
一种双臂测量用机械臂装置.pdf

和裕****az

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双臂测量用机械臂装置.pdf
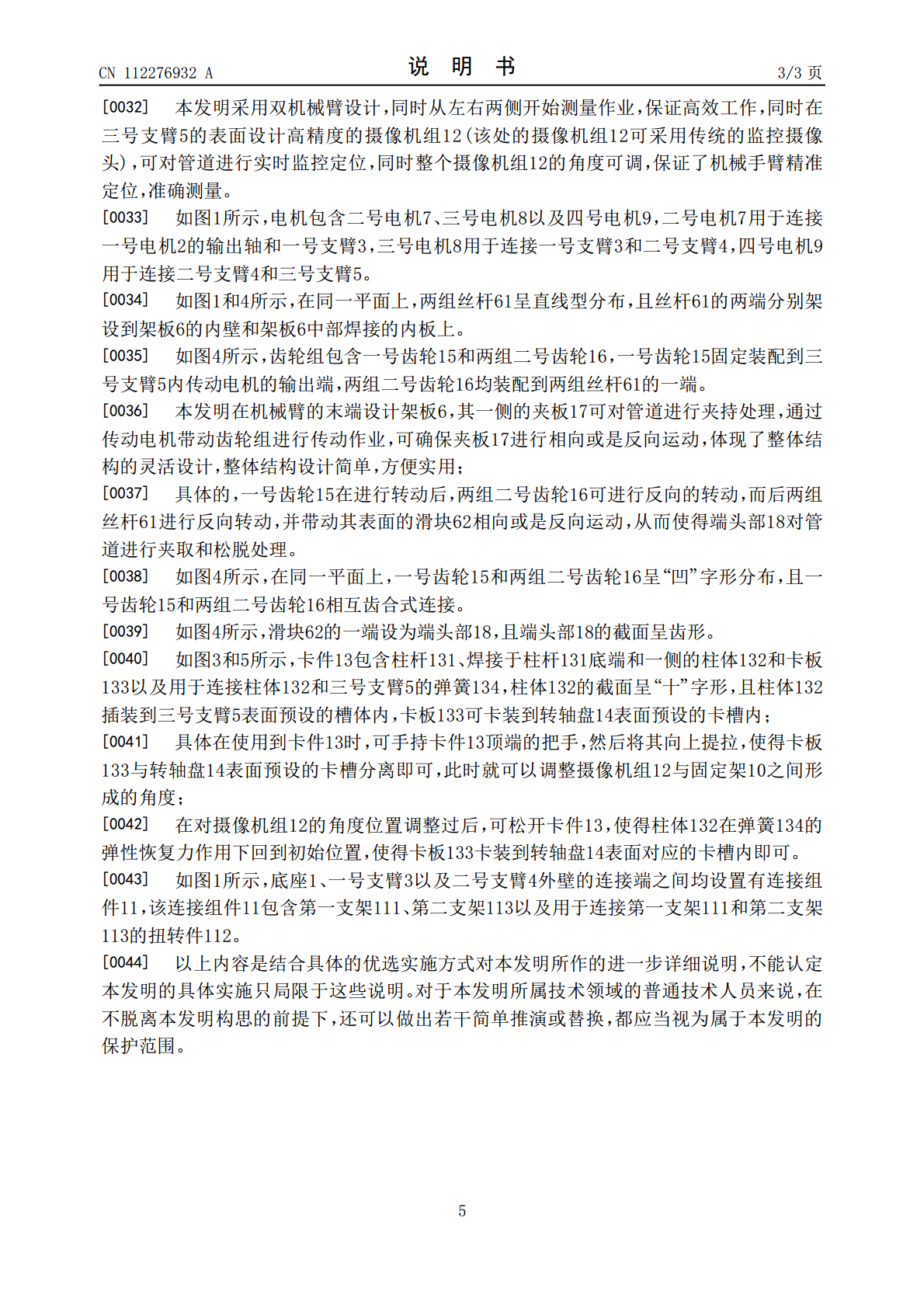
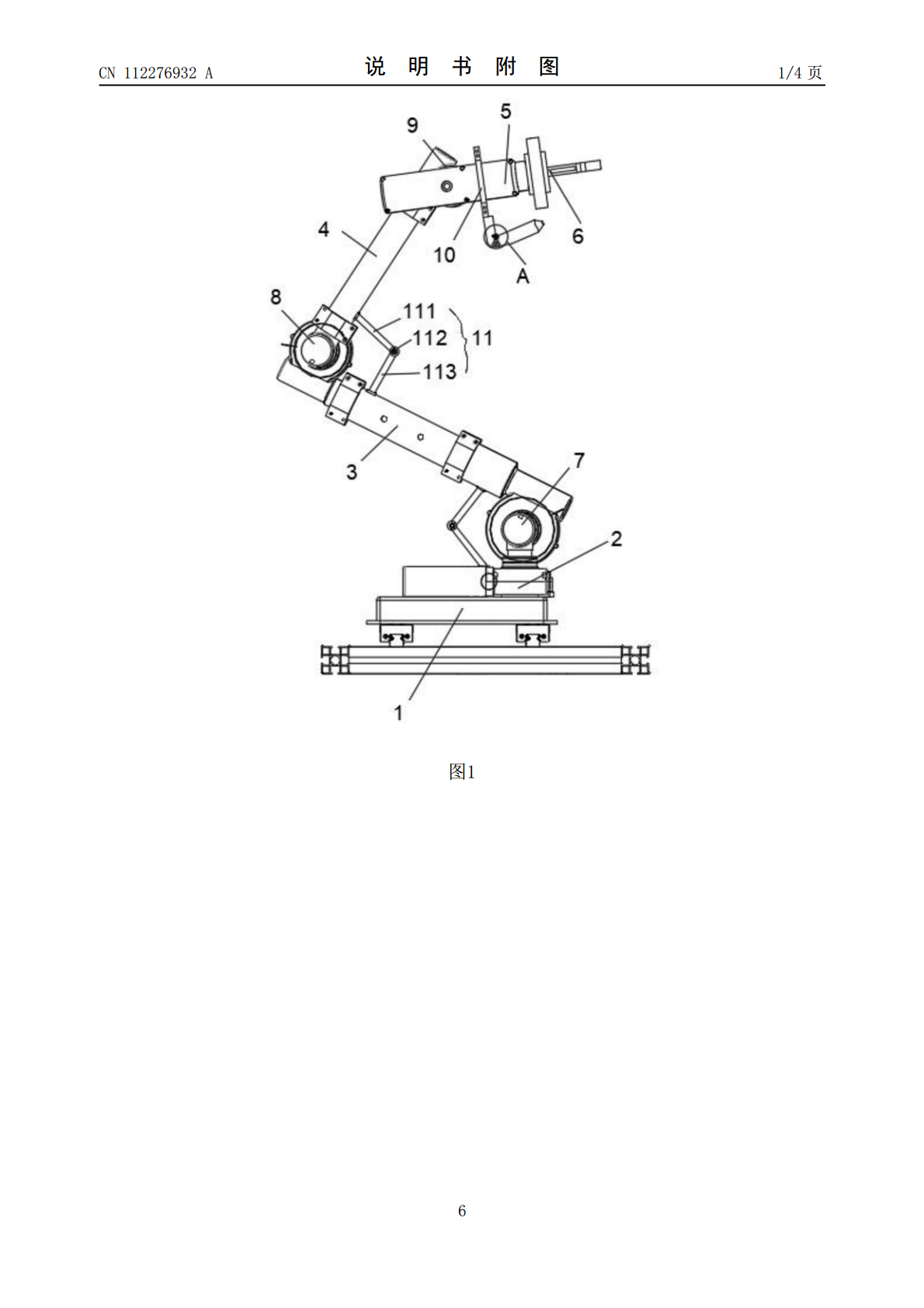
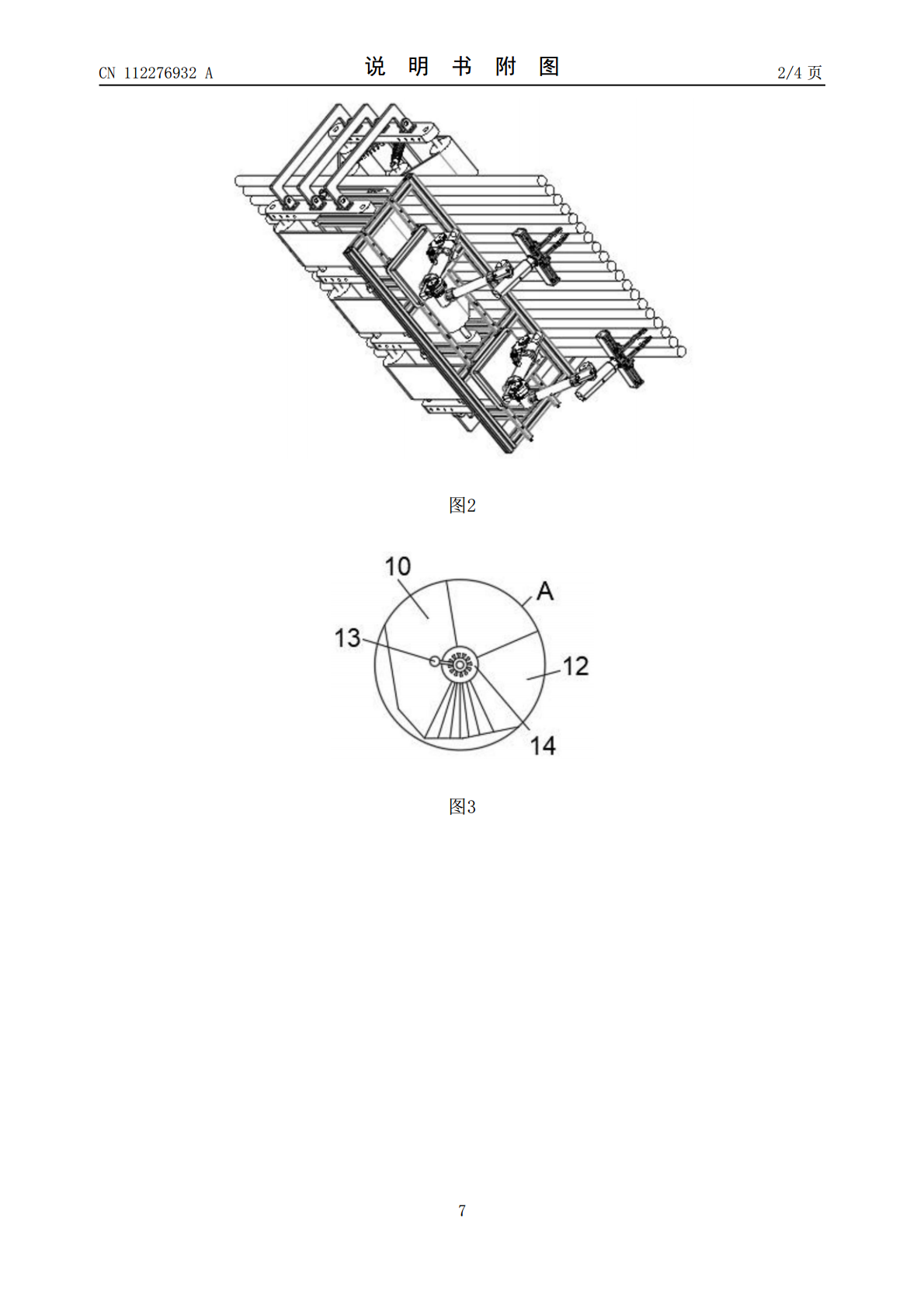
