
一种可伸缩半自动拉拔钢筋受力机构.pdf

努力****向丝

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可伸缩半自动拉拔钢筋受力机构.pdf
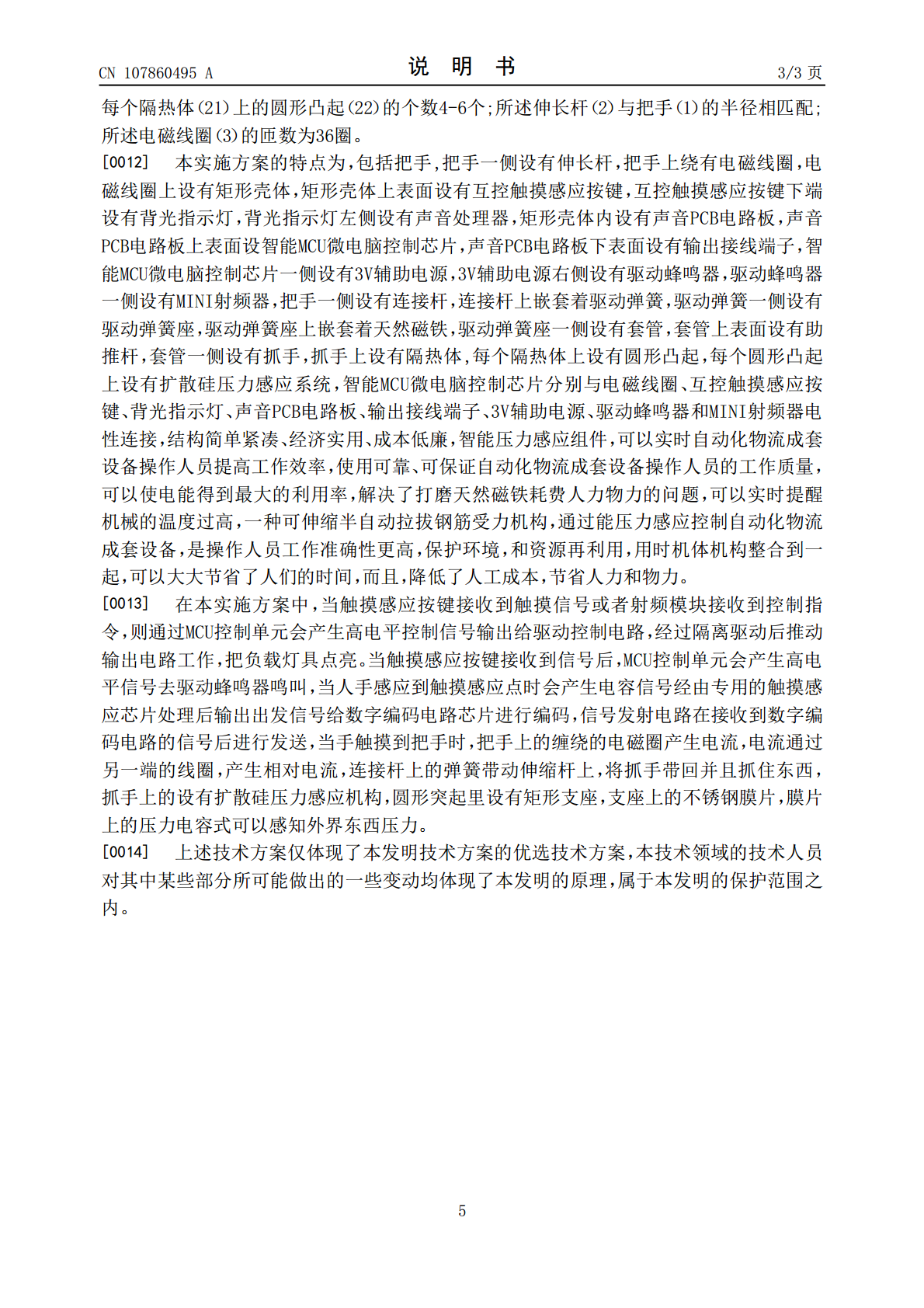
