
一种基于视觉点胶机器人的点胶机构.pdf

盼易****君a

1/5

2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于视觉点胶机器人的点胶机构.pdf
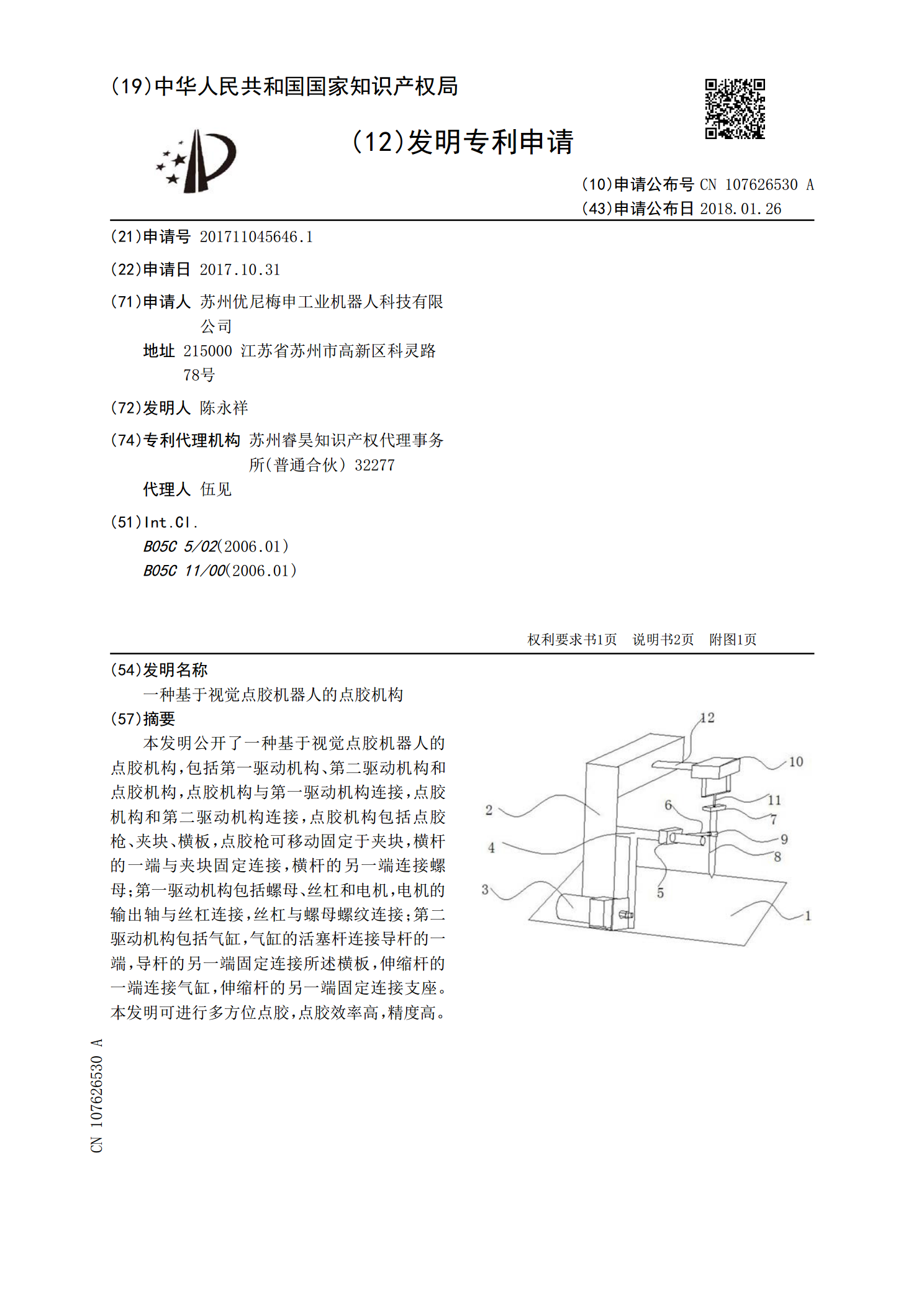
本发明公开了一种基于视觉点胶机器人的点胶机构,包括第一驱动机构、第二驱动机构和点胶机构,点胶机构与第一驱动机构连接,点胶机构和第二驱动机构连接,点胶机构包括点胶枪、夹块、横板,点胶枪可移动固定于夹块,横杆的一端与夹块固定连接,横杆的另一端连接螺母;第一驱动机构包括螺母、丝杠和电机,电机的输出轴与丝杠连接,丝杠与螺母螺纹连接