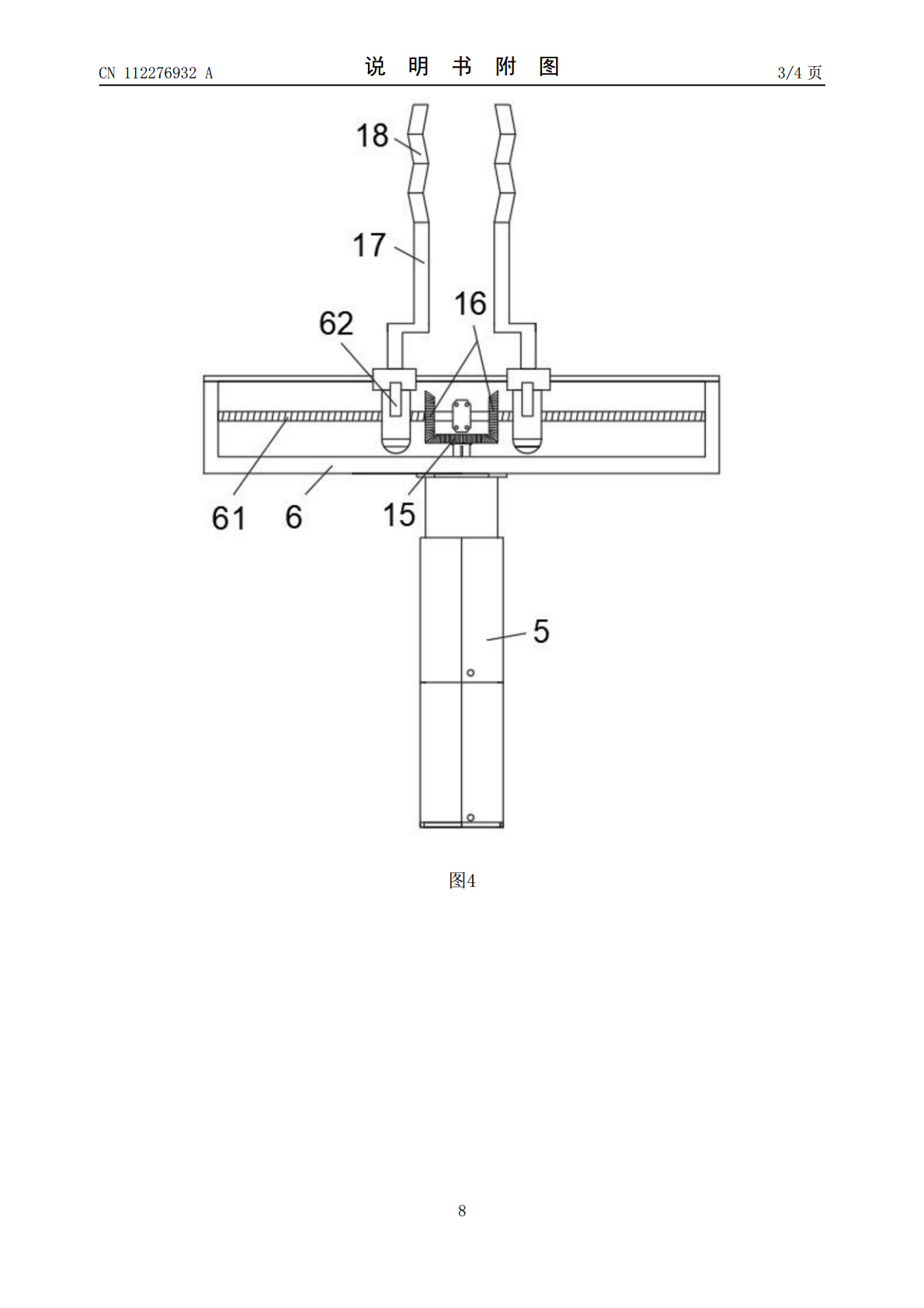
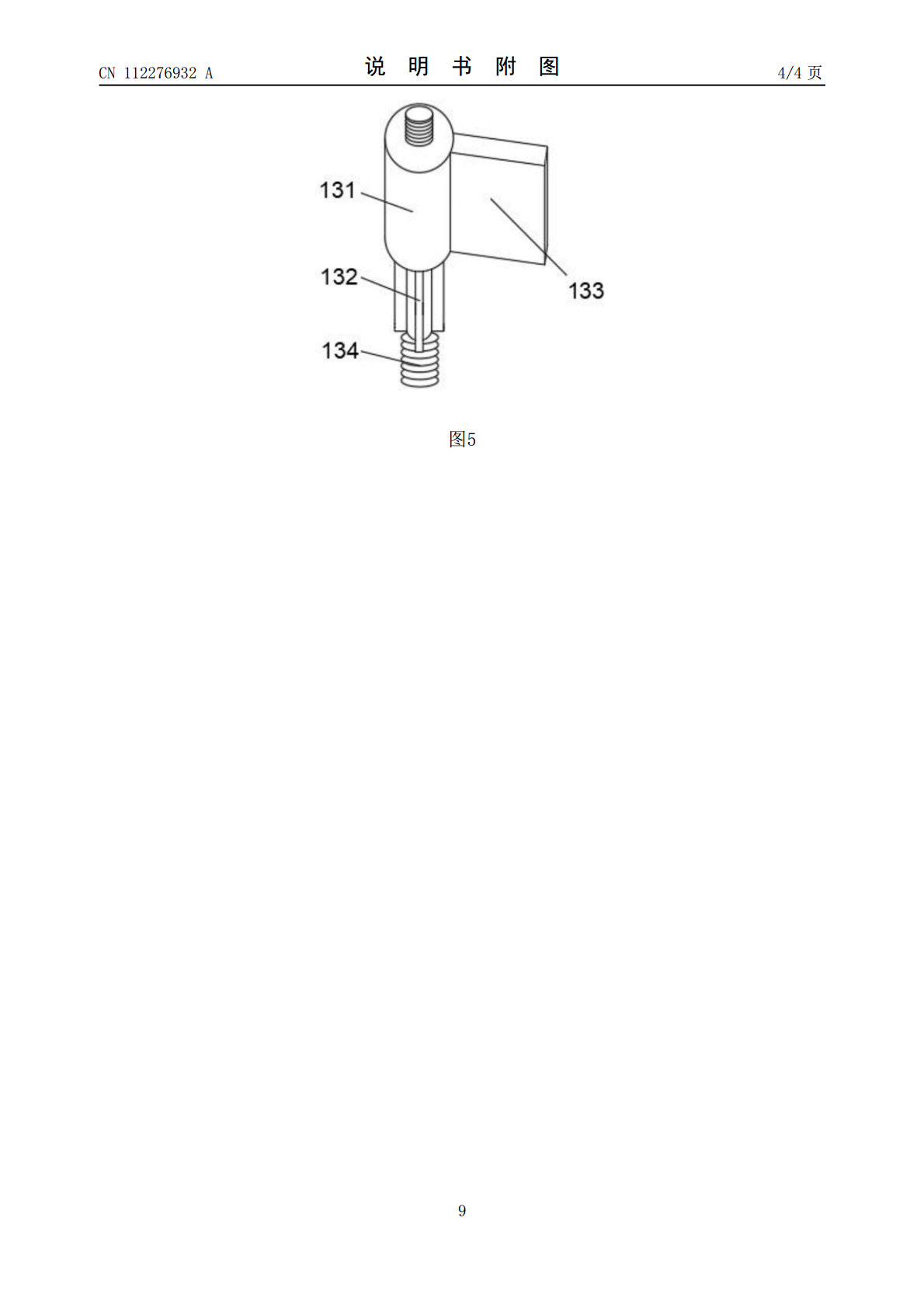
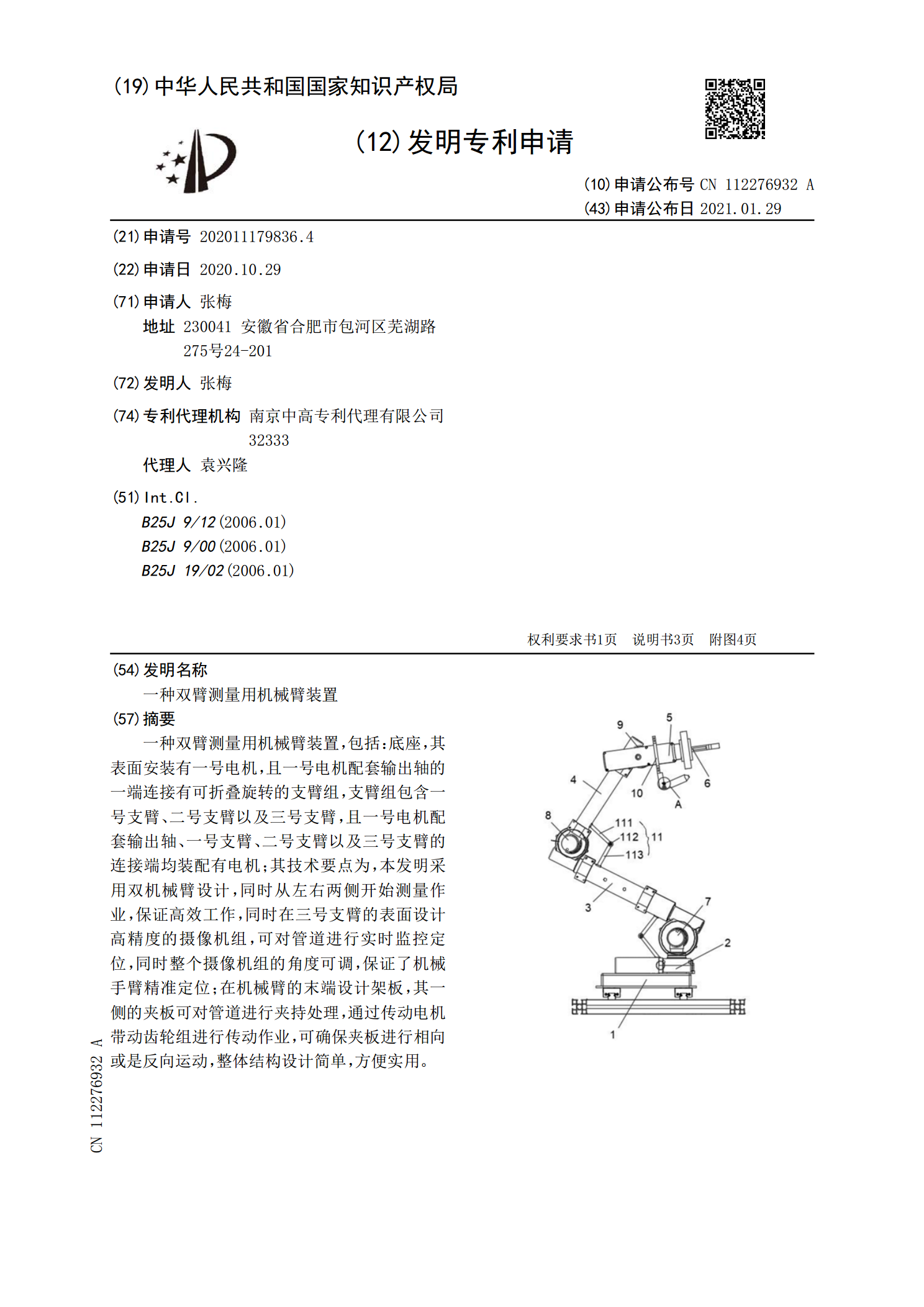
一种双臂测量用机械臂装置,包括:底座,其表面安装有一号电机,且一号电机配套输出轴的一端连接有可折叠旋转的支臂组,支臂组包含一号支臂、二号支臂以及三号支臂,且一号电机配套输出轴、一号支臂、二号支臂以及三号支臂的连接端均装配有电机;其技