
增强旋转机械故障信号特征的盲解卷积算法.pdf

一只****ng

1/9
2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
增强旋转机械故障信号特征的盲解卷积算法.pdf
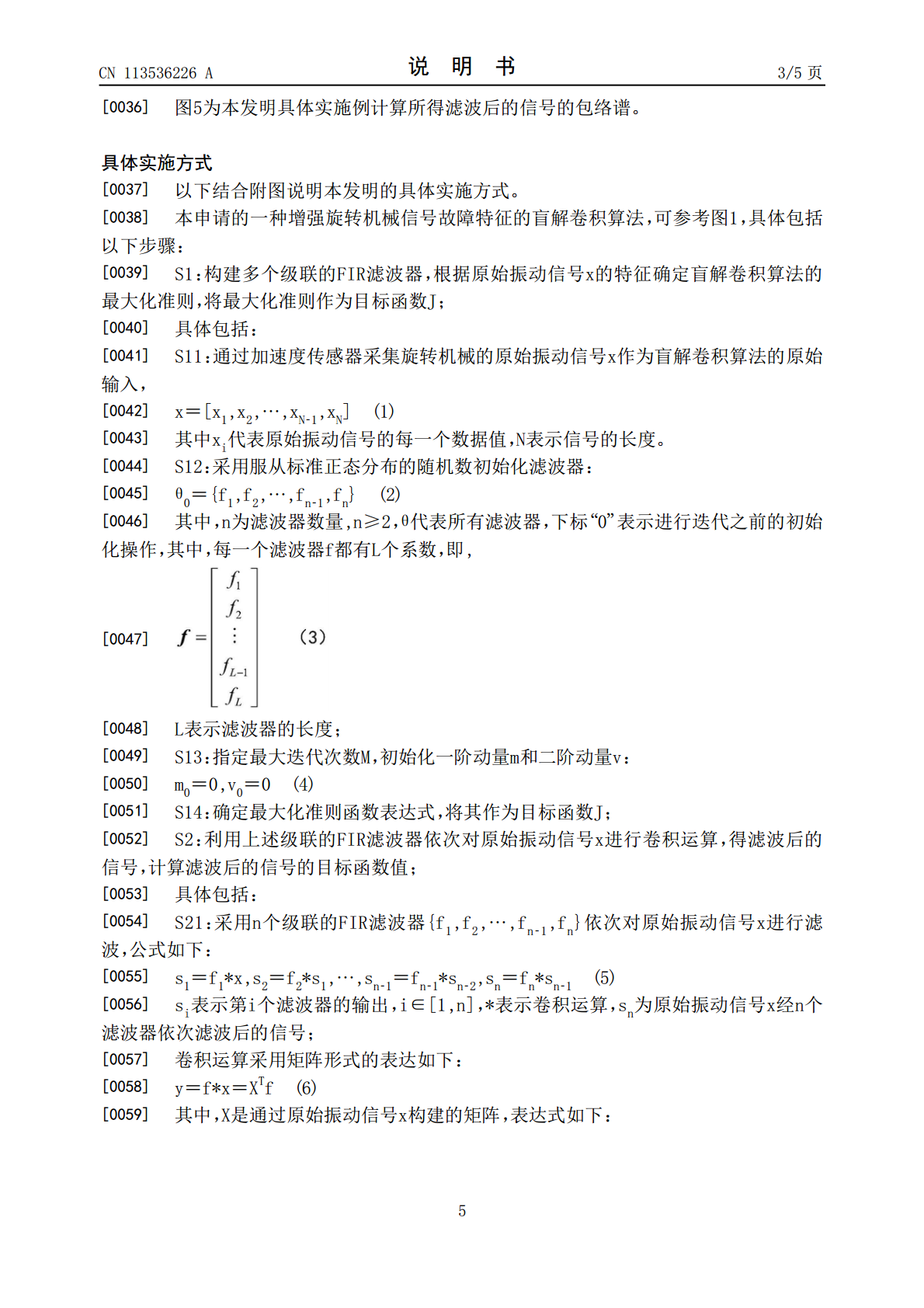
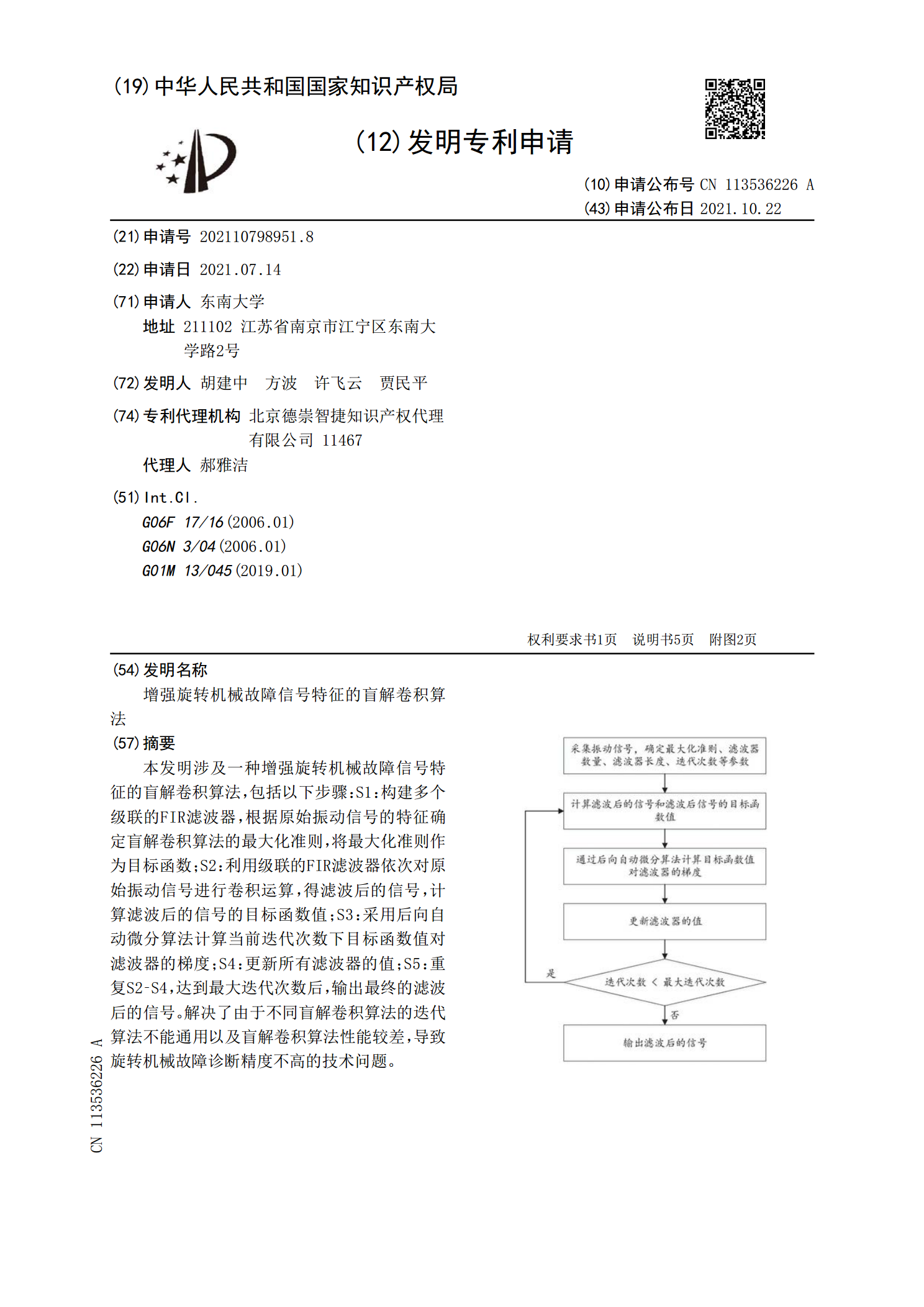
