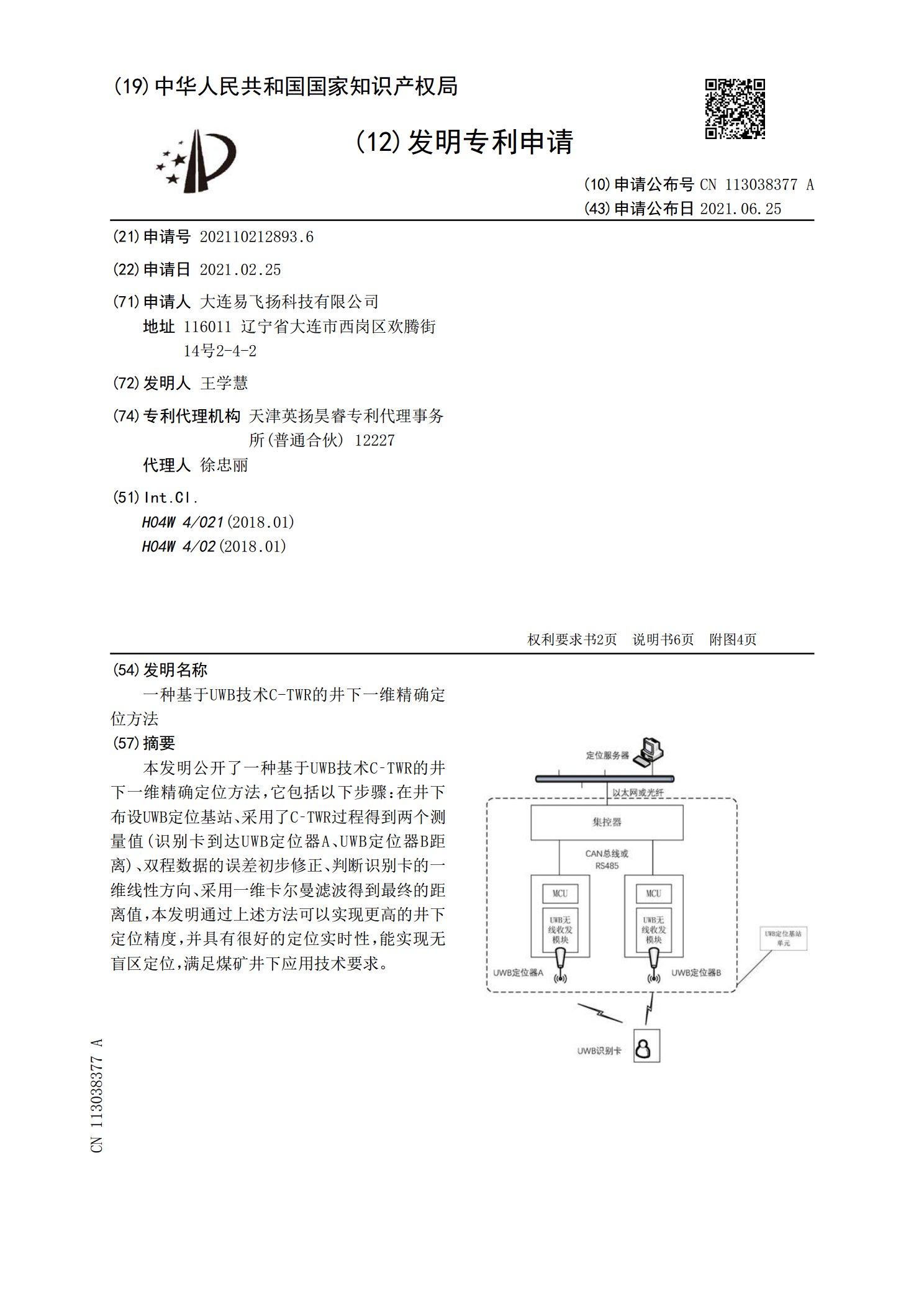
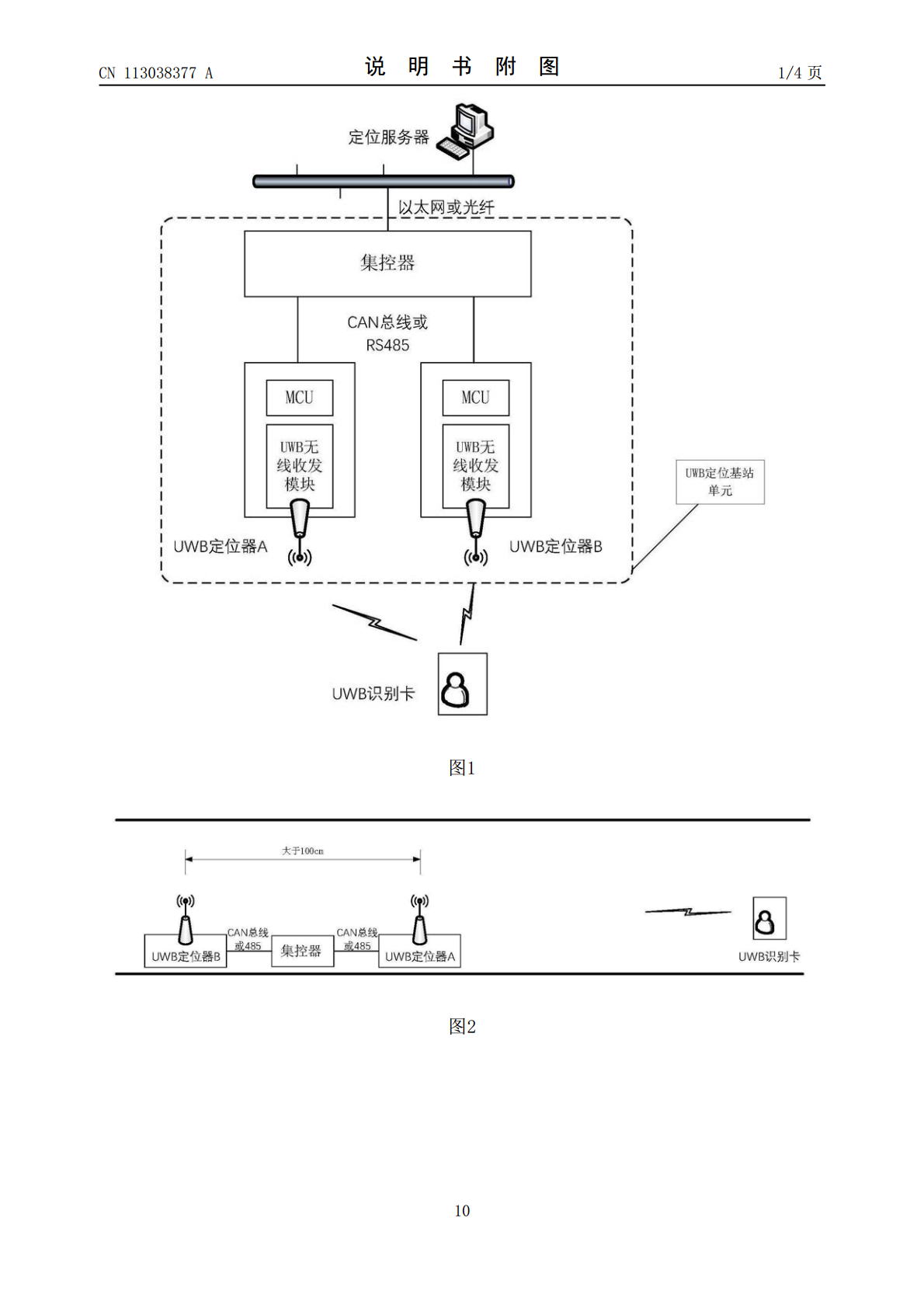
一种基于UWB技术C-TWR的井下一维精确定位方法.pdf
本发明公开了一种基于UWB技术C‑TWR的井下一维精确定位方法,它包括以下步骤:在井下布设UWB定位基站、采用了C‑TWR过程得到两个测量值(识别卡到达UWB定位器A、UWB定位器B距离)、双程数据的误差初步修正、判断识别卡的一维线性方向、采用一维卡尔曼滤波得到最终