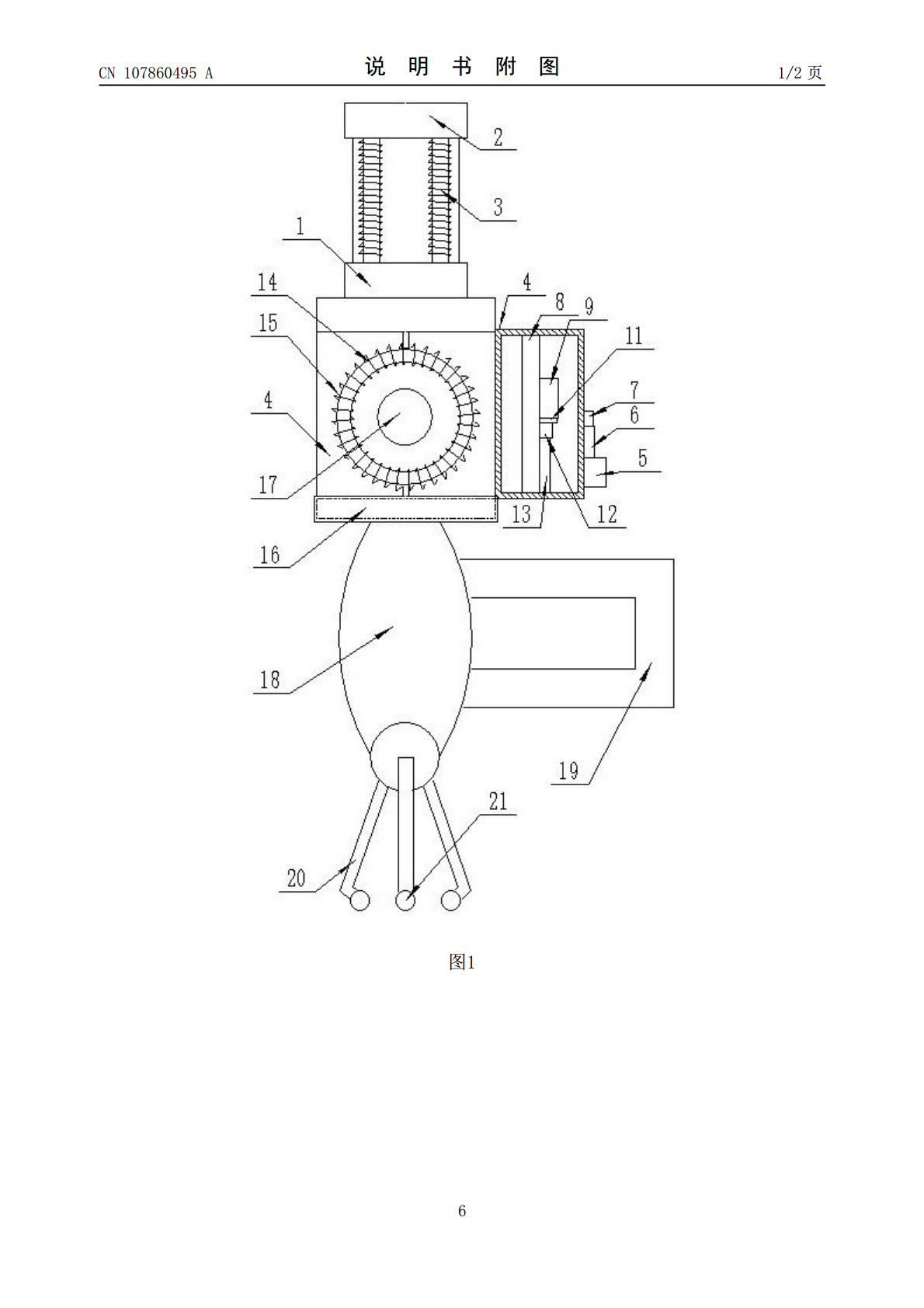
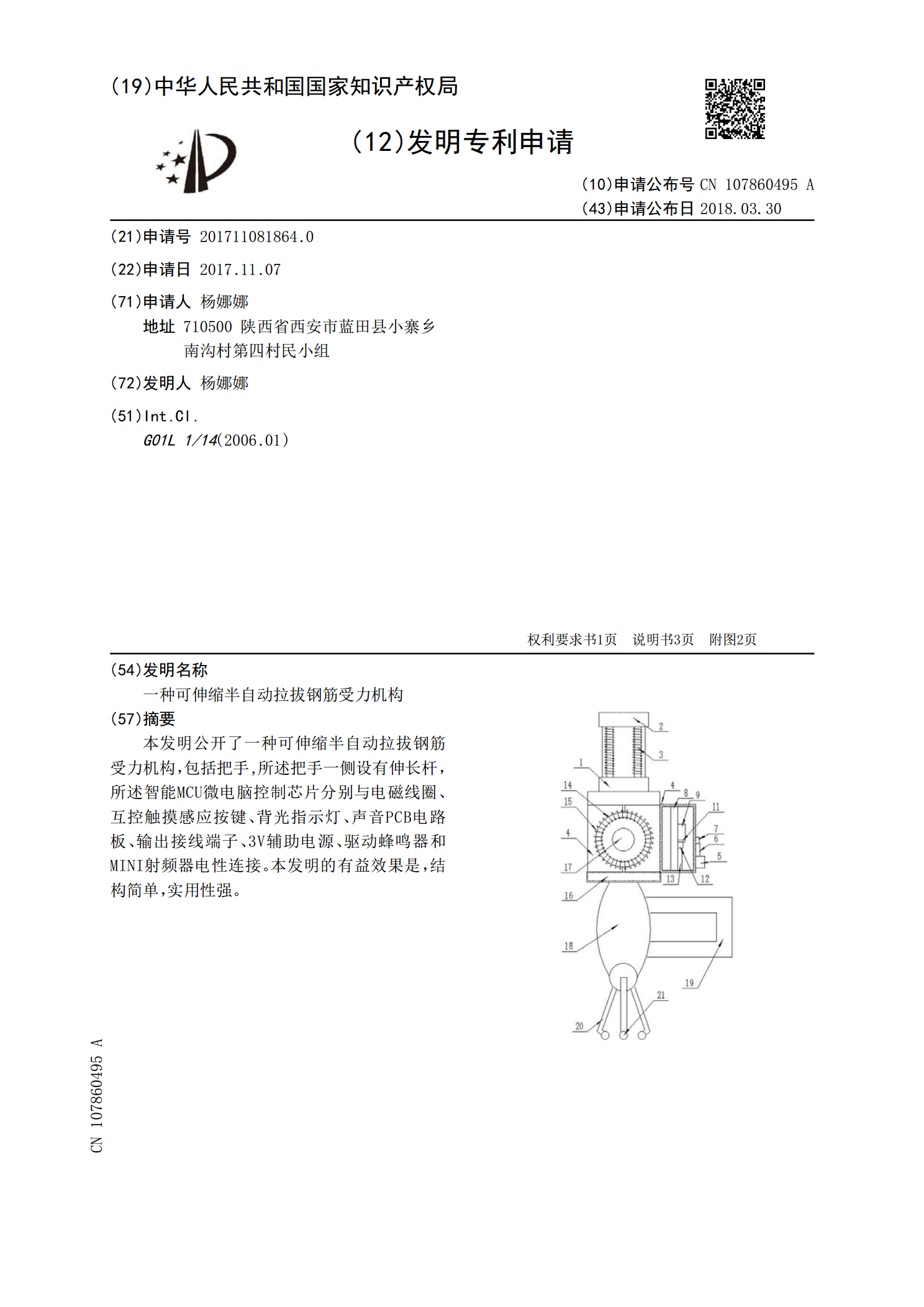
本发明公开了一种可伸缩半自动拉拔钢筋受力机构,包括把手,所述把手一侧设有伸长杆,所述智能MCU微电脑控制芯片分别与电磁线圈、互控触摸感应按键、背光指示灯、声音PCB电路板、输出接线端子、3V辅助电源、驱动蜂鸣器和MINI射频器电性连接。