
探测信号发射系统、激光雷达系统及探测方法.pdf

小琛****82

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
探测信号发射系统、激光雷达系统及探测方法.pdf
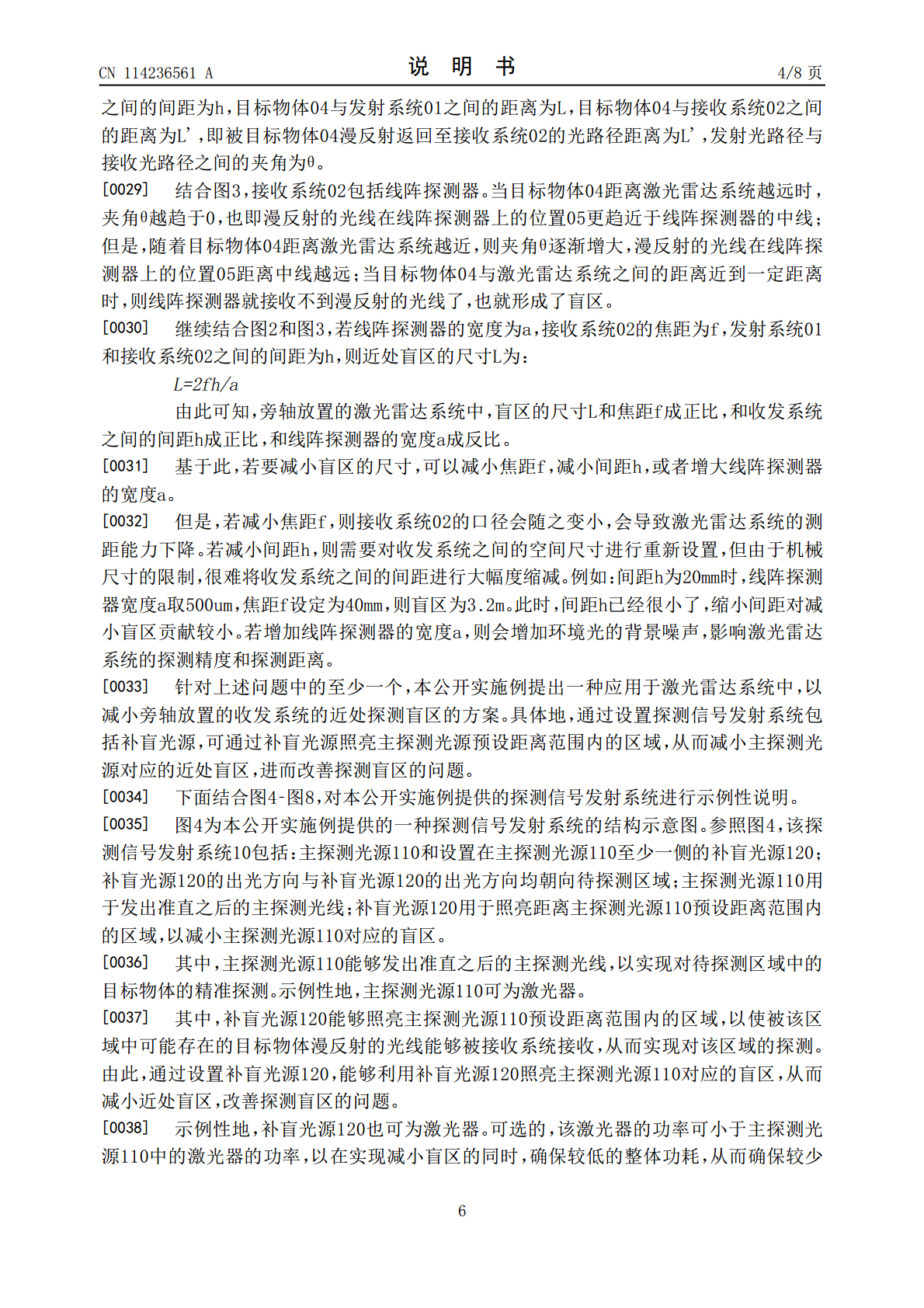
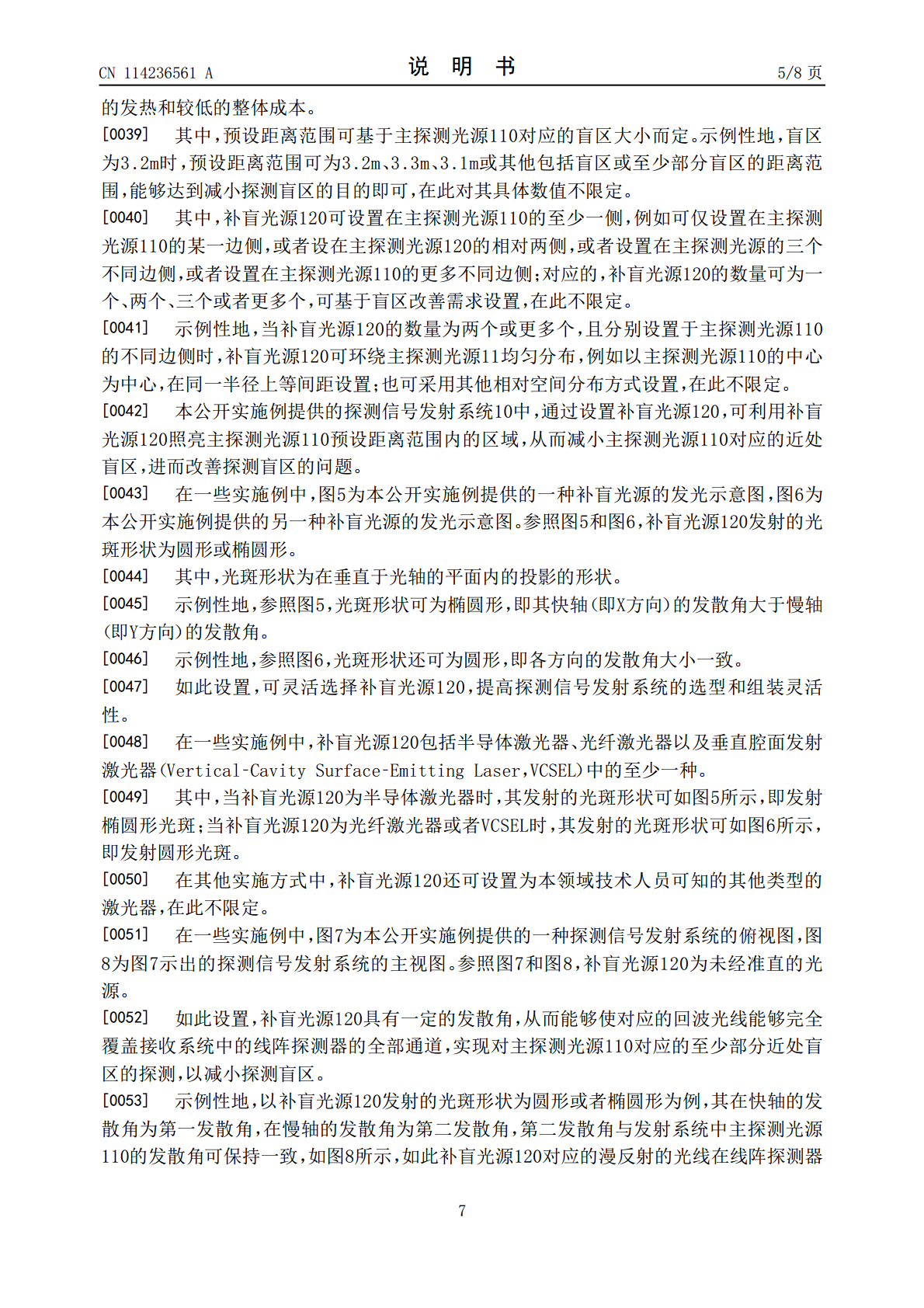