术要点为,本发明采用双机械臂设计,同时从左右两侧开始测量作业,保证高效工作,同时在三号支臂的表面设计高精度的摄像机组,可对管道进行实时监控定位,同时整个摄像机组的角度可调,保证了机械手臂精准定位;在机械臂的末端设计架板,其一侧的夹板可对管道进行夹持处理,通过传动电机带动齿轮组进
一种铁皮石斛组培双臂机械臂.pdf
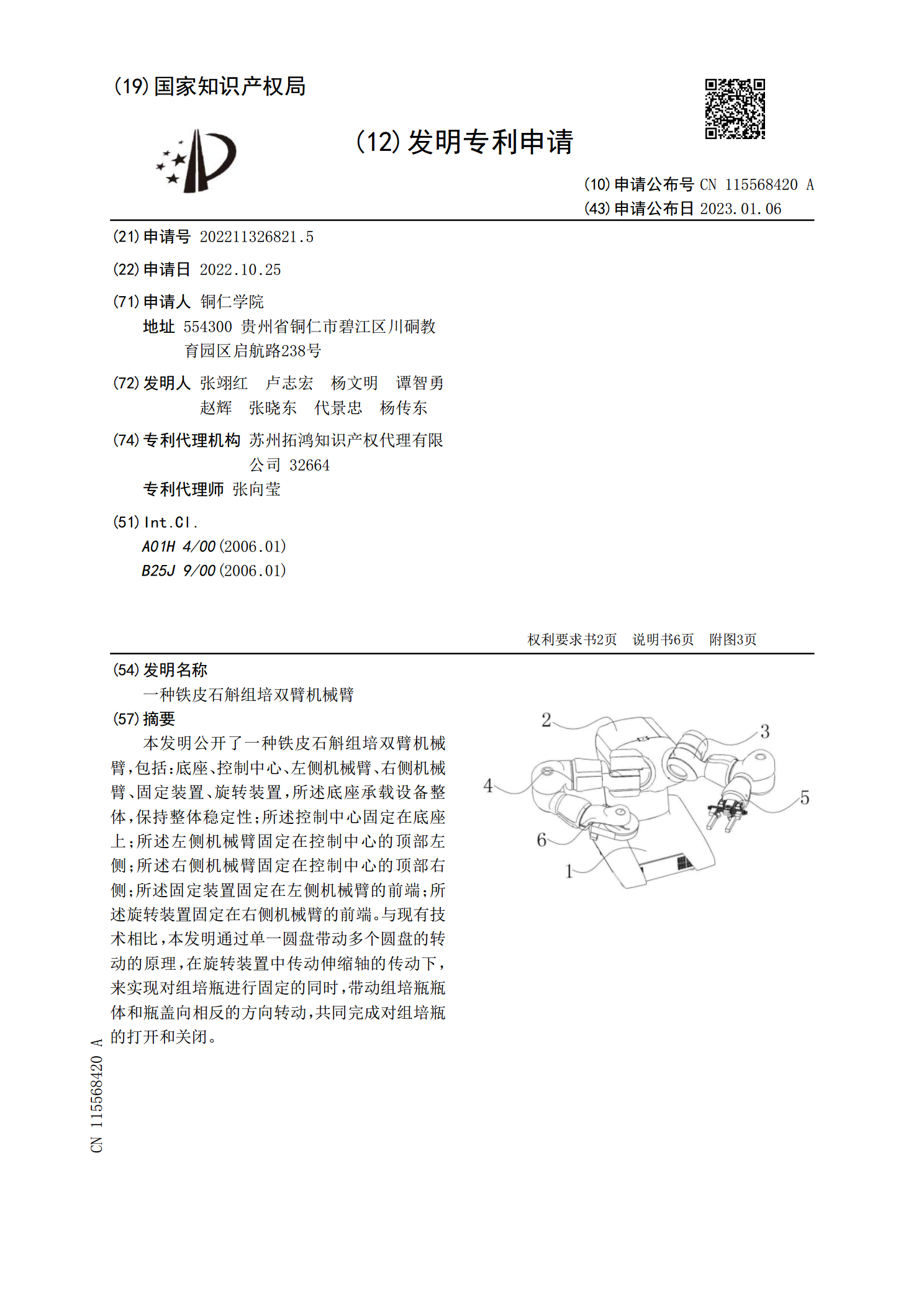
