
一种智能机械手夹持组件.pdf

一只****写意

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能机械手夹持组件.pdf
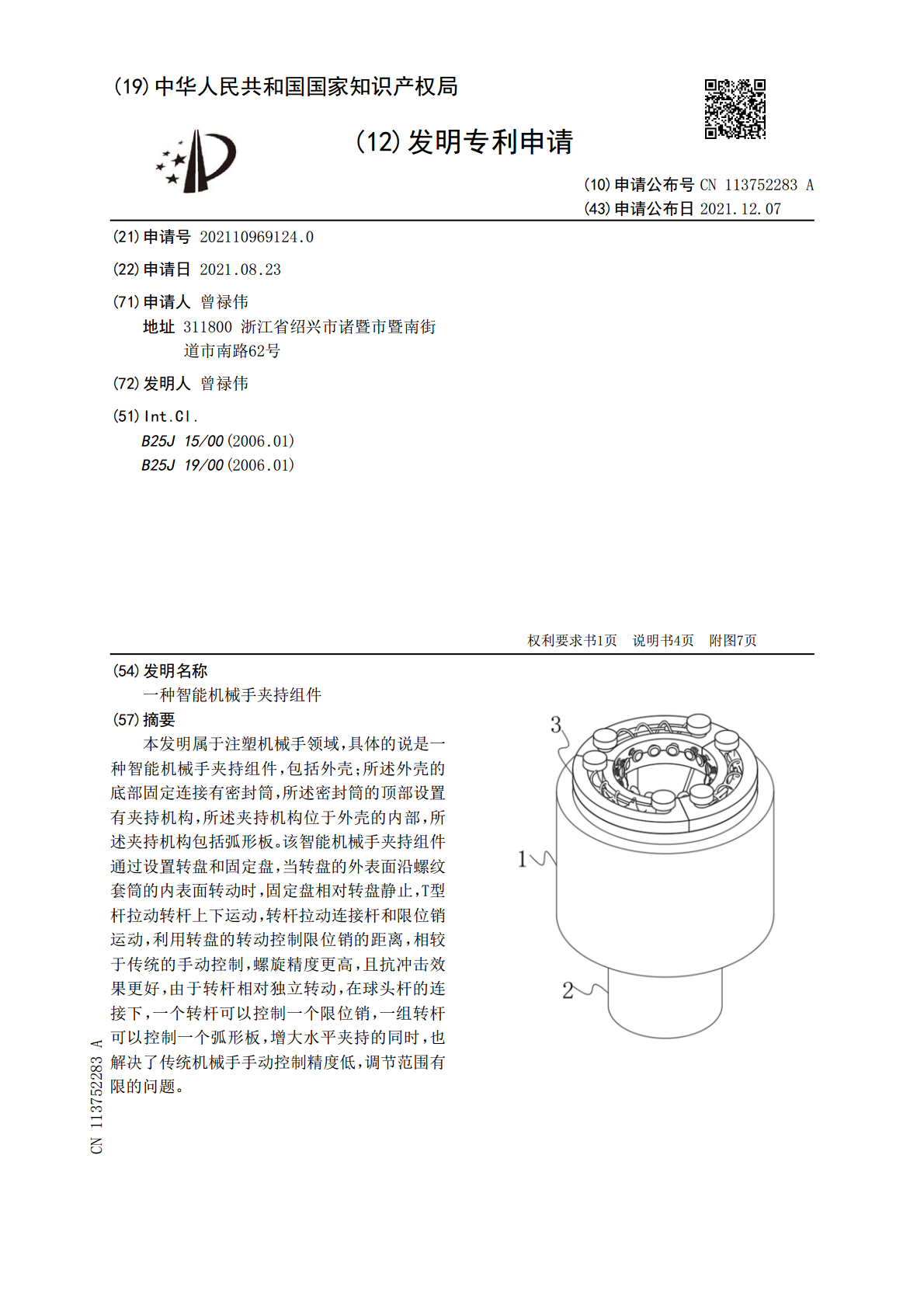
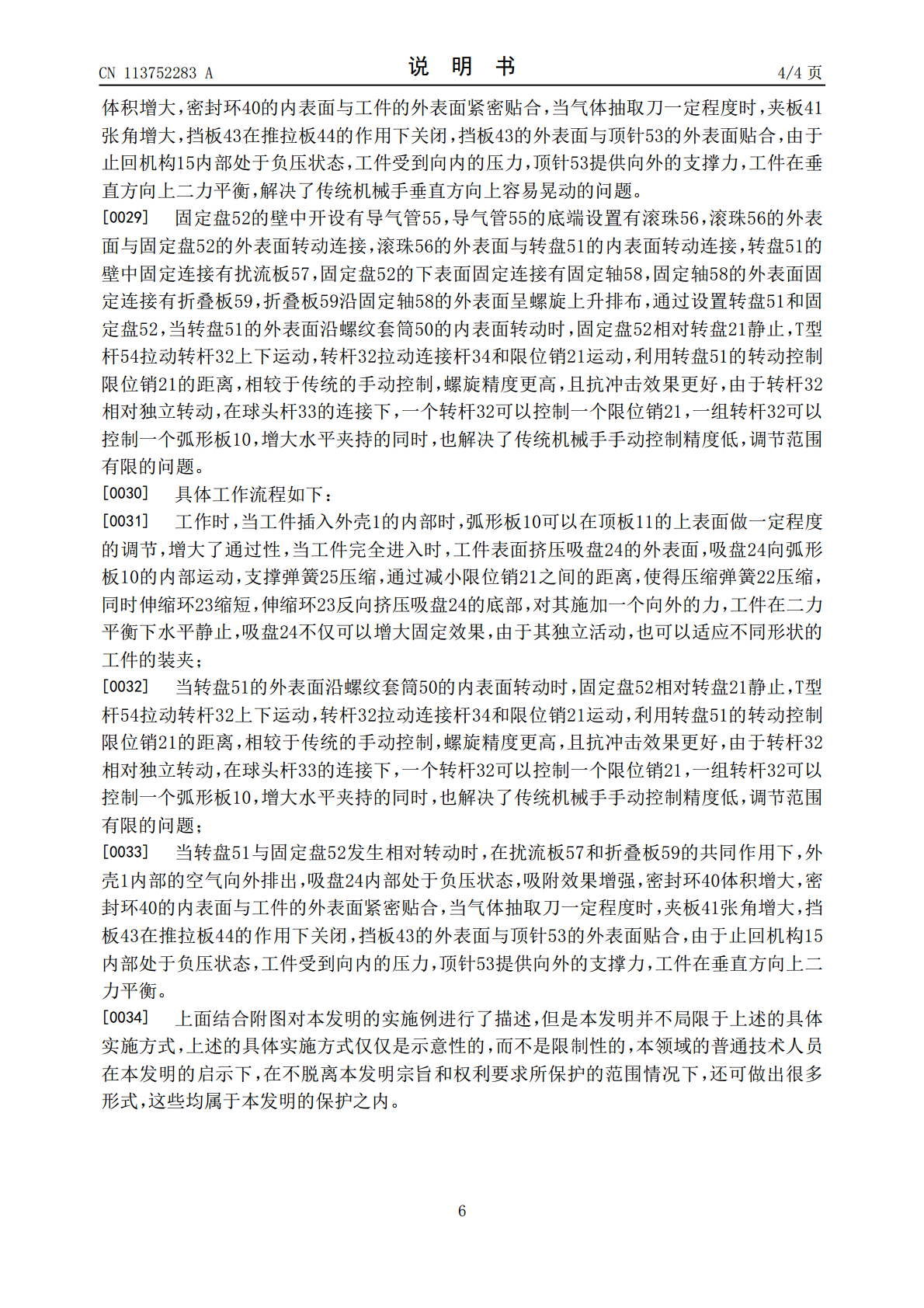
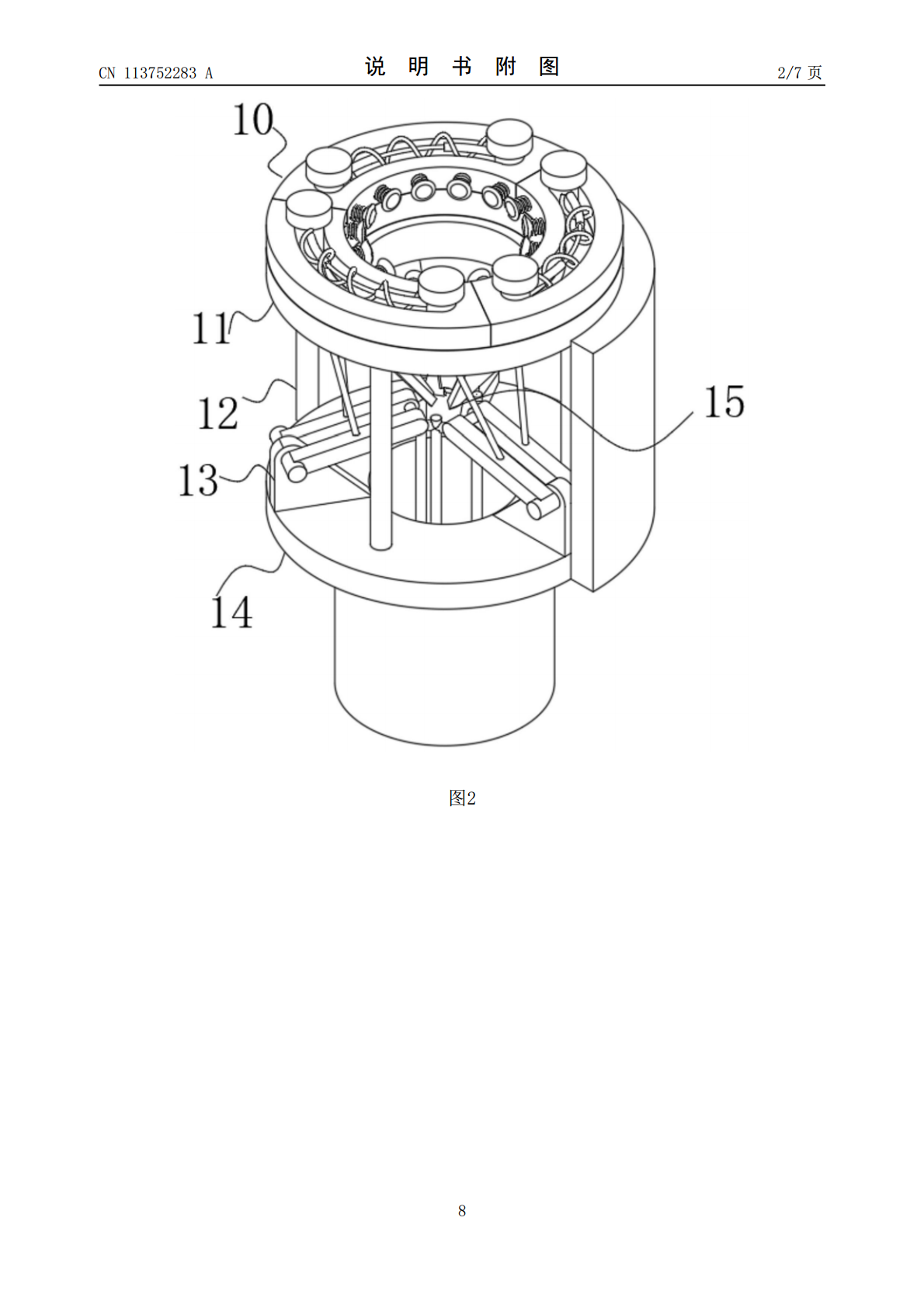