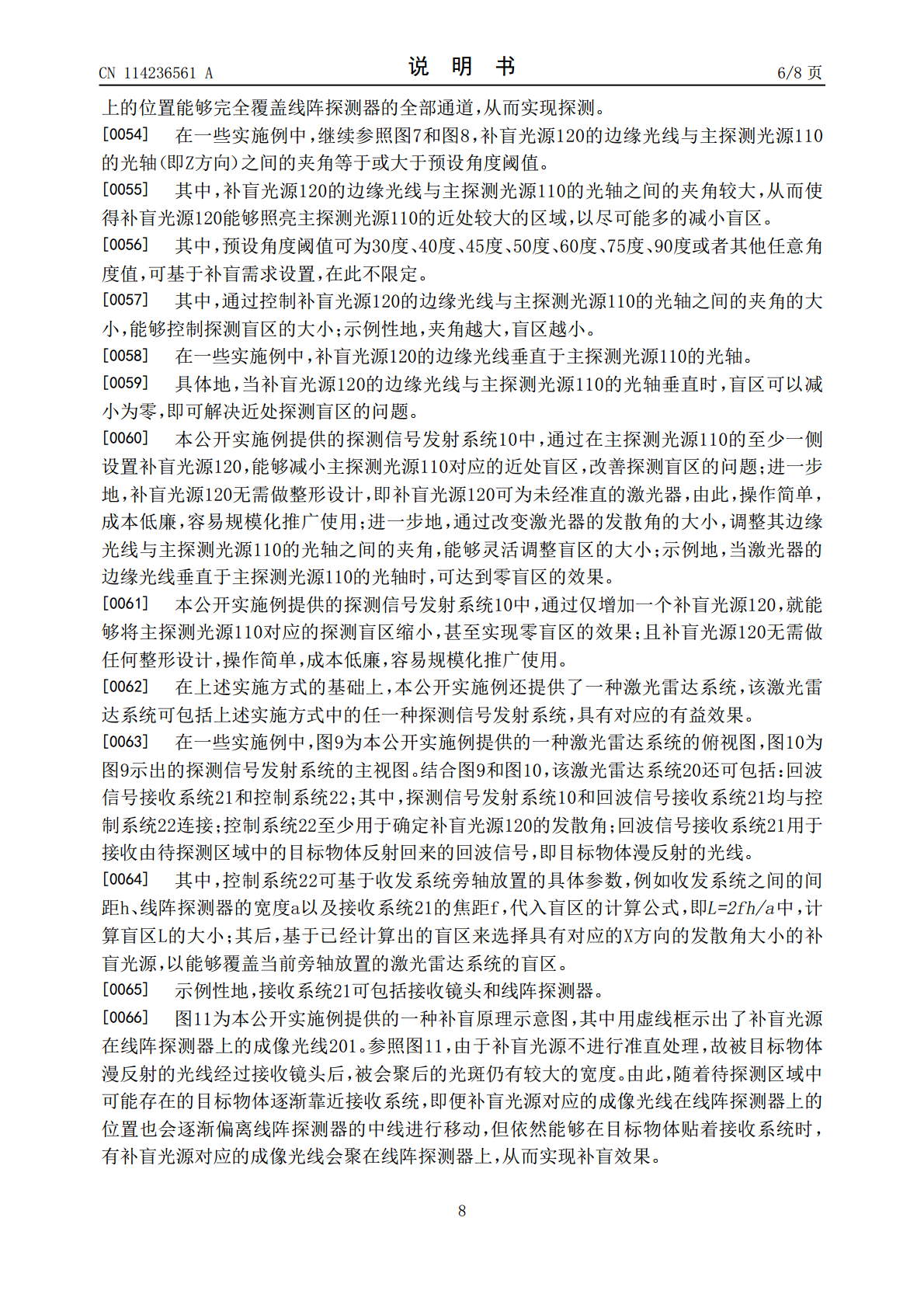
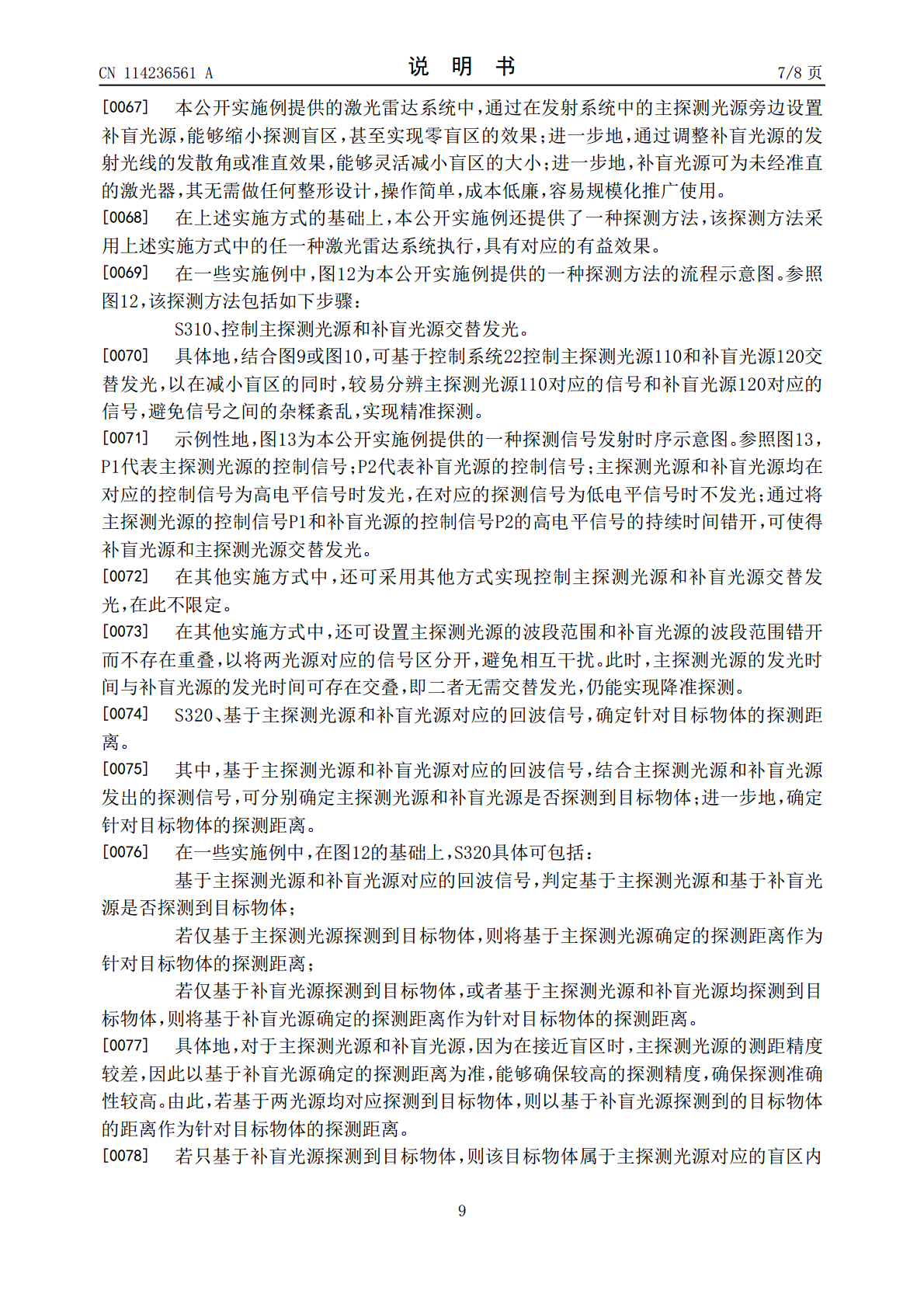
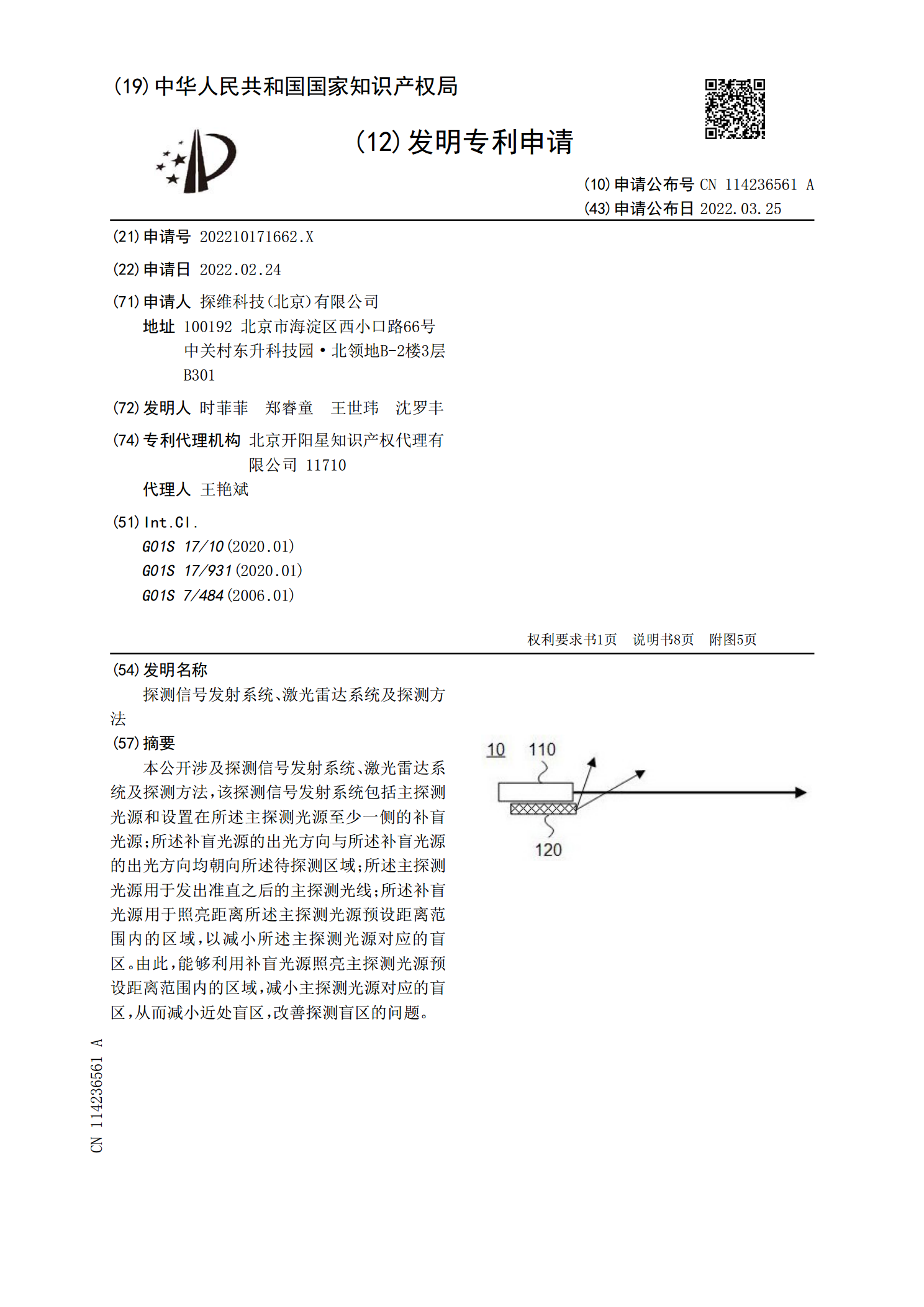
本公开涉及探测信号发射系统、激光雷达系统及探测方法,该探测信号发射系统包括主探测光源和设置在所述主探测光源至少一侧的补盲光源;所述补盲光源的出光方向