本发明涉及一种增强旋转机械故障信号特征的盲解卷积算法,包括以下步骤:S1:构建多个级联的FIR滤波器,根据原始振动信号的特征确定盲解卷积算法的最大化准则,将最大化准则作为目标函数;S2:利用级联的FIR滤波器依次对原始振动信号进行卷积运算,得滤波后的信号,计算滤波后的信号的目标函数值;S3:采用后向自动微分算法计算当前迭代次数下目标函数值对滤波器的梯度;S4:更新所有滤波器的值;S5:重复S2‑S4,达到最大迭代次数后,输出最终的滤波后的信号。解决了由于不同盲解卷积算法的迭代算法不能通用以及盲解卷积算法性
卷积语音信号的频域盲分离排序算法.pdf
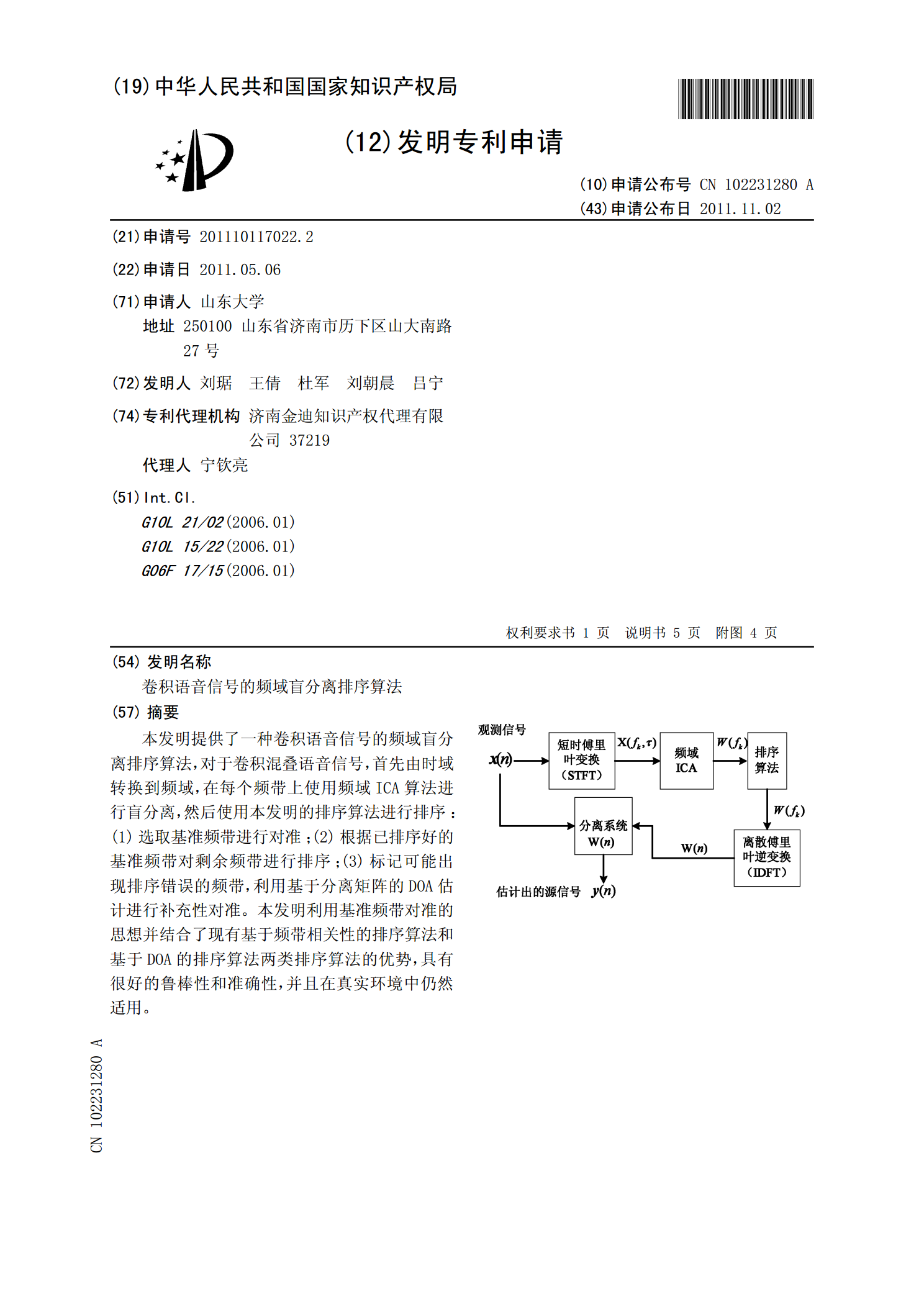
本发明提供了一种卷积语音信号的频域盲分离排序算法,对于卷积混叠语音信号,首先由时域转换到频域,在每个频带上使用频域ICA算法进行盲分离,然后使用本发明的排序算法进行排序:(1)选取基准频带进行对准;(2)根据已排序好的基准频带对剩余频带进行排序;(3)标记可能出现排序错误的频带,利用基于分离矩阵的DOA估计进行补充性对准。