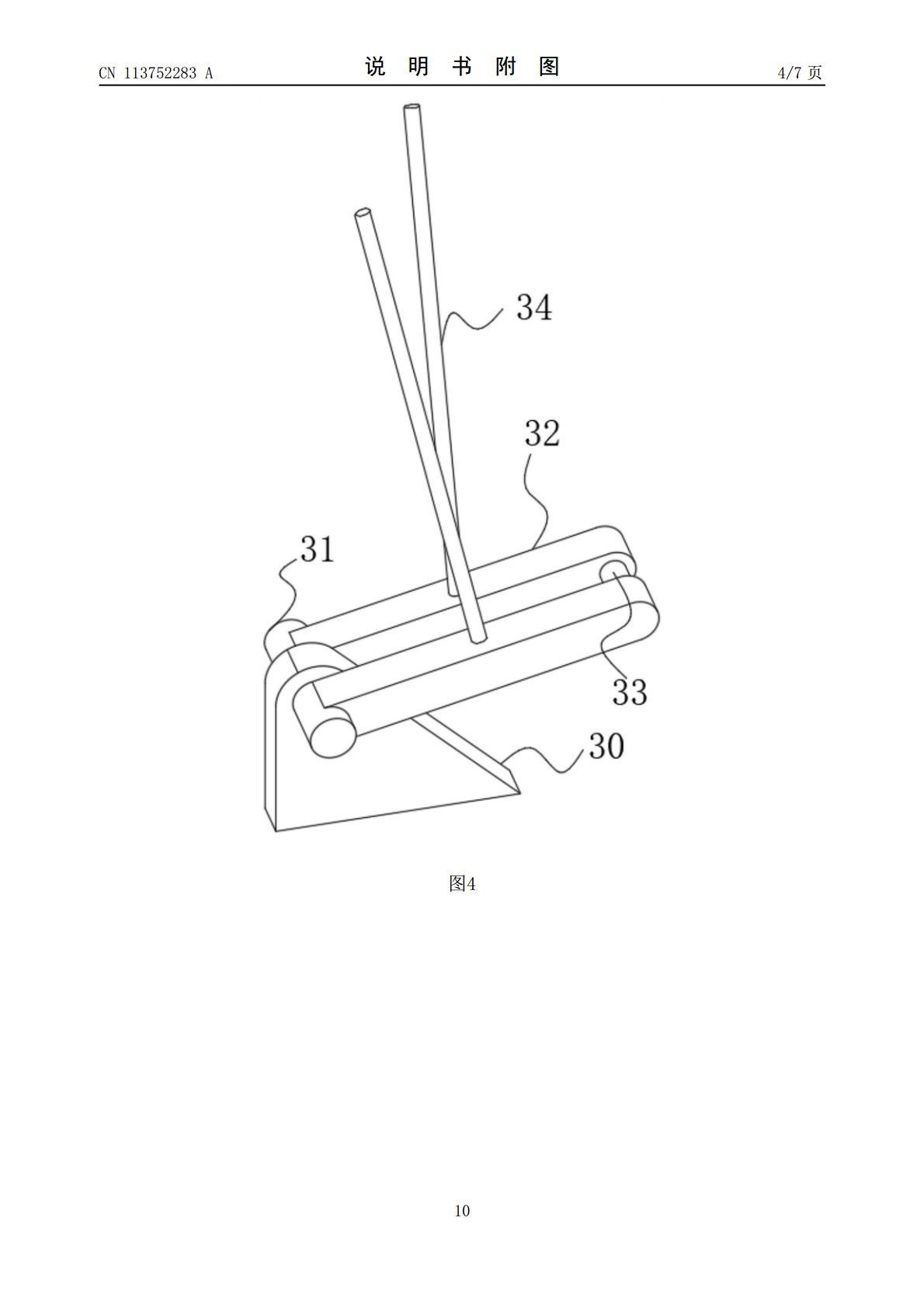
本发明属于注塑机械手领域,具体的说是一种智能机械手夹持组件,包括外壳;所述外壳的底部固定连接有密封筒,所述密封筒的顶部设置有夹持机构,所述夹持机构位于外壳的内部,所述夹持机构包括弧形板。该智能机械手夹持组件通过设置转盘和固定盘,当转盘的外表面沿螺纹套筒的内表面转动时,固定盘相对转盘静止,T型杆拉动转杆上下运动,转杆拉动连接杆和限位销运动,利用转盘的转动控制限位销的距离,相较于传统的手动控制,螺