与所述补盲光源的出光方向均朝向所述待探测区域;所述主探测光源用于发出准直之后的主探测光线;所述补盲光源用于照亮距离所述主探测光源预设距离范围内的区域,以减小所述主探测光源对应的盲区。由此,能够利用补盲光源照亮主探测光源预设距离范围内的区域,减小主探测光源对应的盲区,从而减小近处盲区,改善探测盲区的问题。
激光雷达感知系统及激光雷达感知系统探测方法.pdf
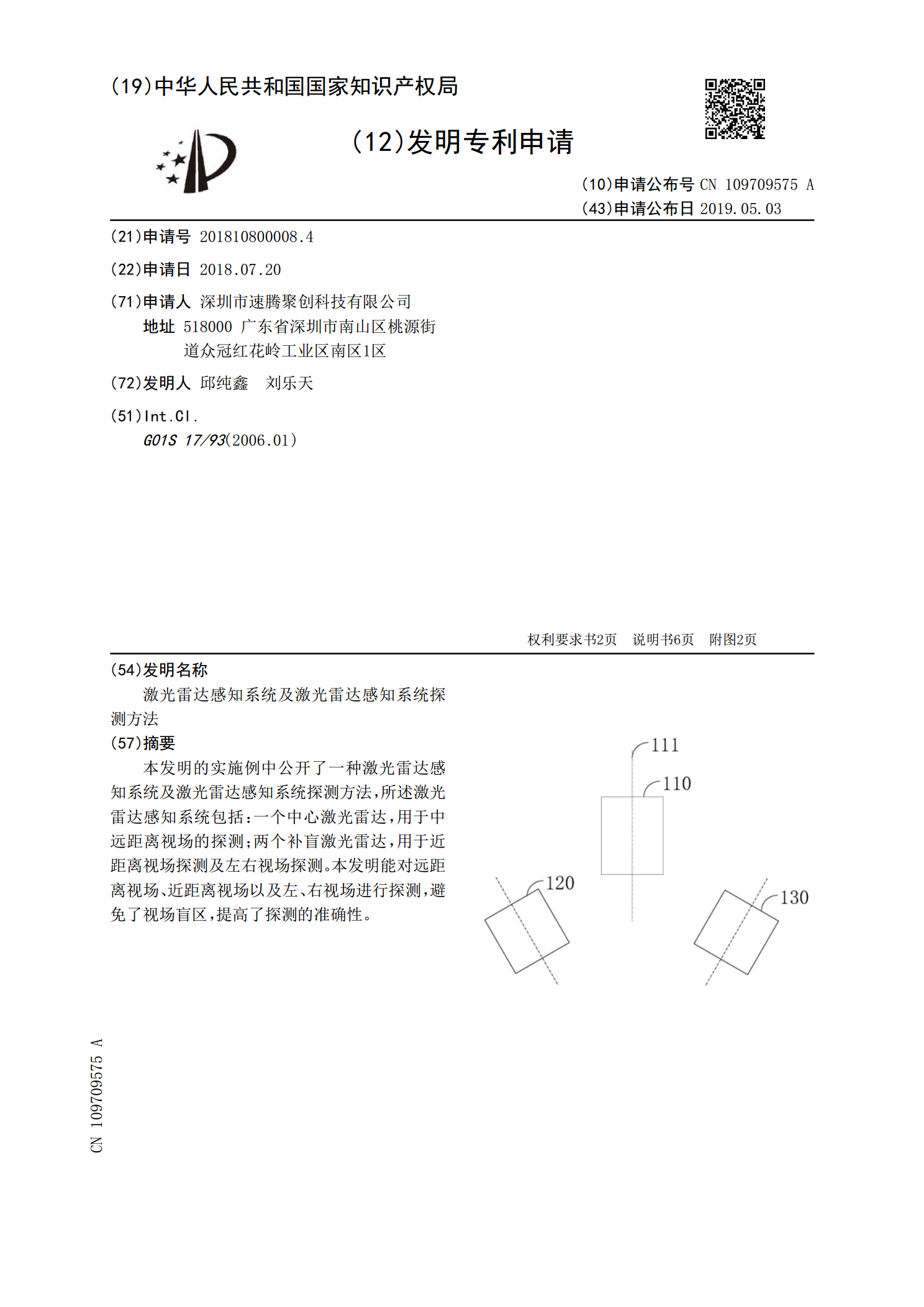
本发明的实施例中公开了一种激光雷达感知系统及激光雷达感知系统探测方法,所述激光雷达感知系统包括:一个中心激光雷达,用于中远距离视场的探测;两个补盲激光雷达,用于近距离视场探测及左右视场探测。本发明能对远距离视场、近距离视场以及左、右视场进行探测,避免了视场盲区,提高了探测的准确性。

激光雷达收发器、激光雷达探测系统及探测方法.pdf
