
基于快速非线性盲解卷积的旋转机械早期故障诊断方法.pdf

春岚****23

1/8
2/8

3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于快速非线性盲解卷积的旋转机械早期故障诊断方法.pdf
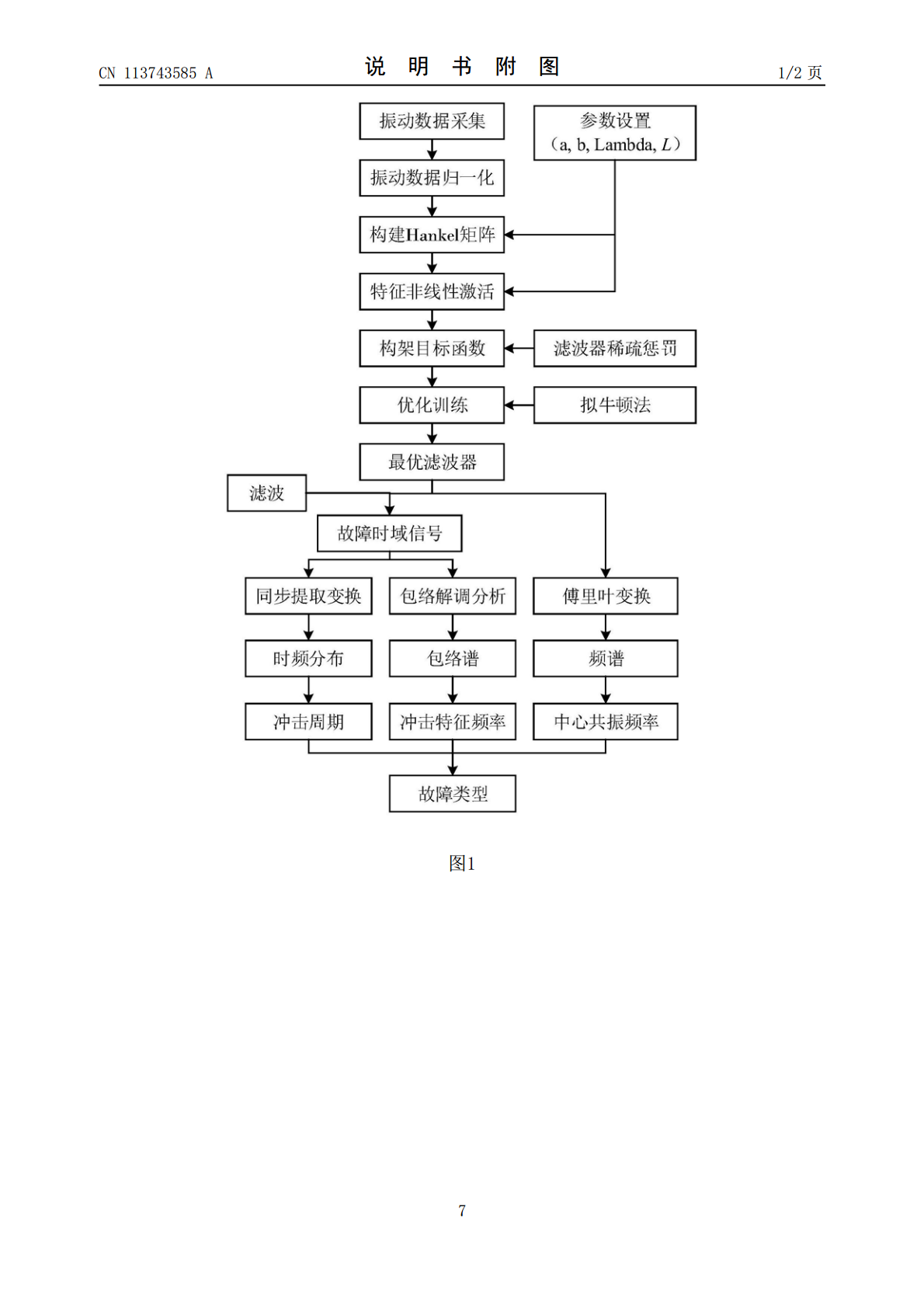
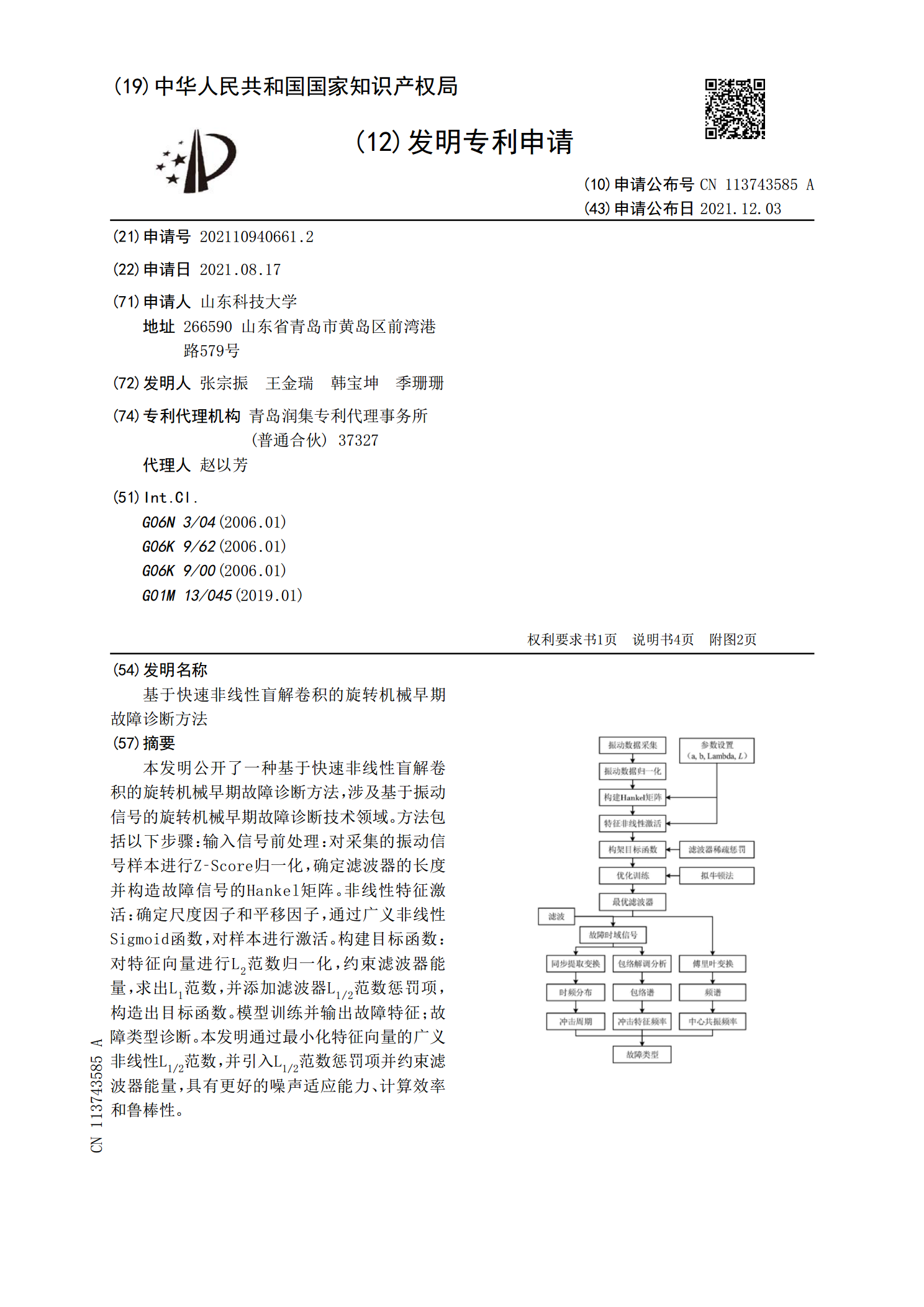