本发明利用基准频带对准的思想并结合了现有基于频带相关性的排序算法和基于DOA的排序算法两类排序算法的优势,具有很好的鲁棒性和准确性,并且在真实环境中仍然适用。
提取声学信号识别与盲解卷积算法的齿轮箱故障的方法.pdf
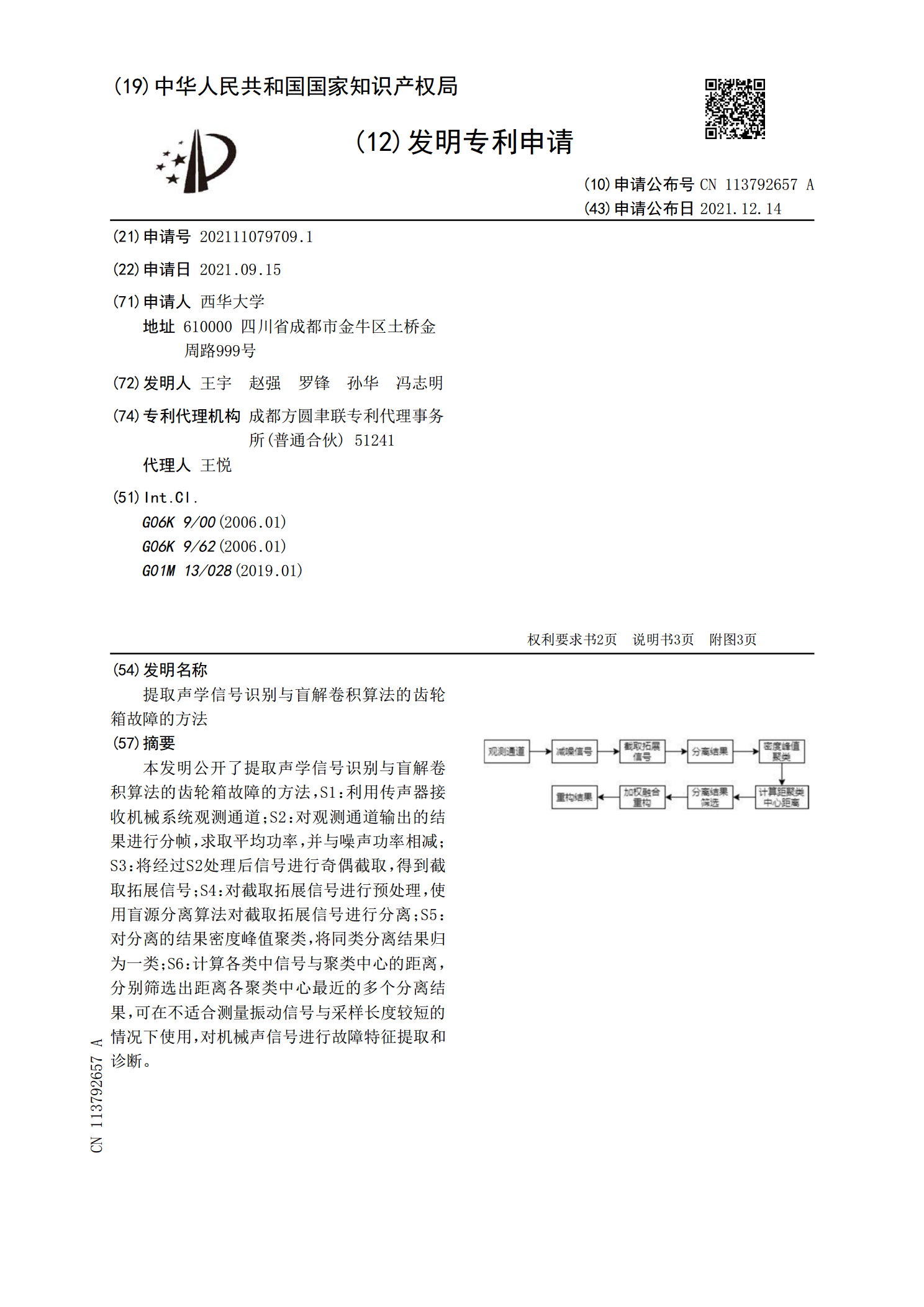
本发明公开了提取声学信号识别与盲解卷积算法的齿轮箱故障的方法,S1:利用传声器接收机械系统观测通道;S2:对观测通道输出的结果进行分帧,求取平均功率,并与噪声功率相减;S3:将经过S2处理后信号进行奇偶截取,