本发明的有益效果是,结构简单,实用性强。
一种可推拉钢筋拉拔受力机构.pdf
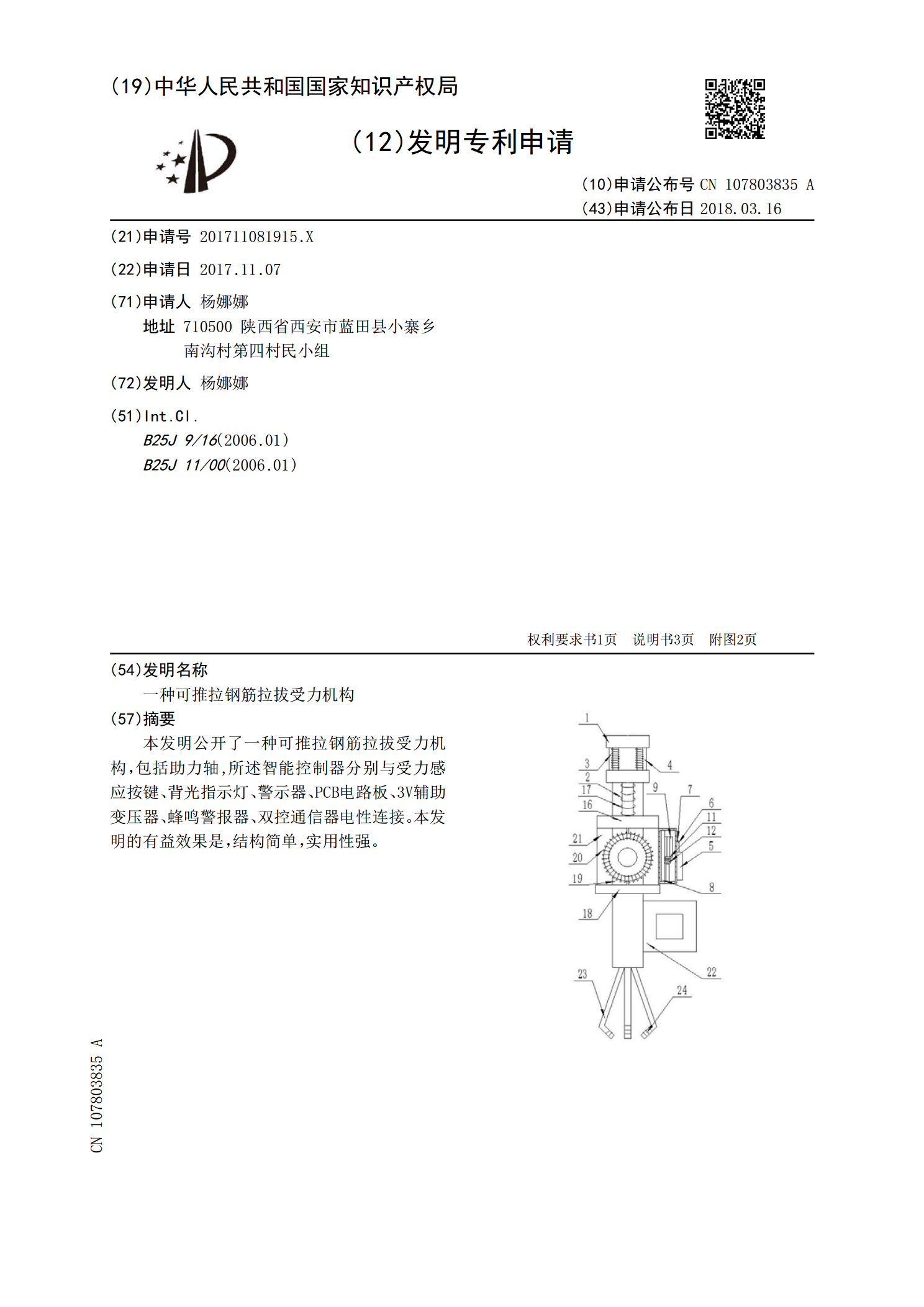
本发明公开了一种可推拉钢筋拉拔受力机构,包括助力轴,所述智能控制器分别与受力感应按键、背光指示灯、警示器、PCB电路板