本发明公开了一种基于快速非线性盲解卷积的旋转机械早期故障诊断方法,涉及基于振动信号的旋转机械早期故障诊断技术领域。方法包括以下步骤:输入信号前处理:对采集的振动信号样本进行Z‑Score归一化,确定滤波器的长度并构造故障信号的Hankel矩阵。非线性特征激活:确定尺度因子和平移因子,通过广义非线性Sigmoid函数,对样本进行激活。构建目标函数:对特征向量进行L
基于最大重加权峭度盲解卷积的机械故障诊断方法.pdf
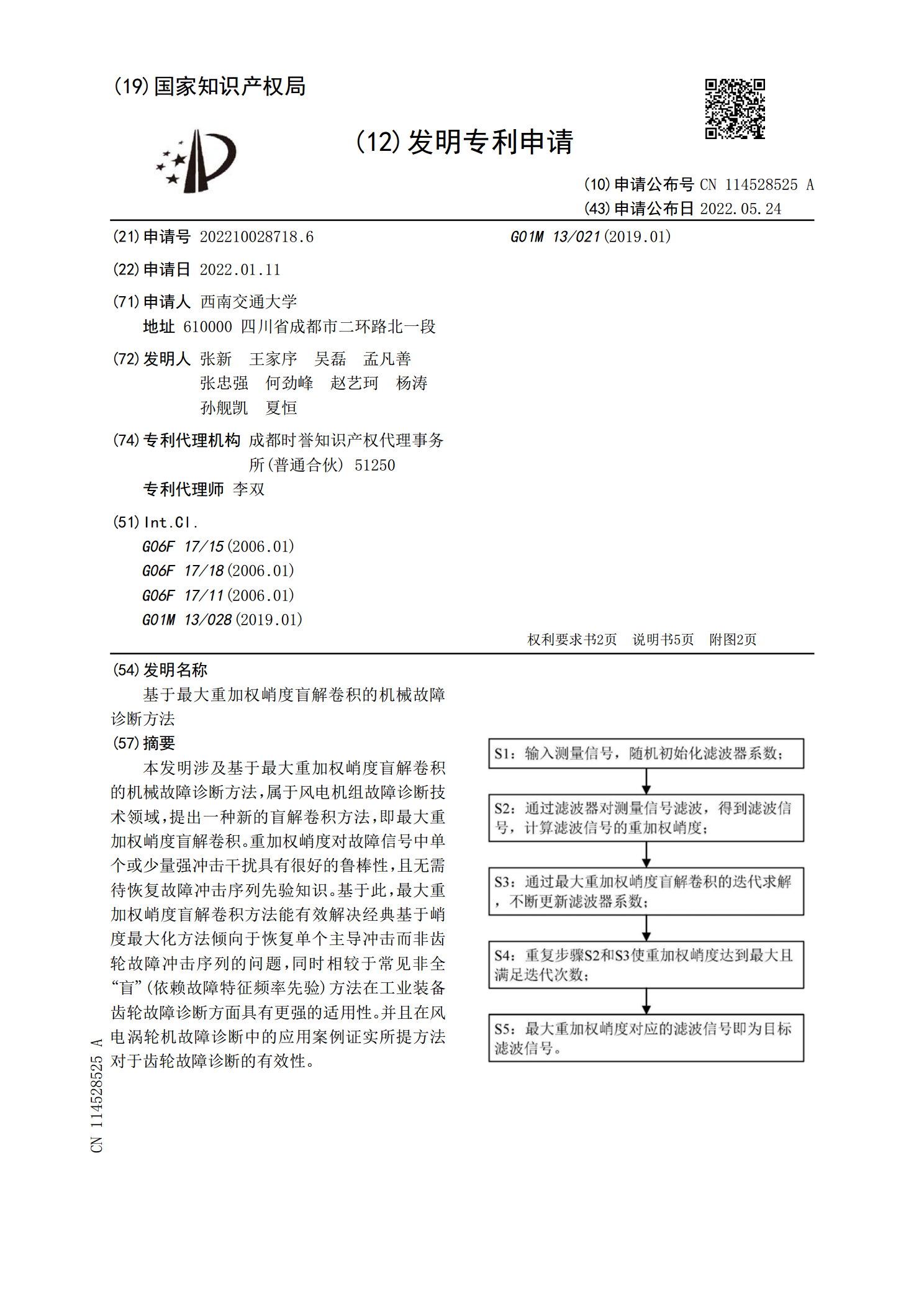