得到截取拓展信号;S4:对截取拓展信号进行预处理,使用盲源分离算法对截取拓展信号进行分离;S5:对分离的结果密度峰值聚类,将同类分离结果归为一类;S6:计算各类中信号与聚类中心的距离,分别筛选出距离各聚类中心最近的多个分离结果,可在不适合测量振动信号与采样长度较短的情况下使用,对机械声信号进行故障特征
一种语音信号频域盲解卷积方法.pdf
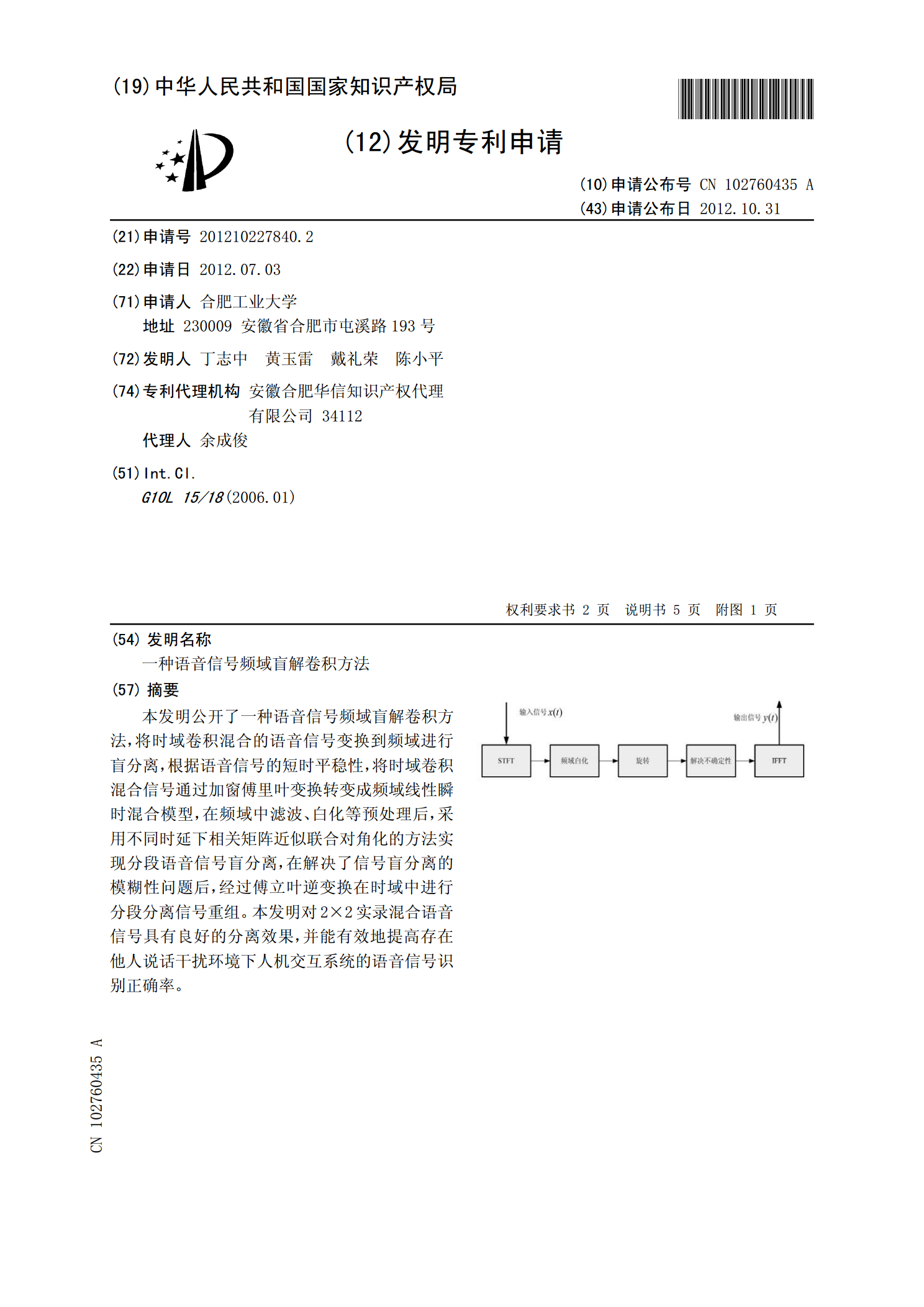