;第二驱动机构包括气缸,气缸的活塞杆连接导杆的一端,导杆的另一端固定连接所述横板,伸缩杆的一端连接气缸,伸缩杆的另一端固定连接支座。本发明可进行多方位点胶,点胶效率高,精度高。

基于视觉的点胶机器人运动控制研究的中期报告.docx
基于视觉的点胶机器人运动控制研究的中期报告一、研究背景与意义点胶技术被广泛应用于电子、汽车、医疗等领域,其作用是将胶水涂抹到需要粘合的物体上,从而实现粘合的功能。传统的点胶方式需要手动操作,效率较低、精度不高、易出错等问题。因此,点胶机器人应运而生,可大幅提高生产效率和粘合质量。传统的点胶机器人具有错误补偿功能,但点胶准确性依赖于设备的机械结构,因此误差会产生积累,不利于提高点胶质量。基于视觉的点胶机器人可以通过视觉传感器获取物体图像信息,实时计算点胶位置和姿态,并根据计算结果调整机器人运动轨迹,从而提高
一种点胶机及点胶方法.pdf
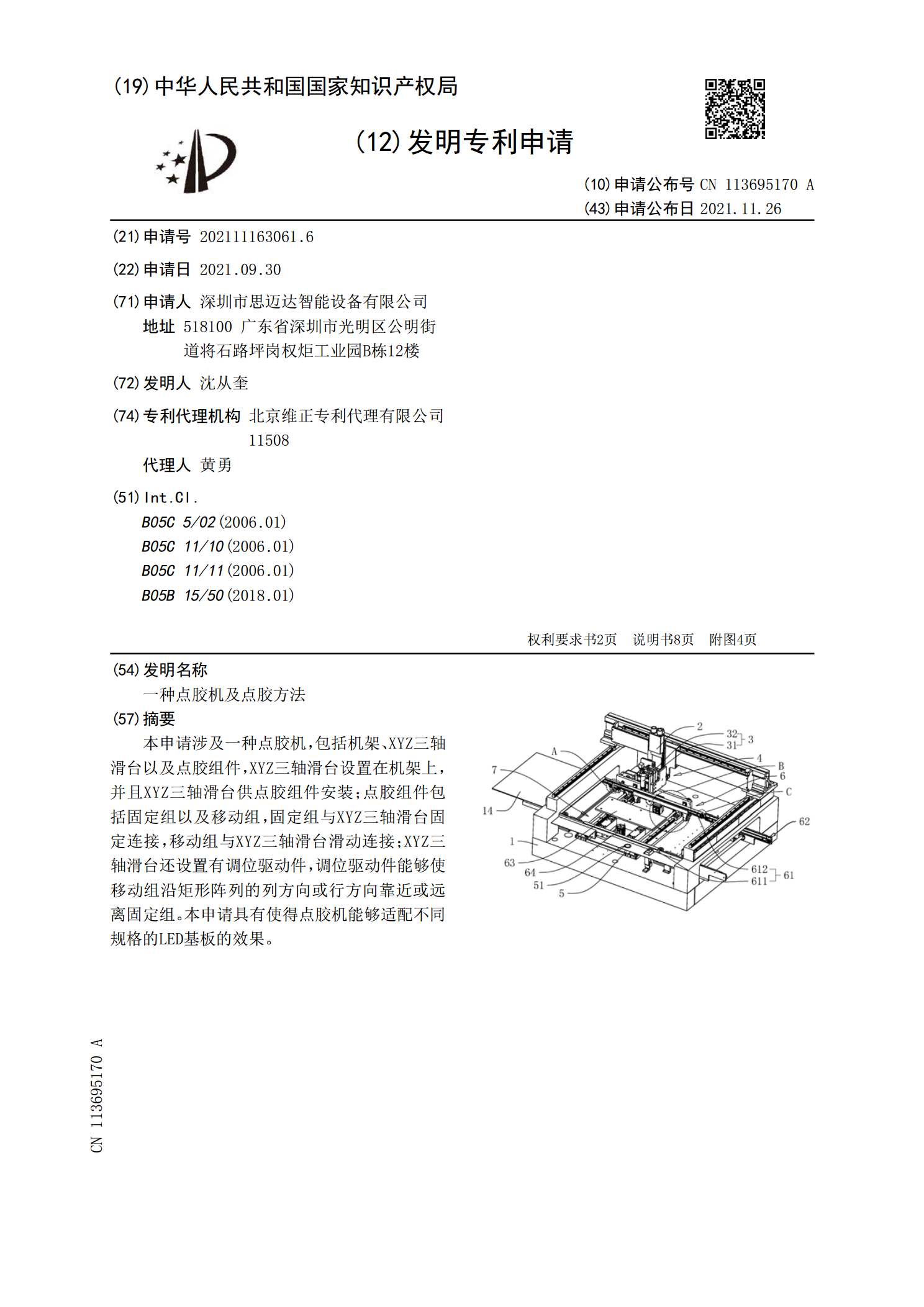
本申请涉及一种点胶机,包括机架、XYZ三轴滑台以及点胶组件,XYZ三轴滑台设置在机架上,并且XYZ三轴滑台供点胶组件安装;点胶组件包括固定组以及移动组,固定组与XYZ三轴滑台固定连接,移动组与XYZ三轴滑台滑动连接;XYZ三轴滑台还设置有调位驱动件,调位驱动件能够使移动组沿矩形阵列的列方向或行方向靠近或远离固定组。本申请具有使得点胶机能够适配不同规格的LED基板的效果。