本发明公开了一种铁皮石斛组培双臂机械臂,包括:底座、控制中心、左侧机械臂、右侧机械臂、固定装置、旋转装置,所述底座承载设备整体,保持整体稳定性;所述控制中心固定在底座上;所述左侧机械臂固定在控制中心的顶部左侧;所述右侧机械臂固定在控制中心的顶部右侧;所述固定装置固定在左侧机械臂的前端;所述旋转装置固定在右侧机械臂的前端。与现有技术相比,本发明通过单一圆盘带动多个圆盘的转动的原理,在旋转装置中传动伸缩轴的传动下,来实现对组培瓶进行固定的同时,带动组培瓶瓶体和瓶盖向相反的方向转动,共同完成对组培瓶的打开和关闭
一种机械臂用支撑装置.pdf
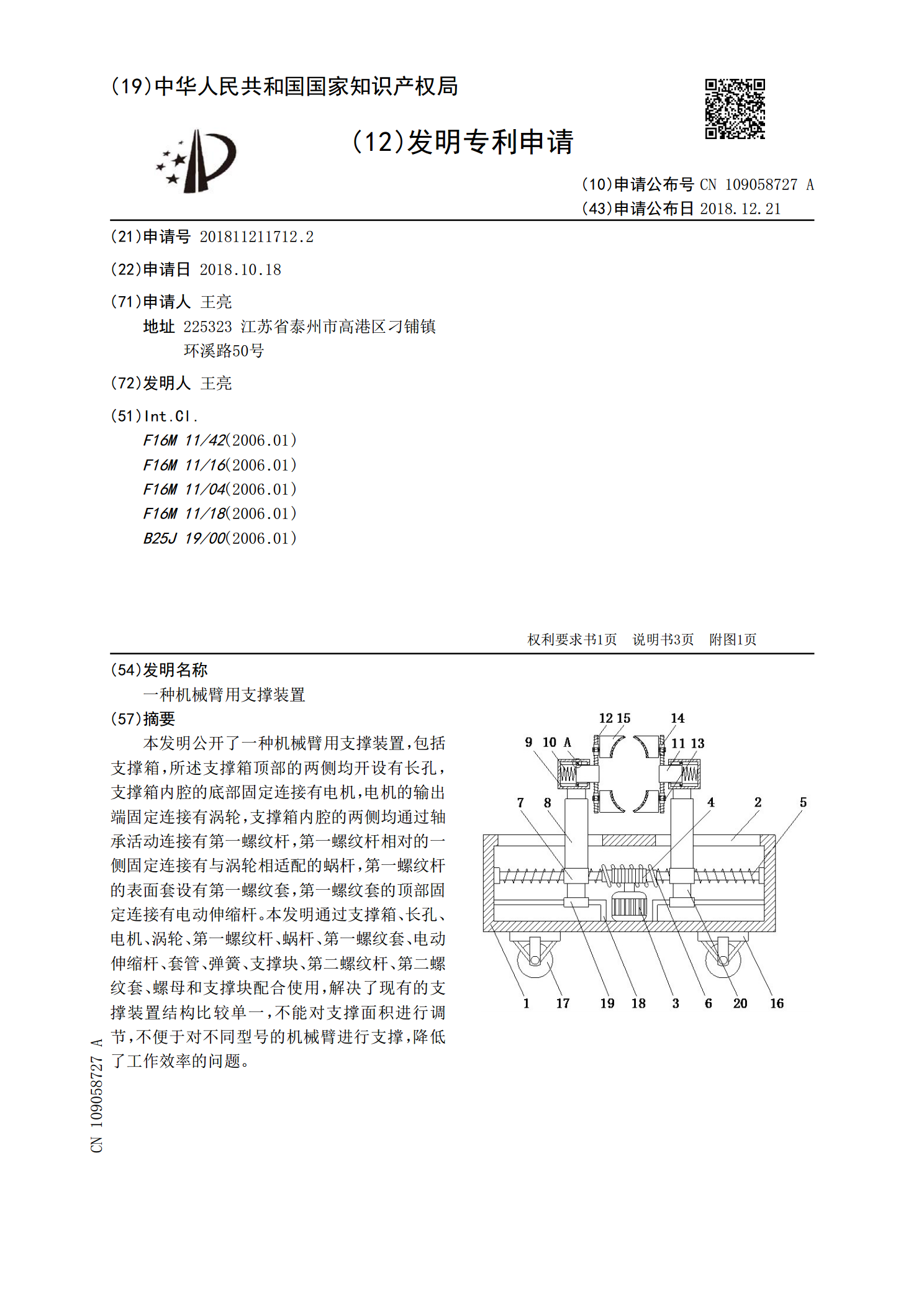
本发明公开了一种机械臂用支撑装置,包括支撑箱,所述支撑箱顶部的两侧均开设有长孔,支撑箱内腔的底部固定连接有电机,电机的输出端固定连接有涡轮,支撑箱内腔的两侧均通过轴承活动连接有第一螺纹杆,第一螺纹杆相对的一侧固定连接有与涡轮相适配的蜗杆,第一螺纹杆的表面套设有第一螺纹套,第一螺纹套的顶部固定连接有电动伸缩杆。