旋精度更高,且抗冲击效果更好,由于转杆相对独立转动,在球头杆的连接下,一个转杆可以控制一个限位销,一组转杆可以控制

一种夹持机械手.pdf
本实用新型公开了一种夹持机械手,包括:连接板;夹持驱动件,其连接于连接板;夹持钩,其沿水平方向间隔设置有至少两个,所有夹持钩包括限位件、第一夹持板和第二夹持板,第一夹持板和第二夹持板转动连接且转动轴线沿水平方向设置,限位件连接于第一夹持板和第二夹持板之间,所有第二夹持板位于连接板的下方,同一个夹持钩上的第一夹持板和第二夹持板形成夹持口,至少两个夹持口相互正对且相互朝向,夹持驱动件用于驱动至少两个第一夹持板,且使至少两个夹持口沿水平方向相互靠近或相互远离。使用前,通过限位件调节第一夹持板和第二夹持板之间形成
一种瓣膜夹持组件.pdf
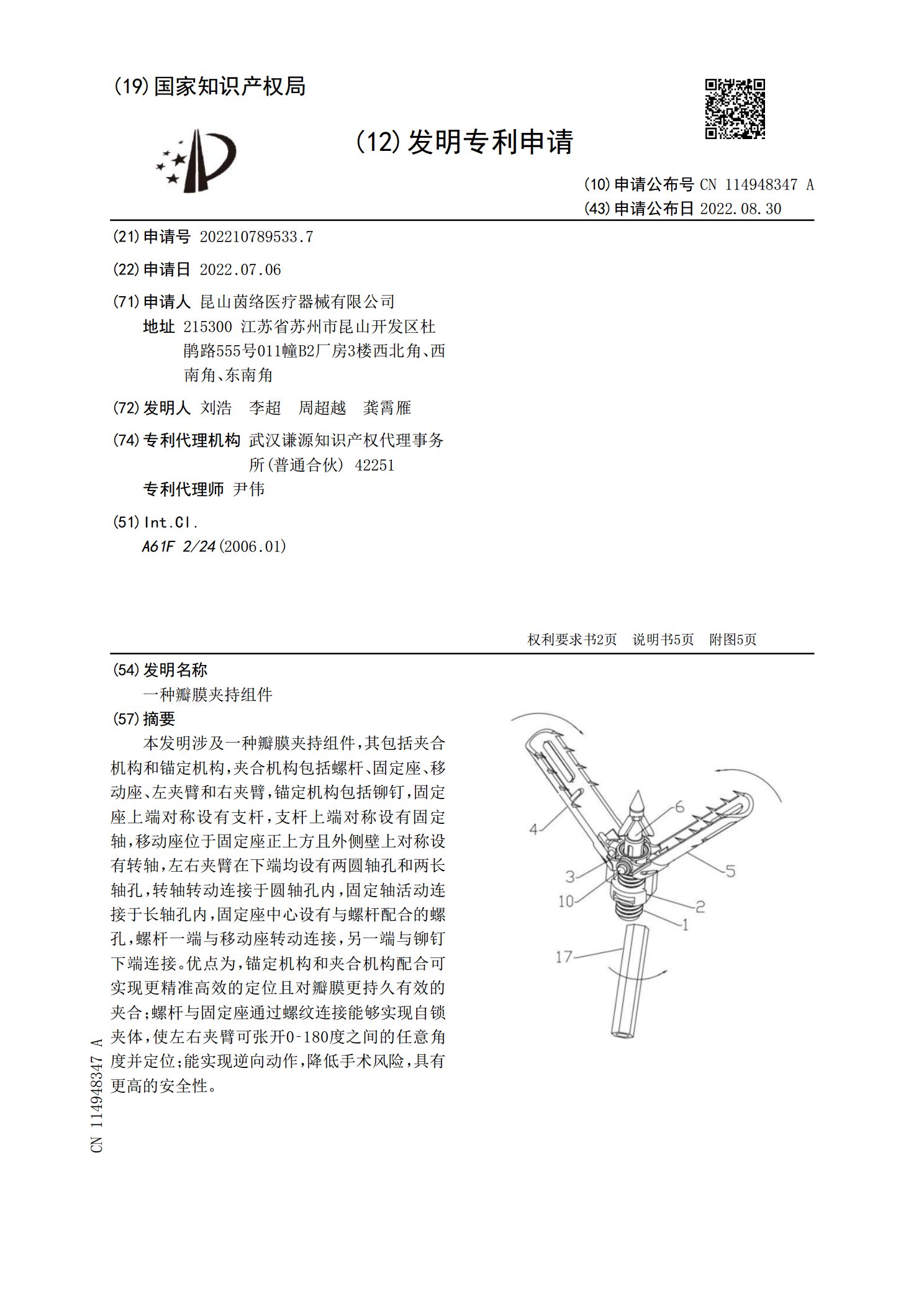
本发明涉及一种瓣膜夹持组件,其包括夹合机构和锚定机构,夹合机构包括螺杆、固定座、移动座、左夹臂和右夹臂,锚定机构包括铆钉,固定座上端对称设有支杆,支杆