的距离值,本发明通过上述方法可以实现更高的井下定位精度,并具有很好的定位实时性,能实现无盲区定位,满足煤矿井下应用技术要求。
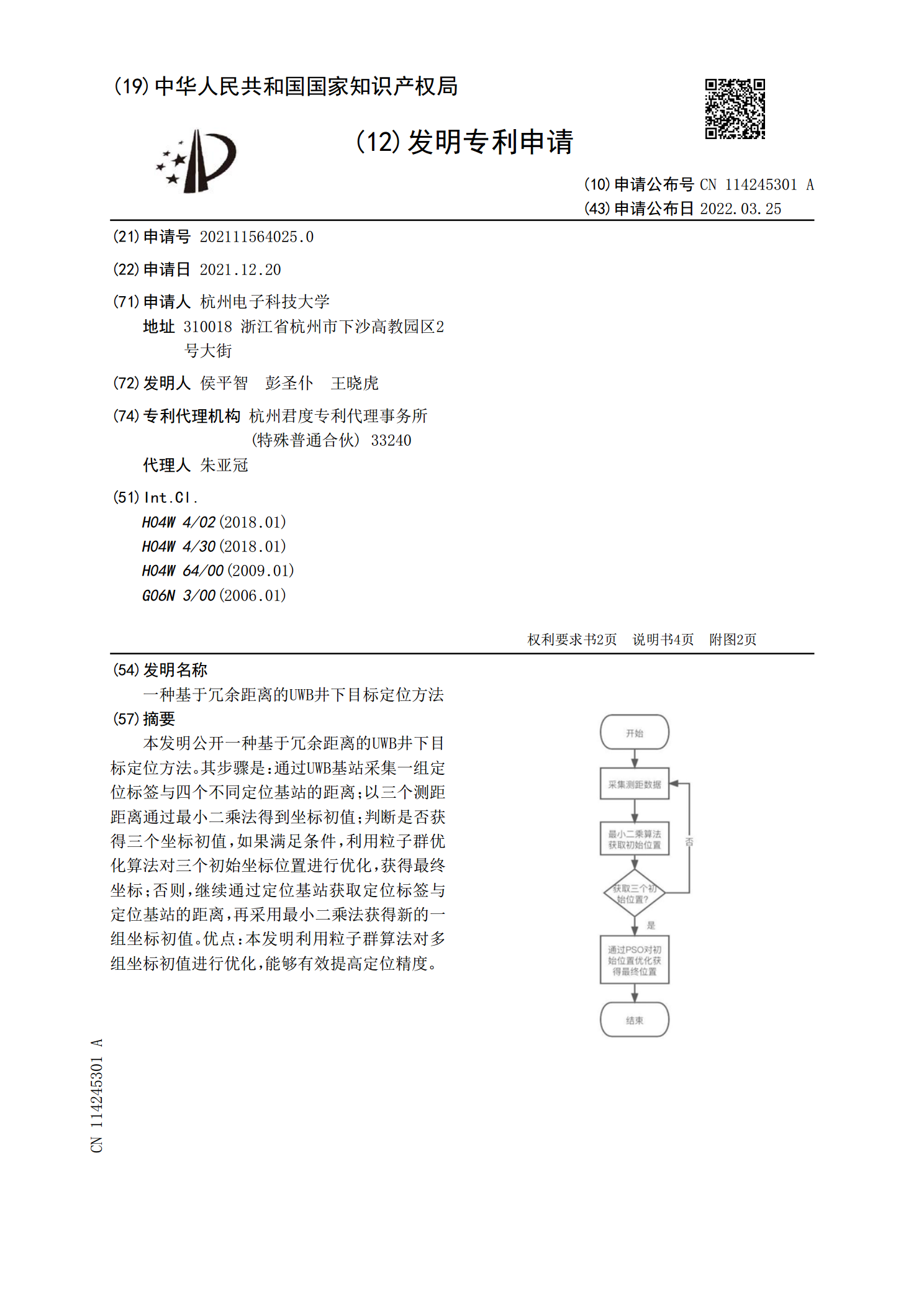
一种基于冗余距离的UWB井下目标定位方法.pdf
本发明公开一种基于冗余距离的UWB井下目标定位方法。其步骤是:通过UWB基站采集一组定位标签与四个不同定位基站的距离;以三个测距距离通过最小二乘法得到坐标初值;判断是否获得三个坐标初值,如果满足条件,利用粒子群优化算法对三个初始坐标位