本发明通过支撑箱、长孔、电机、涡轮、第一螺纹杆、蜗杆、第一螺纹套、电动伸缩杆、套管、弹簧、支撑块、第二螺纹杆、第二螺纹套、螺母和支撑块配合使用,解决了现有的支撑装置结构比较单一,不能对支撑面积进行调节
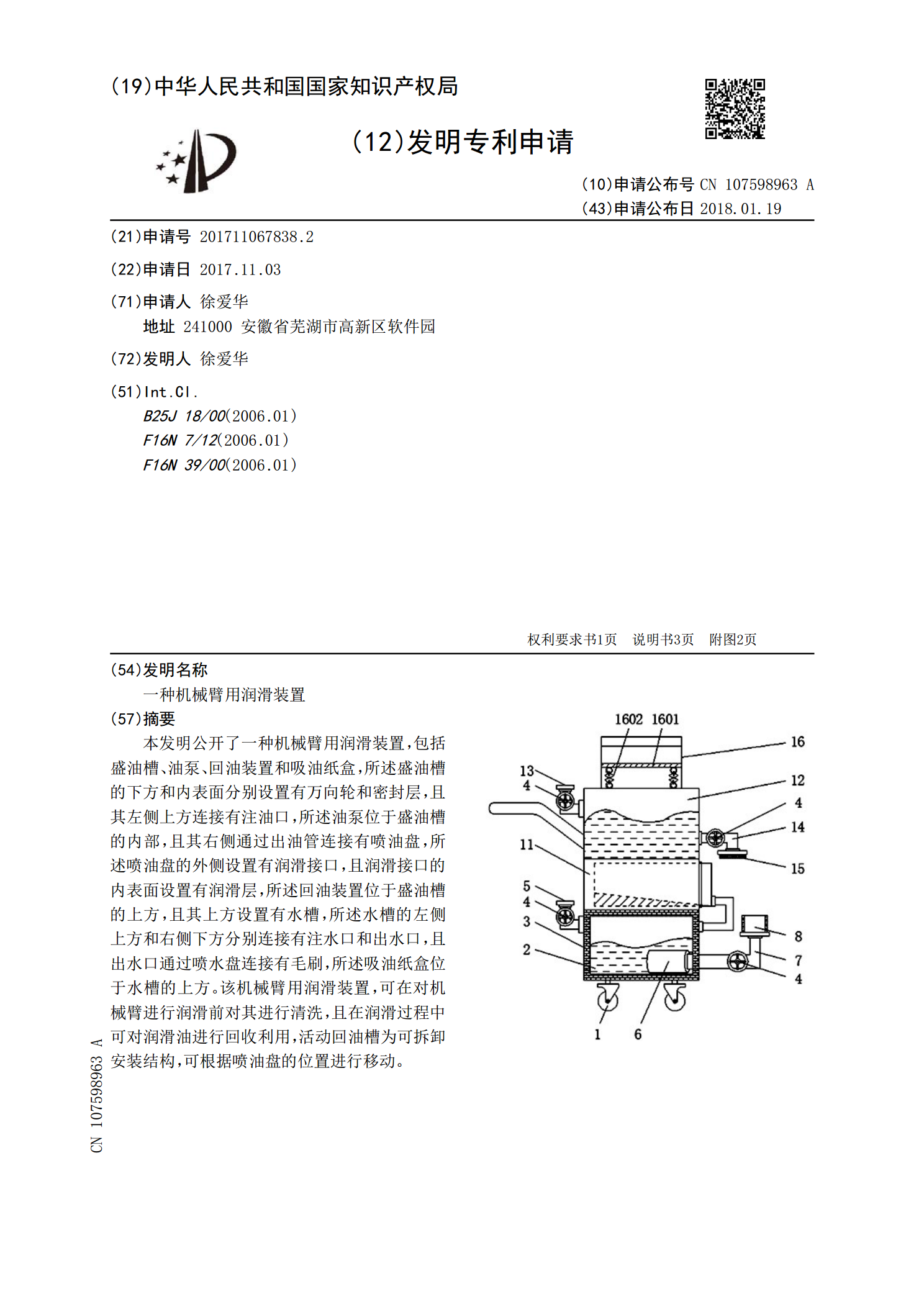
一种机械臂用润滑装置.pdf
本发明公开了一种机械臂用润滑装置,包括盛油槽、油泵、回油装置和吸油纸盒,所述盛油槽的下方和内表面分别设置有万向轮和密封层,且其左侧上方连接有注油口,所述油泵位于盛油槽的内部,且其右侧通过出油管