本发明涉及基于最大重加权峭度盲解卷积的机械故障诊断方法,属于风电机组故障诊断技术领域,提出一种新的盲解卷积方法,即最大重加权峭度盲解卷积。重加权峭度对故障信号中单个或少量强冲击干扰具有很好的鲁棒性,且无需待恢复故障冲击序列先验知识。基于此,最大重加权峭度盲解卷积方法能有效解决经典基于峭度最大化方法倾向于恢复单个主导冲击而非齿轮故障冲击序列的问题,同时相较于常见非全“盲”(依赖故障特征频率先验)方法在工业装备齿轮故障诊断方面具有更强的适用性。并且在风电涡轮机故障诊断中的应用案例证实所提方法对于齿轮故障诊断的
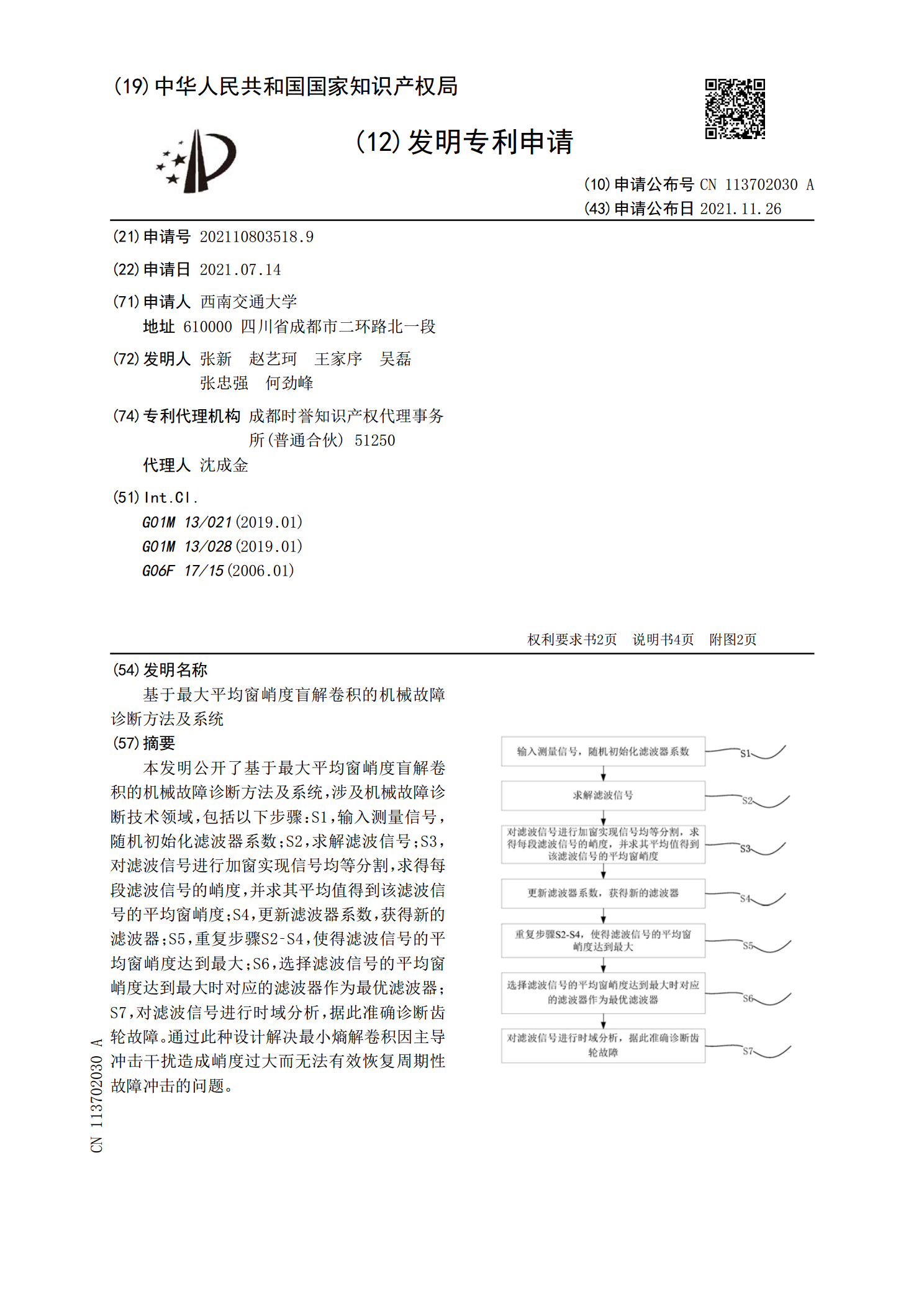
基于最大平均窗峭度盲解卷积的机械故障诊断方法及系统.pdf
本发明公开了基于最大平均窗峭度盲解卷积的机械故障诊断方法及系统,涉及机械故障诊断技术领域,包括以下步骤:S1,输入测量信号,随机初始化滤波器系数;S2,求解滤波信号;S3,对滤波信号进行加窗实现信号均等分割,求得每段滤波信号的峭度,并求其平均值得到该滤波信号的平均窗峭度;S4,更新滤波器系数,获得新的滤波器;S5,重复步骤S2‑S4,使得滤波信号的