一种基于视觉定位技术的点胶机双向视觉识别装置.pdf
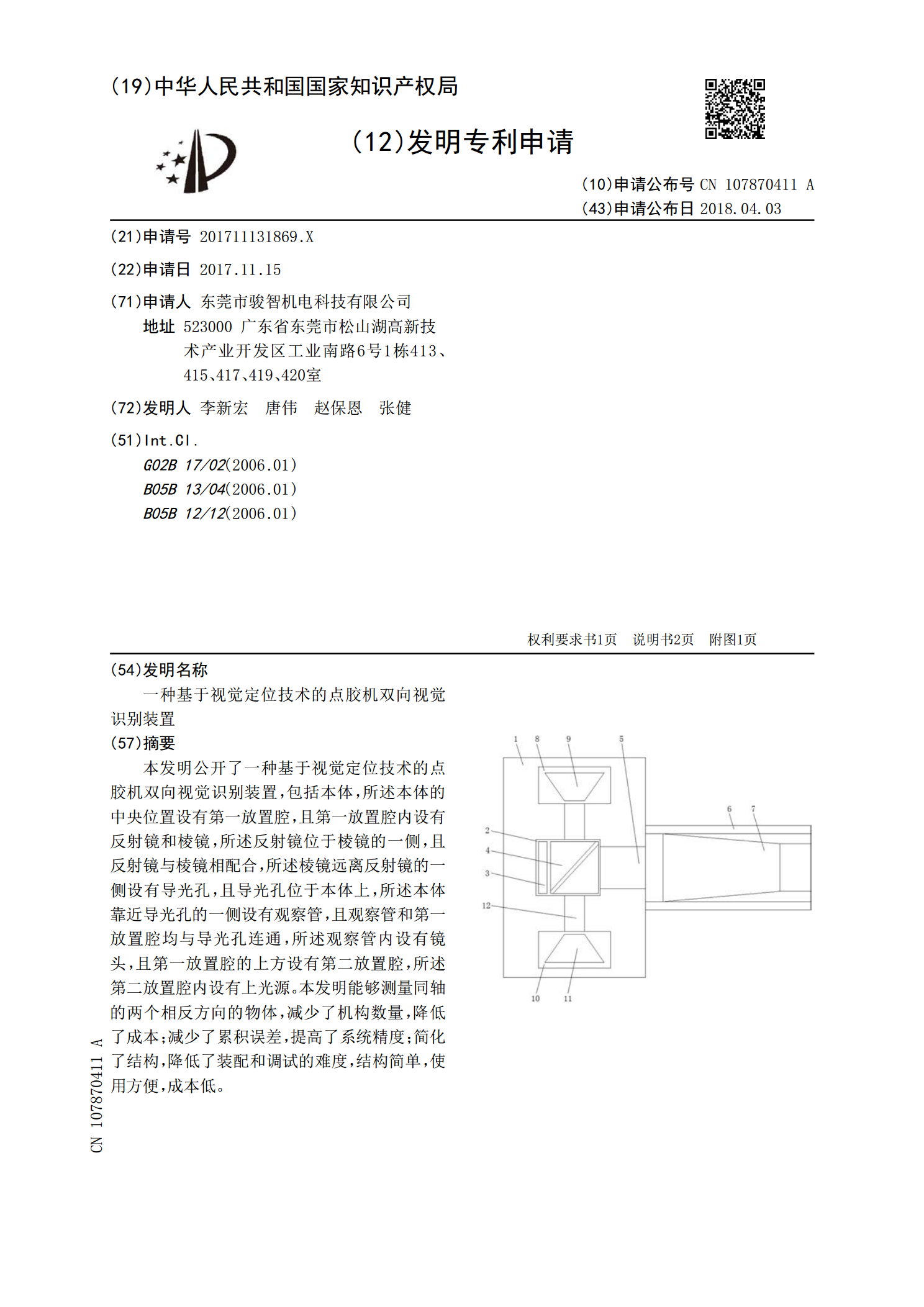
本发明公开了一种基于视觉定位技术的点胶机双向视觉识别装置,包括本体,所述本体的中央位置设有第一放置腔,且第一放置腔内设有反射镜和棱镜,所述反射镜位于棱镜的一侧,且反射镜与棱镜相配合,所述棱镜远离反射镜的一侧设有导光孔,且导光孔位于本体上,所述本体靠近导光孔的一侧设有观察管,且观察管和第一放置腔均与导光孔连通,所述观察管内设有镜头,且第一放置腔的上方设有第二放置腔,所述第二放置腔内设有上光源。本发明能够测量同轴的两个相反方向的物体,减少了机构数量,降低了成本;减少了累积误差,提高了系统精度;简化了结构,降低