连接有喷油盘,所述喷油盘的外侧设置有润滑接口,且润滑接口的内表面设置有润滑层,所述回油装置位于盛油槽的上方,且其上方设置有水槽,所述水槽的左侧上方和右侧下方分别连接有注水口和出水口,且出水口通过喷水盘连接有毛刷,所述吸油纸盒位于水槽的上方。该机械臂用润滑装置,可在对机械臂进行润滑前对其进行清洗,且在润滑过程中可对润滑
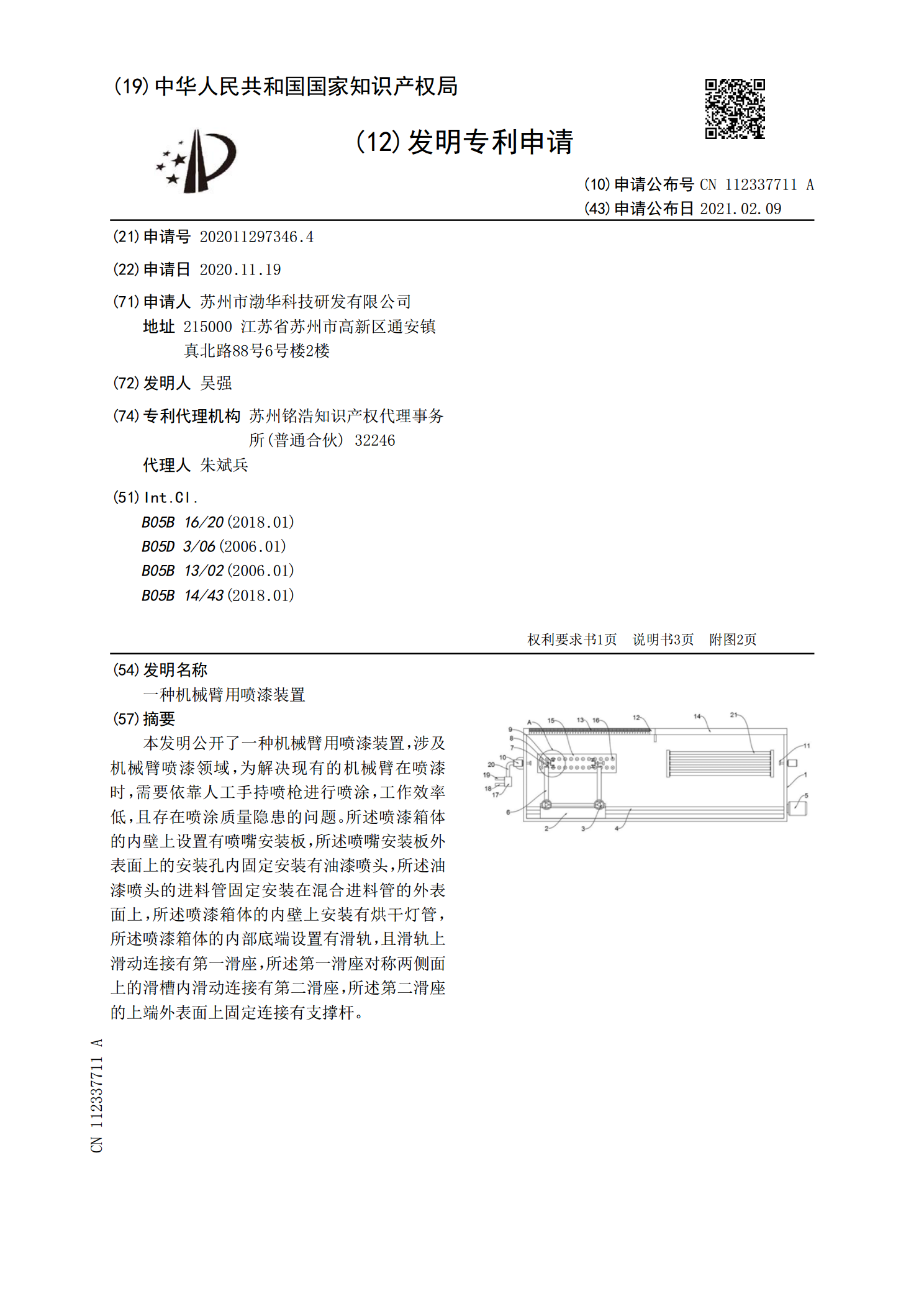
一种机械臂用喷漆装置.pdf
本发明公开了一种机械臂用喷漆装置,涉及机械臂喷漆领域,为解决现有的机械臂在喷漆时,需要依靠人工手持喷枪进行喷涂,工作效率低,且存在喷涂质量隐患的问题。所述喷漆箱体的内壁上设置有喷嘴安装板,所述喷嘴安装板外表面上的安装孔内固定安装有油漆喷头,所述油漆喷头的进料管固定安装在混合进料管的外表面上,所述喷漆箱体的内壁上安装有烘干灯管,所述喷漆箱体的内部底端设置有滑轨,且滑轨上滑动连接有第一滑座,所述第一滑座对称两侧面上的滑槽内滑动连接有第二滑座,所述第二滑座的上端外表面上固定连接有支撑杆。