平均窗峭度达到最大;S6,选择滤波信号的平均窗峭度达到最大时对应的滤波器作为最优滤波器;S7,对滤波信号进行时域分析,据此准确诊断齿轮故障。通过此种设计解决最小
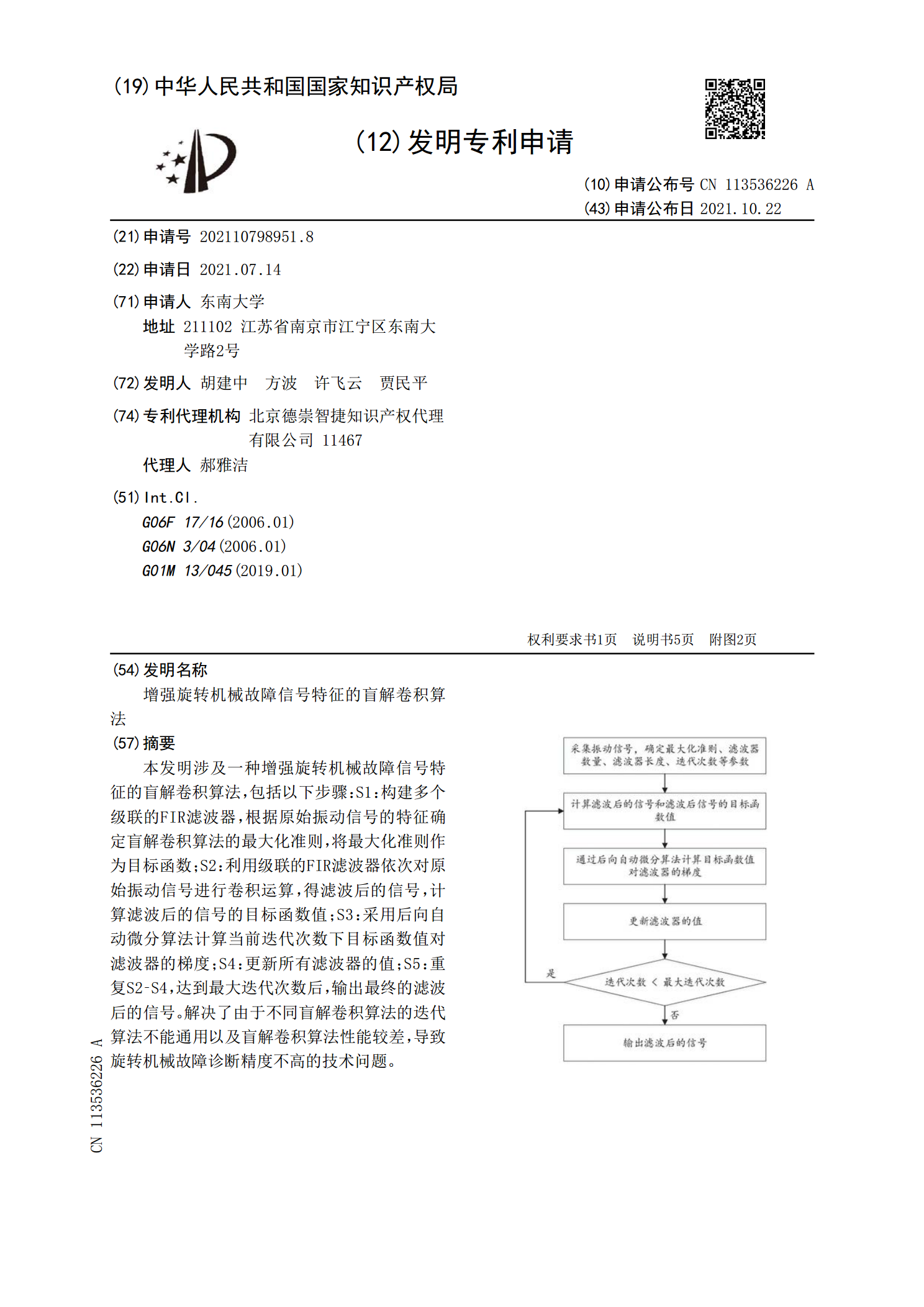
增强旋转机械故障信号特征的盲解卷积算法.pdf
本发明涉及一种增强旋转机械故障信号特征的盲解卷积算法,包括以下步骤:S1:构建多个级联的FIR滤波器,根据原始振动信号的特征确定盲解卷积算法的最大化准则,将最大化准则作为目标函数;S2:利用级