一种点胶机的点胶头组件.pdf
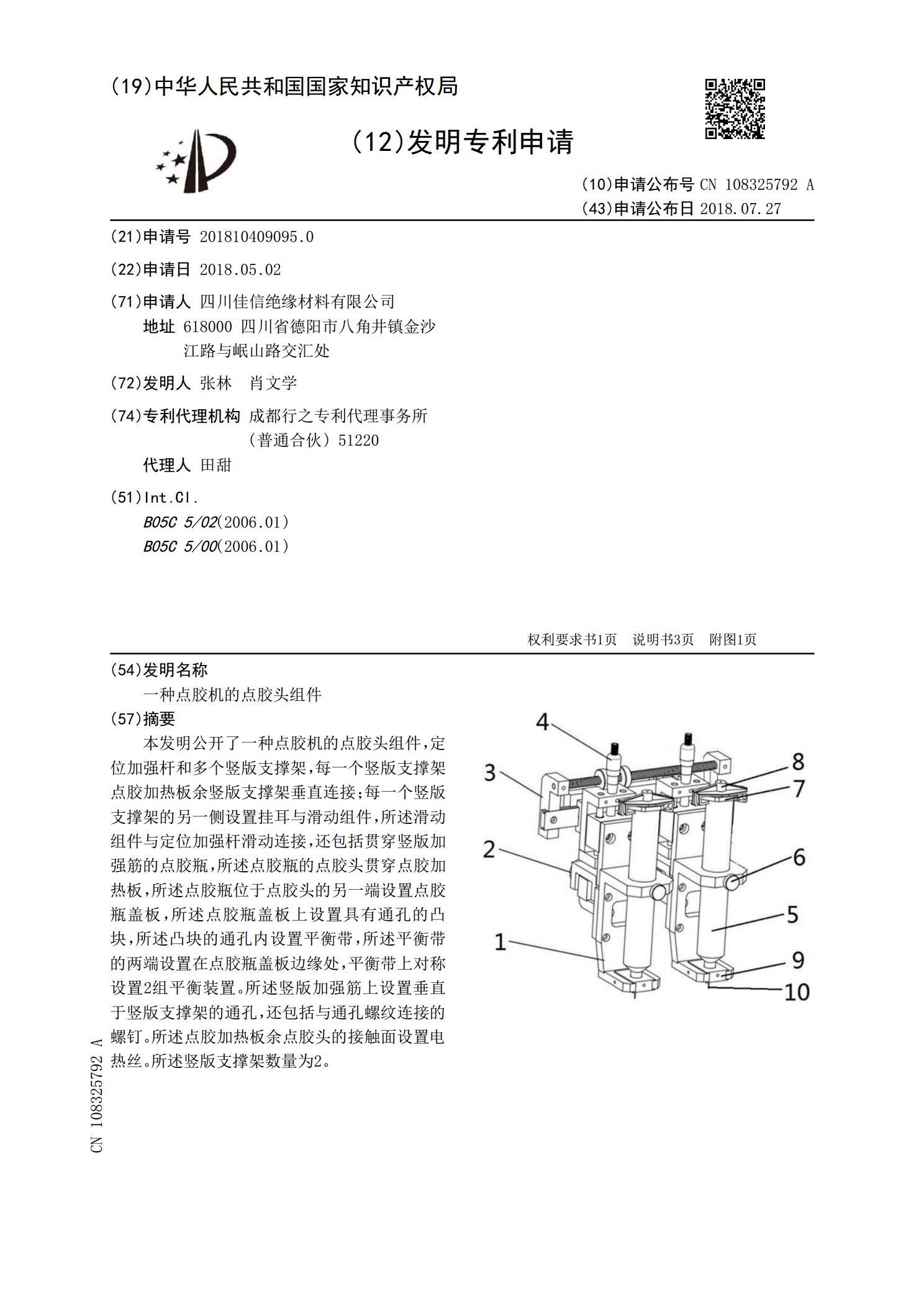
本发明公开了一种点胶机的点胶头组件,定位加强杆和多个竖版支撑架,每一个竖版支撑架点胶加热板余竖版支撑架垂直连接;每一个竖版支撑架的另一侧设置挂耳与滑动组件,所述滑动组件与定位加强杆滑动连接,还包括贯穿竖版加强筋的点胶瓶,所述点胶瓶的点胶头贯穿点胶加热板,所述点胶瓶位于点胶头的另一端设置点胶瓶盖板,所述点胶瓶盖板上设置具有通孔的凸块,所述凸块的通孔内设置平衡带,所述平衡带的两端设置在点胶瓶盖板边缘处,平衡带上对称设置2组平衡装置。所述竖版加强筋上设置垂直于竖版支撑架的通孔,还包括与通孔螺纹连接的螺钉。所述点