、3V辅助变压器、蜂鸣警报器、双控通信器电性连接。本发明的有益效果是,结构简单,实用性强。
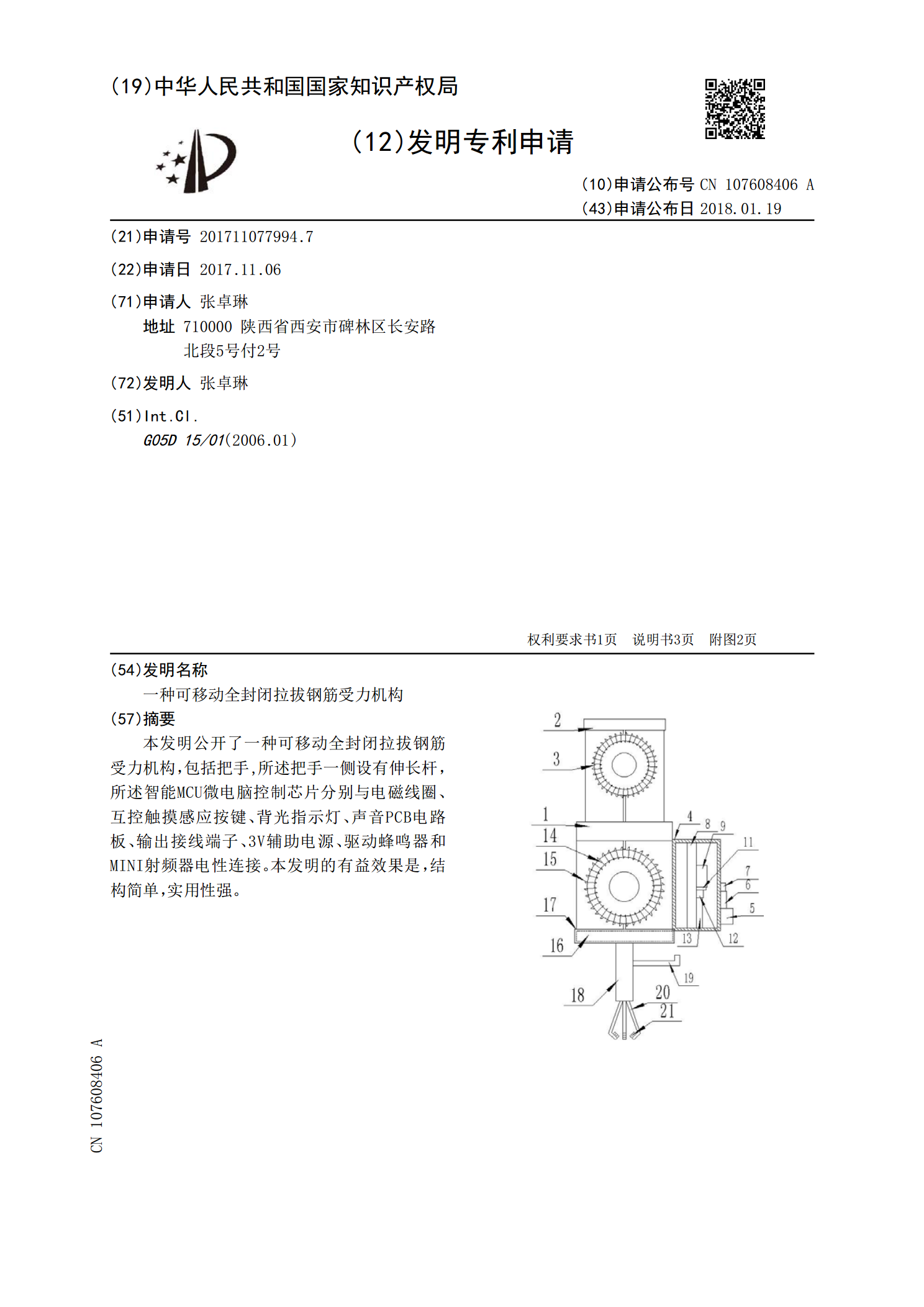
一种可移动全封闭拉拔钢筋受力机构.pdf
本发明公开了一种可移动全封闭拉拔钢筋受力机构,包括把手,所述把手一侧设有伸长杆,所述智能MCU微电脑控制芯