联的FIR滤波器依次对原始振动信号进行卷积运算,得滤波后的信号,计算滤波后的信号的目标函数值;S3:采用后向自动微分算法计算当前迭代次数下目标函数值对滤波器的梯度;S4:更新所有滤波器的值;S5:重复S2‑S4,达到最大迭代次数后,输出最终的滤波后的信号。解决了由于不同盲解卷积算法的迭代算法不能通用以及盲解卷积算法性
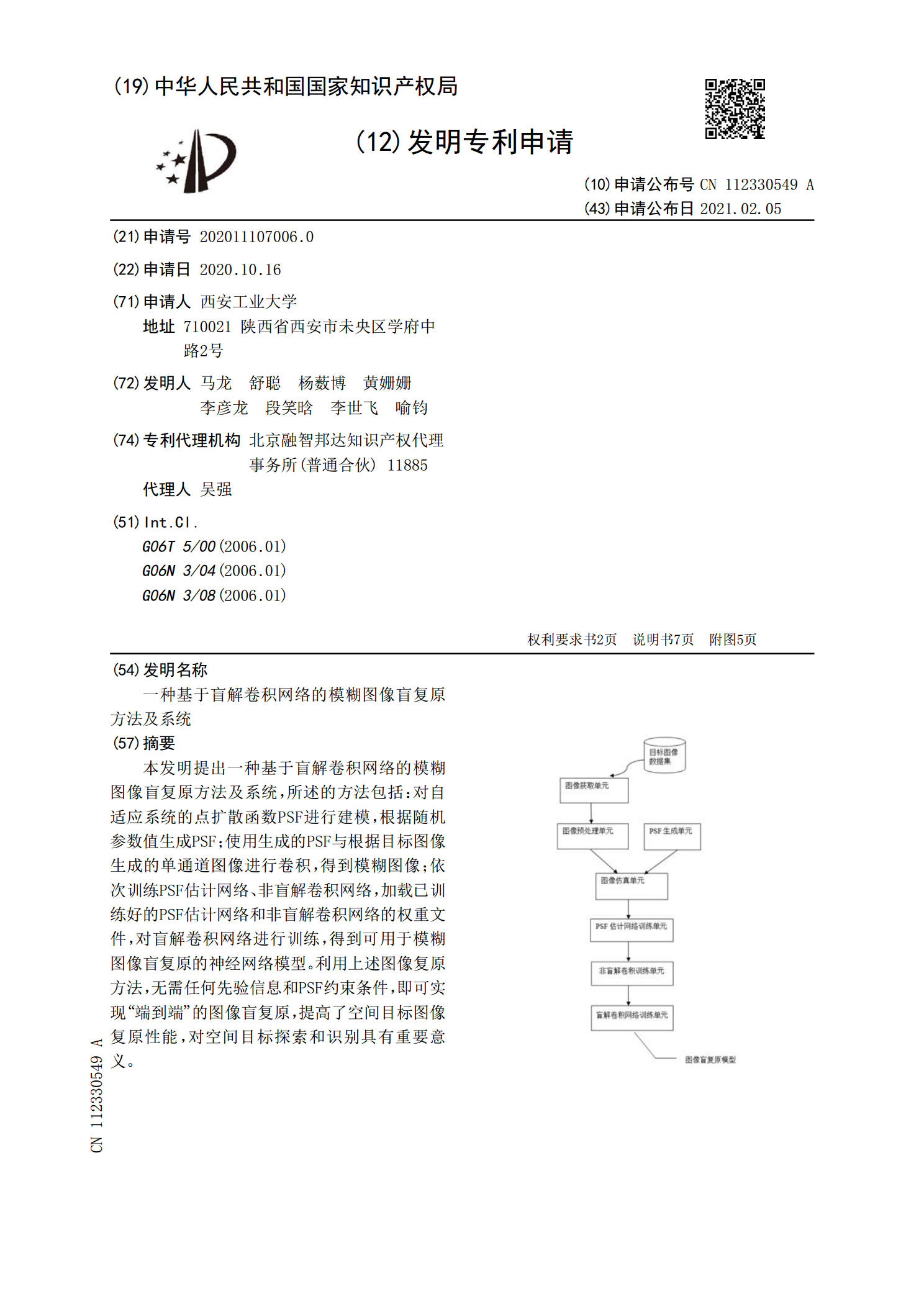
一种基于盲解卷积网络的模糊图像盲复原方法及系统.pdf
本发明提出一种基于盲解卷积网络的模糊图像盲复原方法及系统,所述的方法包括:对自适应系统的点扩散函数PSF进行建模,根据随机参数值生成PSF;使用生成的PSF与根据目标图像生成的单通道图像进行卷积,得到模糊图像;依次训练PSF估计网络、非盲解卷积网络,加载已训练好的PSF估计网络和非盲解卷积网络的权重文件,对盲解卷积网络进行训练,得到可用于模糊图像盲复原的神经网络模型。利用上述图像复原方法,无需任何先验信息和PSF约束条件,即可实现“端到端”的图像盲复原,提高了空间目标图像复原性能,对空间目标探索和识别具有