本公开涉及一种激光雷达收发器、激光雷达探测系统及探测方法,该激光雷达收发器包括:至少两组激光器和至少两组探测器;至少两组激光器包括第一组激光器和第二组激光器,激光器用于发射探测信号至待探测区域;至少两组探测器包括第一组探测器和第二组探测器,探测器用于接收待探测区域内的目标物体反射的回波信号;其中,目标物体与激光雷达收发器之间的距离小于预设距离阈值时,第一组激光器发射的探测信号所对应的回波信号至少覆盖部分第二组探测器的接收面,第二组激光器发射的探测信号所对应的回波信号至少覆盖部分第一组探测器的接收面。如此设
激光雷达系统和激光雷达探测方法.pdf
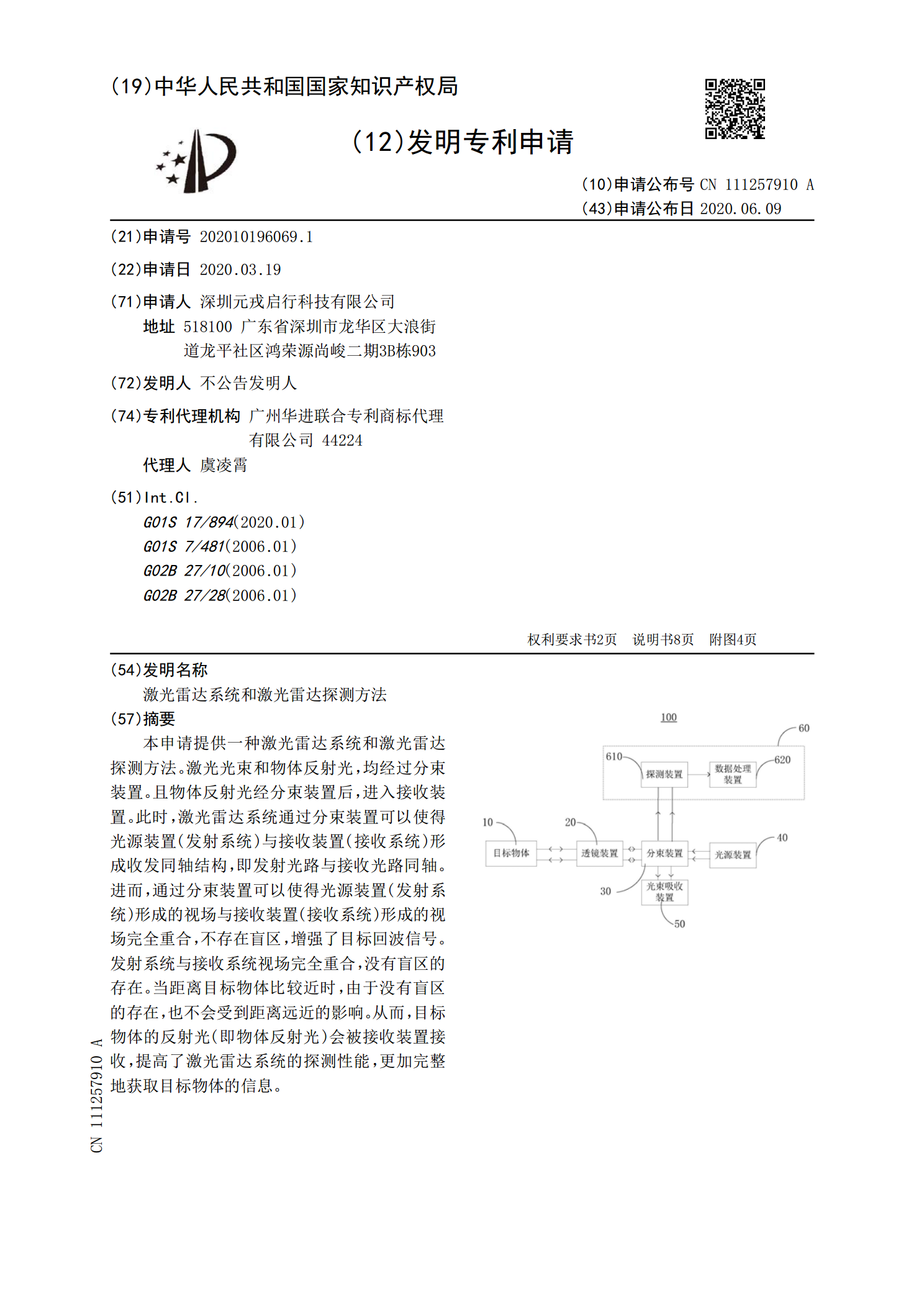
本申请提供一种激光雷达系统和激光雷达探测方法。激光光束和物体反射光,均经过分束装置。且物体反射光经分束装置后,进入接收装置。