本发明公开了一种语音信号频域盲解卷积方法,将时域卷积混合的语音信号变换到频域进行盲分离,根据语音信号的短时平稳性,将时域卷积混合信号通过加窗傅里叶变换转变成频域线性瞬时混合模型,在频域中滤波、白化等预处理后,采用不同时延下相关矩阵近似联合对角化的方法实现分段语音信号盲分离,在解决了信号盲分离的模糊性问题后,经过傅立叶逆变换在时域中进行分段分离信号重组。本发明对2×2实录混合语音信号具有良好的分离效果,并能有效地提高存在他人说话干扰环境下人机交互系统的语音信号识别正确率。
基于ILSP算法的信号盲解扩方法.pdf
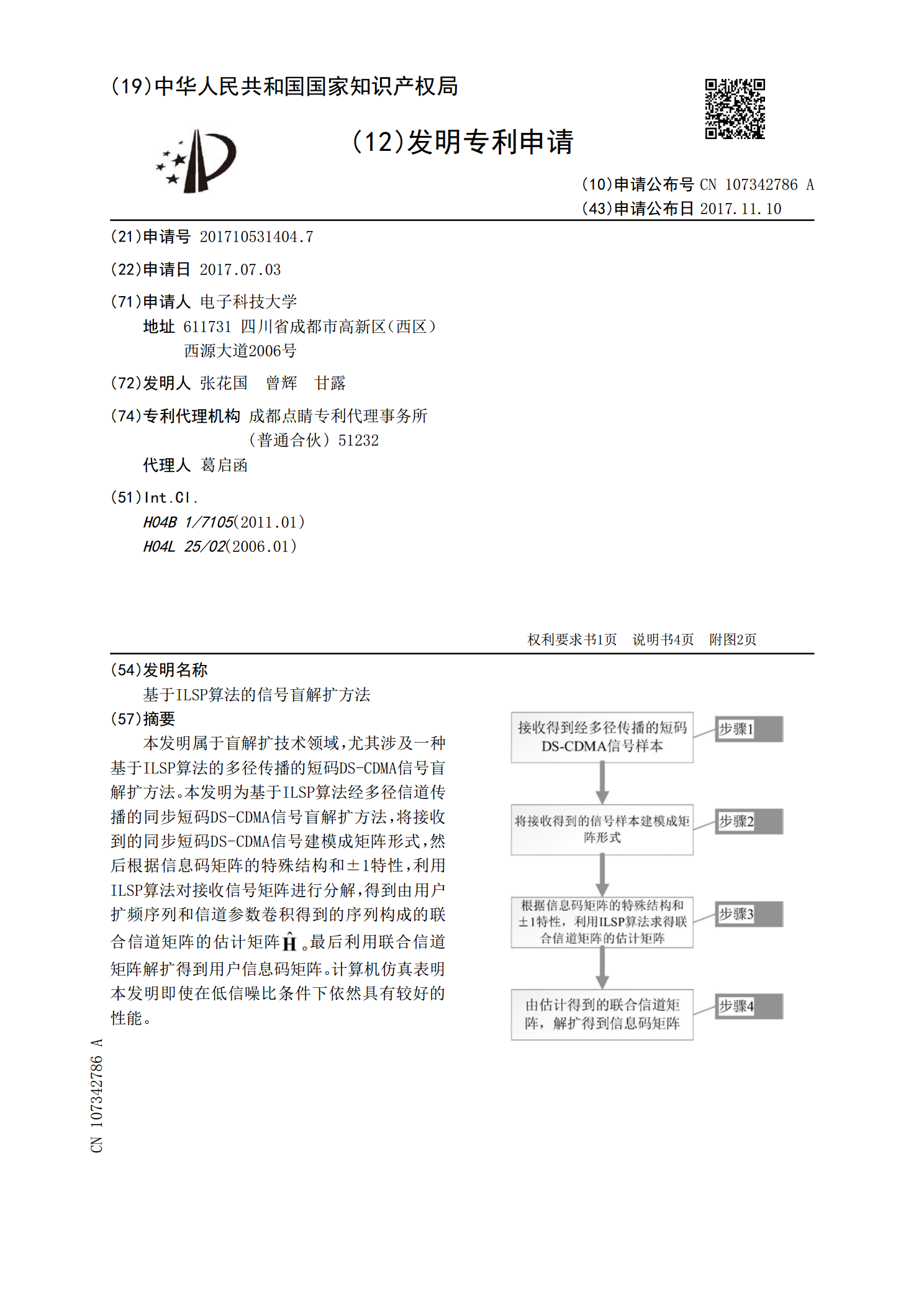
本发明属于盲解扩技术领域,尤其涉及一种基于ILSP算法的多径传播的短码DS‑CDMA信号盲解扩方法。本发明为基于ILSP算法经多径信道传播的同步短码DS‑CDMA信号盲解扩方法,将接收到的同步短码DS‑CDMA信号建模成矩阵形式,然后根据信息码矩阵的特殊结构和±1特性,利用ILSP算法对接收信号矩阵进行分解,得到由用户扩频序列和信道参数卷积得到的序列构成的联合信道矩阵的估计矩阵