片分别与电磁线圈、互控触摸感应按键、背光指示灯、声音PCB电路板、输出接线端子、3V辅助电源、驱动蜂鸣器和MINI射频器电性连接。本发明的有益效果是,结构简单,实用性强。
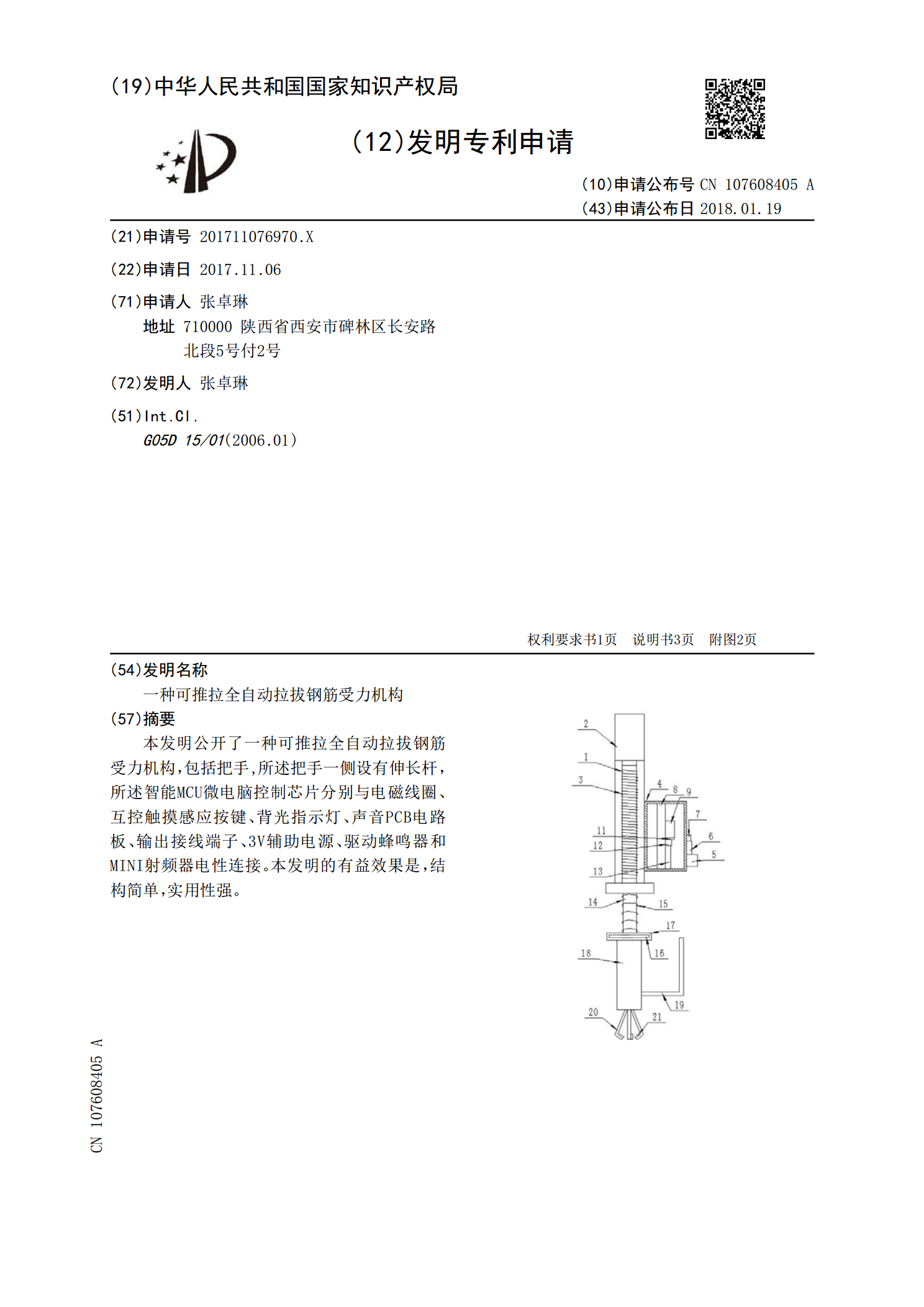
一种可推拉全自动拉拔钢筋受力机构.pdf