此时,激光雷达系统通过分束装置可以使得光源装置(发射系统)与接收装置(接收系统)形成收发同轴结构,即发射光路与接收光路同轴。进而,通过分束装置可以使得光源装置(发射系统)形成的视场与接收装置(接收系统)形成的视场完全重合,不存在盲区,增强了目标回波信号。发射系统与接收系统视场完全重合,没有盲区的存在。当距离目标物体比较近时,由于没有盲区的存在,也不会受到距离远近的影响。从而,目标物体
激光雷达系统、车辆以及激光雷达探测方法.pdf
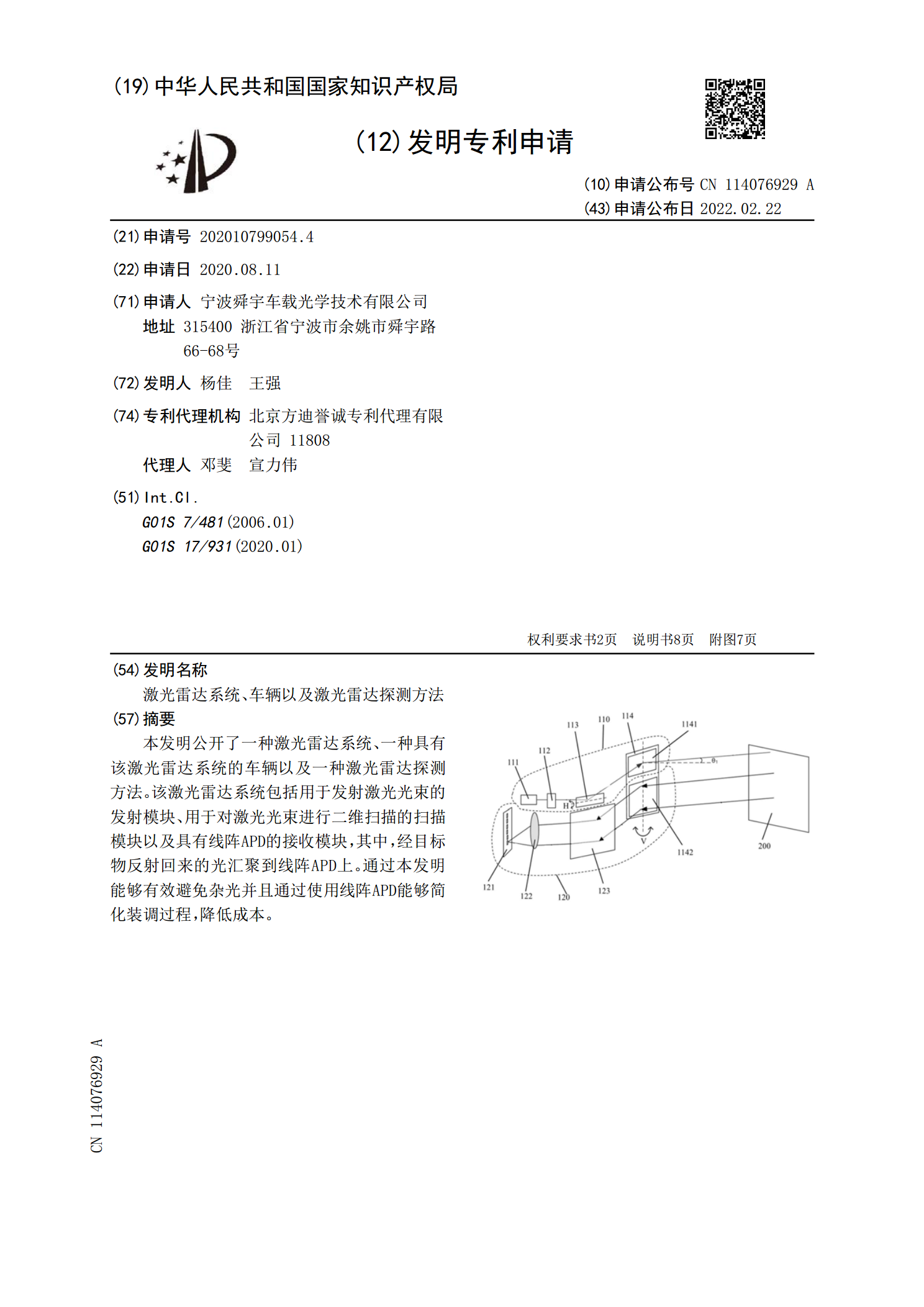
本发明公开了一种激光雷达系统、一种具有该激光雷达系统的车辆以及一种激光雷达探测方法。该激光雷达系统包括用于发射激光光束的发射模块、用于对激光光束进行二维扫描的扫描模块以及具有线阵APD的接收模块,其中,经目标物反射回来的光汇聚到线阵APD上。通过本发明能够有效避免杂光并且通过使用线阵APD能够简化装调过程,降低成本。