置进行优化,获得最终坐标;否则,继续通过定位基站获取定位标签与定位基站的距离,再采用最小二乘法获得新的一组坐标初值。优点:本发明利用粒子群算法对多组坐标初值进行优化,能够有效提高定位精度。
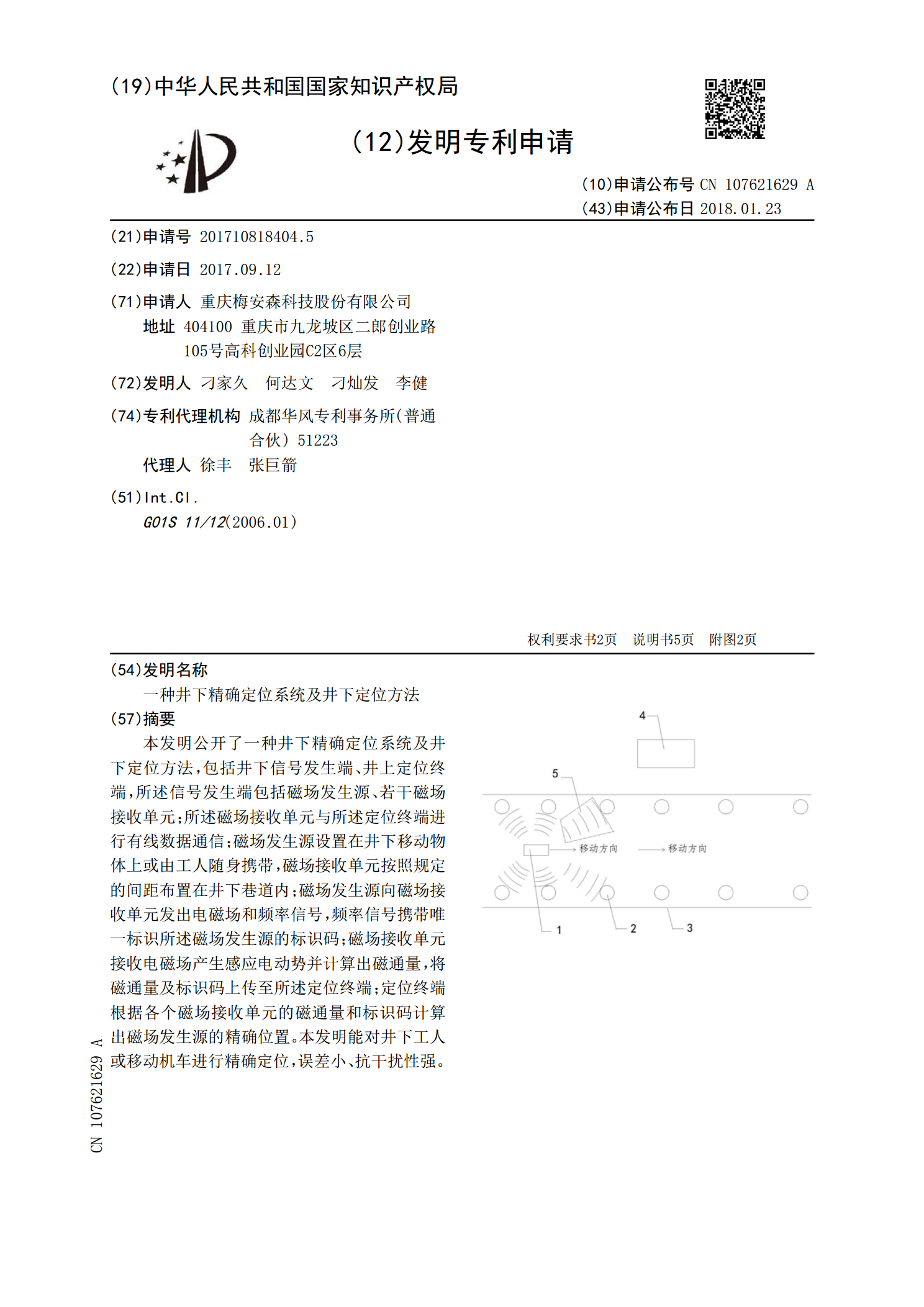
一种井下精确定位系统及井下定位方法.pdf
本发明公开了一种井下精确定位系统及井下定位方法,包括井下信号发生端、井上定位终端,所述信号发生端包括磁场发生源、若干磁场接收单元;所述磁场接收单元与所述定位终端进行有线数据通