本发明公开了一种可推拉全自动拉拔钢筋受力机构,包括把手,所述把手一侧设有伸长杆,所述智能MCU微电脑控制芯片分别与电磁线圈、互控触摸感应按键、背光指示灯、声音PCB电路板、输出接线端子、3V辅助电源、驱动蜂鸣器和MINI射频器电性连接。本发明的有益效果是,结构简单,实用性强。
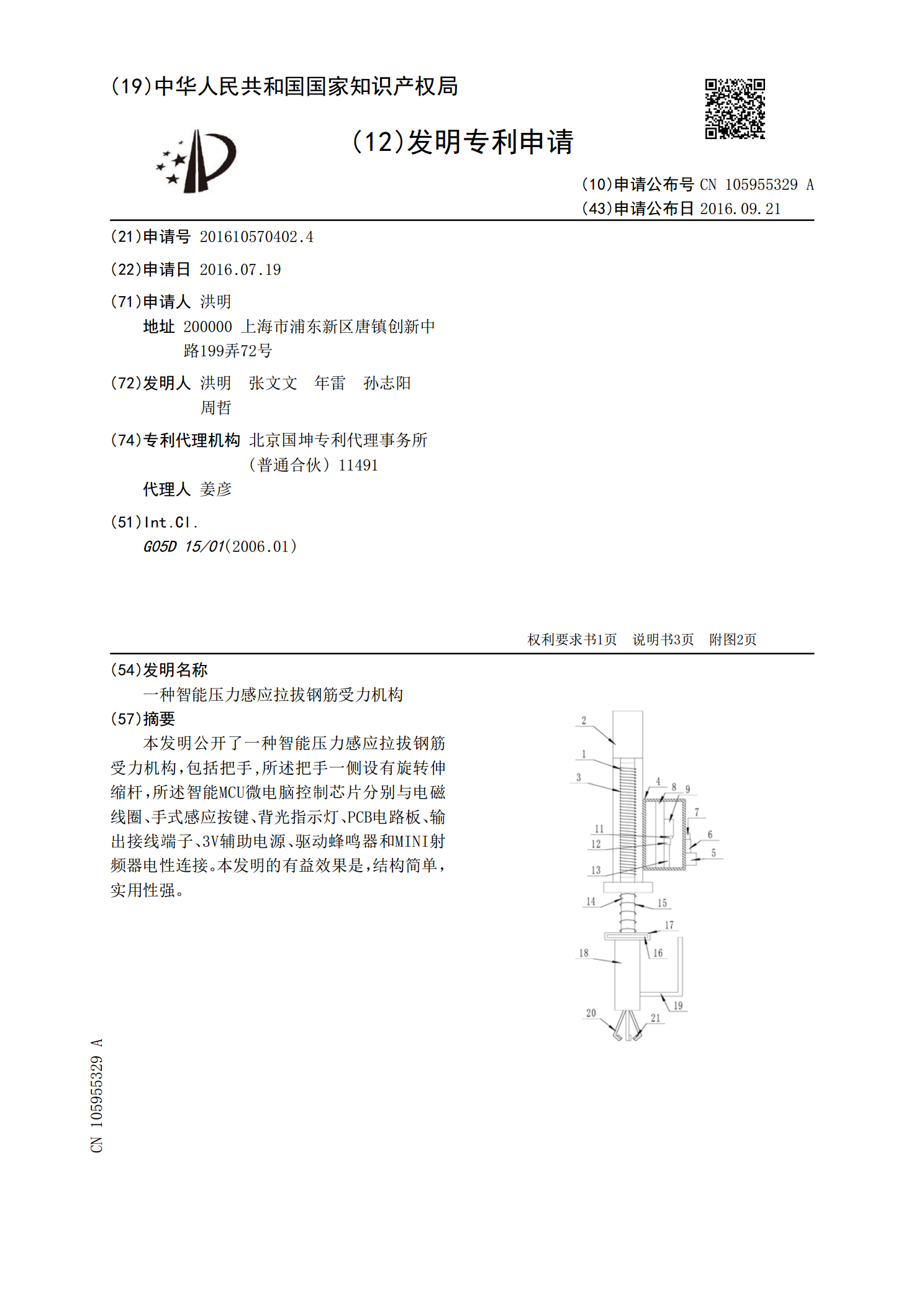
一种智能压力感应拉拔钢筋受力机构.pdf
本发明公开了一种智能压力感应拉拔钢筋受力机构,包括把手,所述把手一侧设有旋转伸缩杆,所述智能MCU微电脑控制芯片分别与电磁线圈、手式感应按键、背光指示灯、PCB电路板、输出接线端子、3V辅助电源、驱动蜂鸣器和MINI射频器电性连接。本发明的有益效果是,结构简单,实用性强。