上端对称设有固定轴,移动座位于固定座正上方且外侧壁上对称设有转轴,左右夹臂在下端均设有两圆轴孔和两长轴孔,转轴转动连接于圆轴孔内,固定轴活动连接于长轴孔内,固定座中心设有与螺杆配合的螺孔,螺杆一端与移动座转动连接,另一端与铆钉下端连接。优点为,锚定机构和夹合机构配合可实现更精准高效的定位且对瓣膜更持久有效的夹合;螺杆与固定座通过螺纹连接能够实现自锁夹体,使左

一种夹持机械手机构.pdf
本发明公开了一种冷镦成型机的翻转夹持机械手机构,特别是一种冷镦成型机的可调式翻转夹持机械手机构,其结构中当活动套接有夹持机械手组件的翻转夹子座与夹持机械手架两者的间距进行调节时,采用上述夹持机械手组件与夹持机械手架两者之间的齿轮副随着联动的技术方案。其解决了避免夹持机械手组件与夹持机械手架两者之间的齿轮副的传动精准度受到两者之间间距调整影响的技术问题,提高了冷镦成型机的加工精度稳定性以及加工效率。
一种气动夹持机械手.pdf
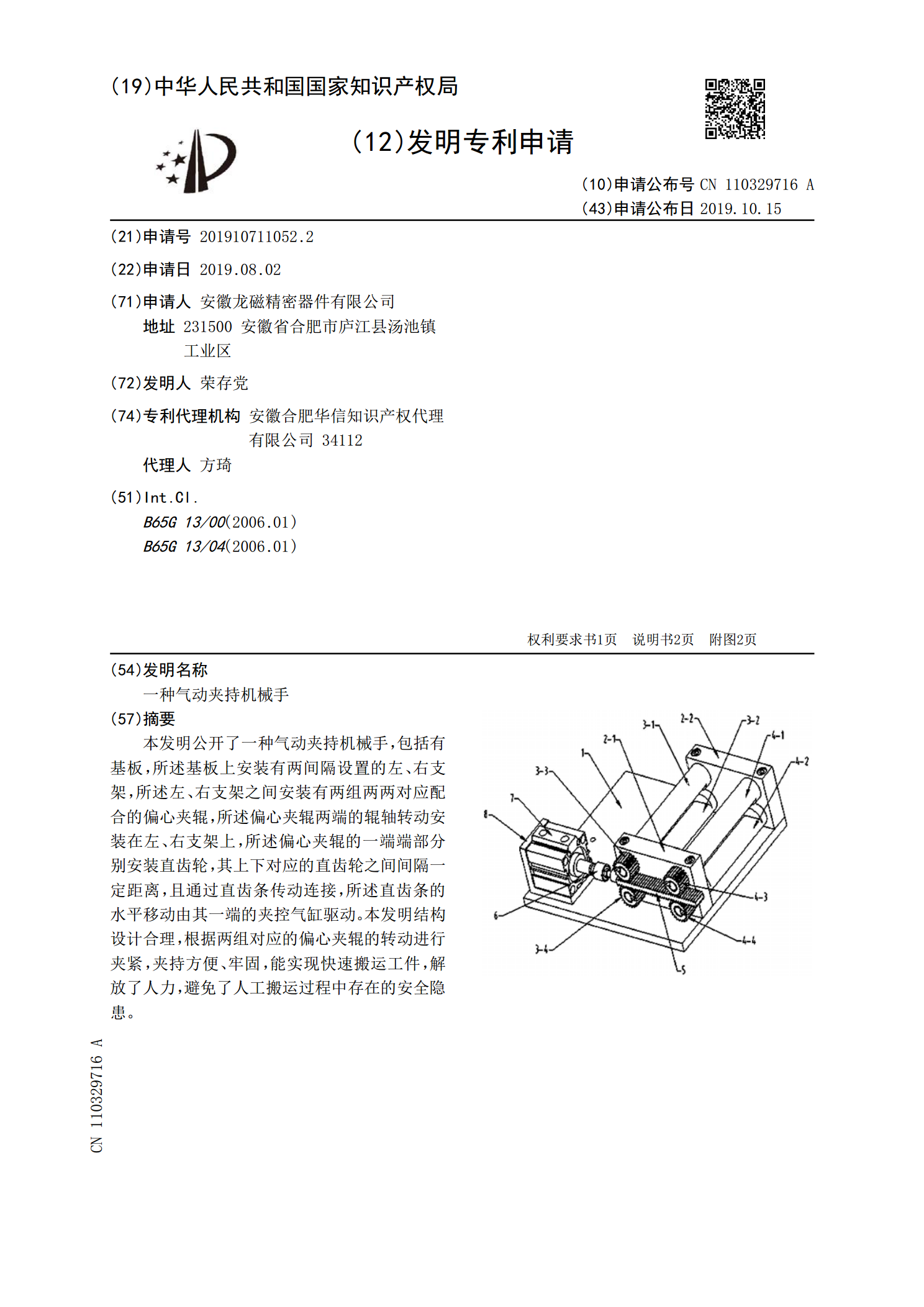
本发明公开了一种气动夹持机械手,包括有基板,所述基板上安装有两间隔设置的左、右支架,所述左、右支架之间安装有两组两两对应配合的偏心夹辊,所述偏心夹辊两端的辊轴转动安装在左、右支架上,所述偏心夹辊的一端端部分别安装直齿轮,其上下对应的直齿轮之间间隔一定距离,且通过直齿条传动连接,所述直齿条的水平移动由其一端的夹控气缸驱动。本发明结构设计合理,根据两组对应的偏心夹辊的转动进行夹紧,夹持方便、牢固,能实现快速搬运工件,解放了人力,避免了人工搬运过程中存在的安全隐患。