信;磁场发生源设置在井下移动物体上或由工人随身携带,磁场接收单元按照规定的间距布置在井下巷道内;磁场发生源向磁场接收单元发出电磁场和频率信号,频率信号携带唯一标识所述磁场发生源的标识码;磁场接收单元接收电磁场产生感应电动势并计算出磁通量,将磁通量及标识码上传至所述定位终端;定位终端根据各个磁场接收单元的磁通量和标识码计算出磁场发生源的
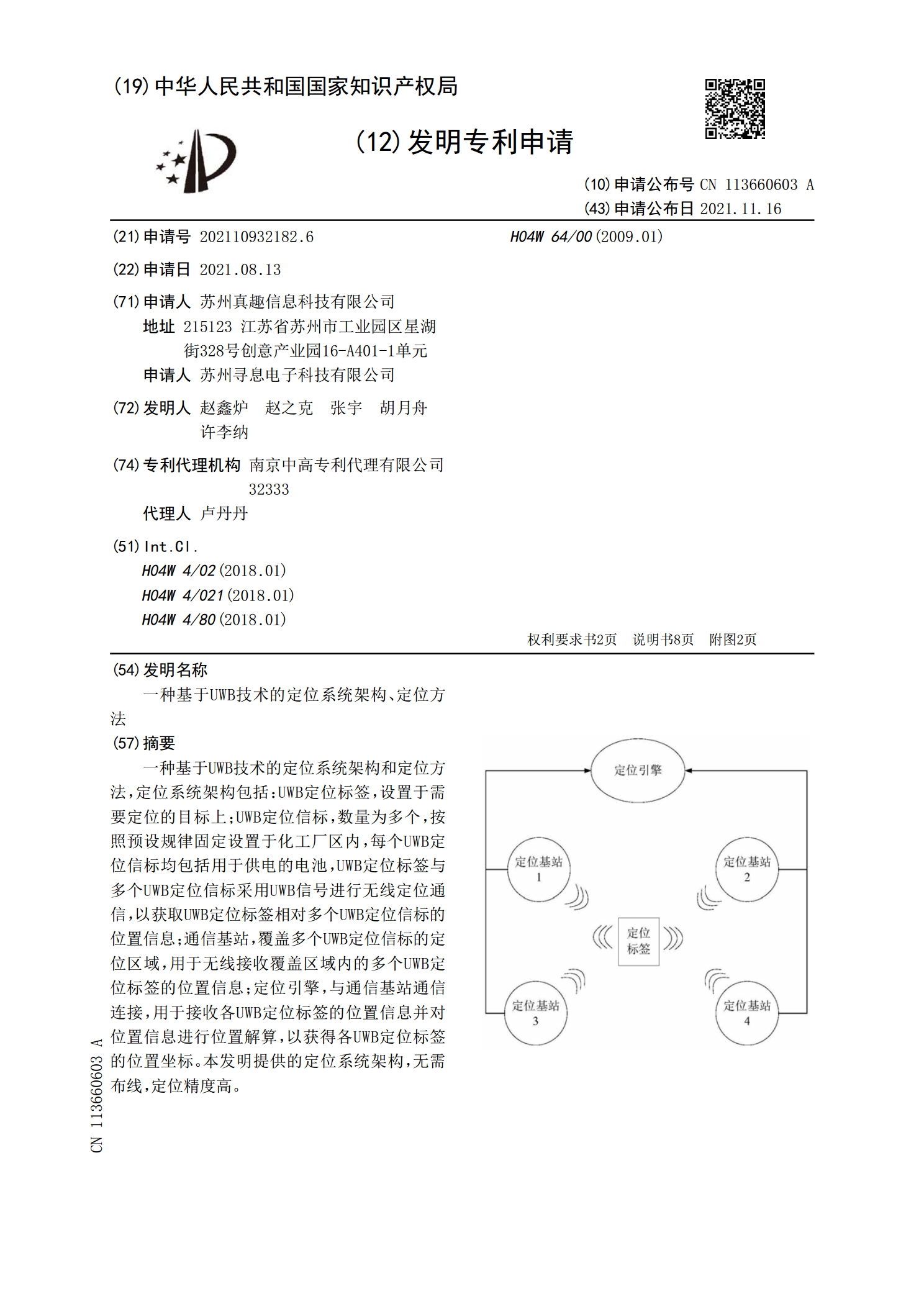
一种基于UWB技术的定位系统架构、定位方法.pdf
一种基于UWB技术的定位系统架构和定位方法,定位系统架构包括:UWB定位标签,设置于需要定位的目标上;UWB定位信标,数量为多个,按照预设规律固定设置于化工厂区内,每个UWB定位信标均包括用于供电的电池,UWB定位标签与多个UWB定位信标采用UWB信号进行无线定位通信,以获取UWB定位标签相对多个UWB定位信标的位置信息;通信基站,覆盖多个UWB定位信标的定位区域,用于无线接收覆盖区域内的多个UWB定位标签的位置信息;定位引擎,与通信基站通信连接,用于接收各UWB定位标签的位置信息并对位置信息进行位置解算