
一种行星齿轮箱故障诊断方法.pdf

一条****然后

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种行星齿轮箱故障诊断方法.pdf
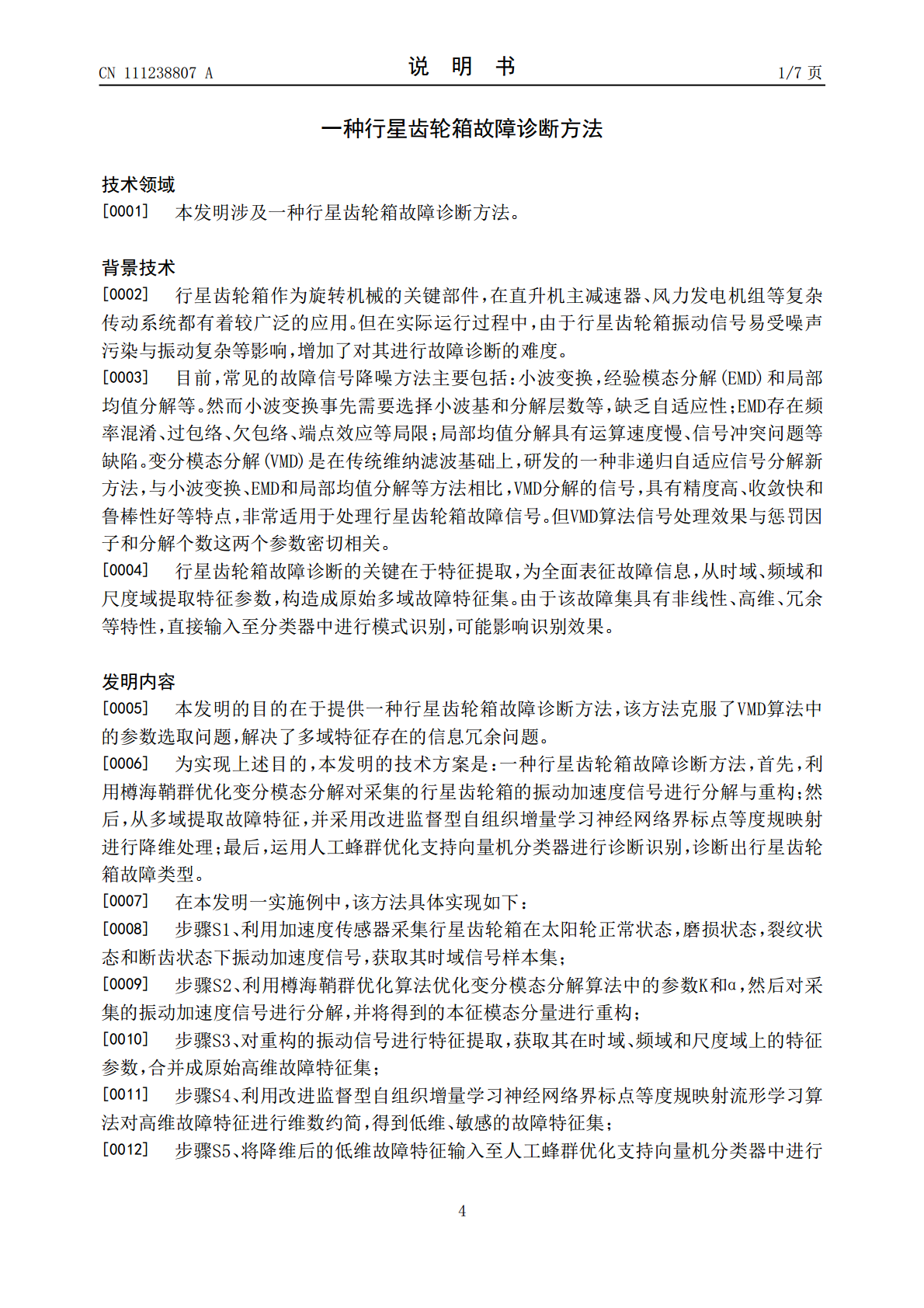
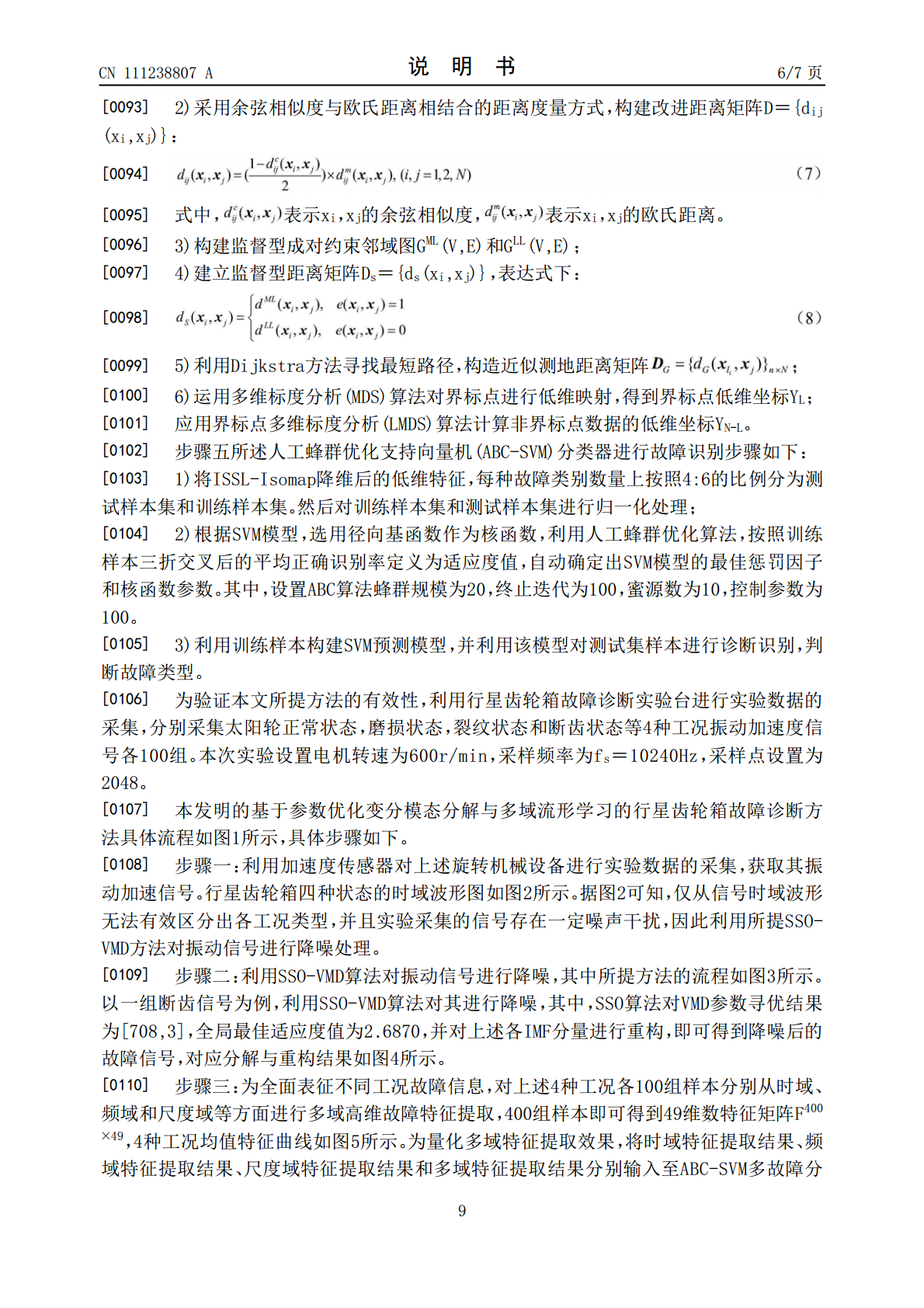
本发明涉及一种行星齿轮箱故障诊断方法。首先,利用樽海鞘群优化变分模态分解(SSO‑VMD)对信号进行分解与重构。然后,从多域提取故障特征,并采用改进监督型自组织增量学习神经网络界标点等度规映射(ISSL‑Isomap)进行降维处理。最后,运用人工蜂群优化支持向量机(ABC‑SVM)分类器进行诊断识别。本发明克服了VMD算法中的参数选取问题,解决了多域特征存在的信息冗余问题。行星齿轮箱故障诊断实验结果表明所提方法能够有效识别出各故障类型,具有很大的实用价值。
一种行星齿轮箱的故障诊断方法和装置.pdf
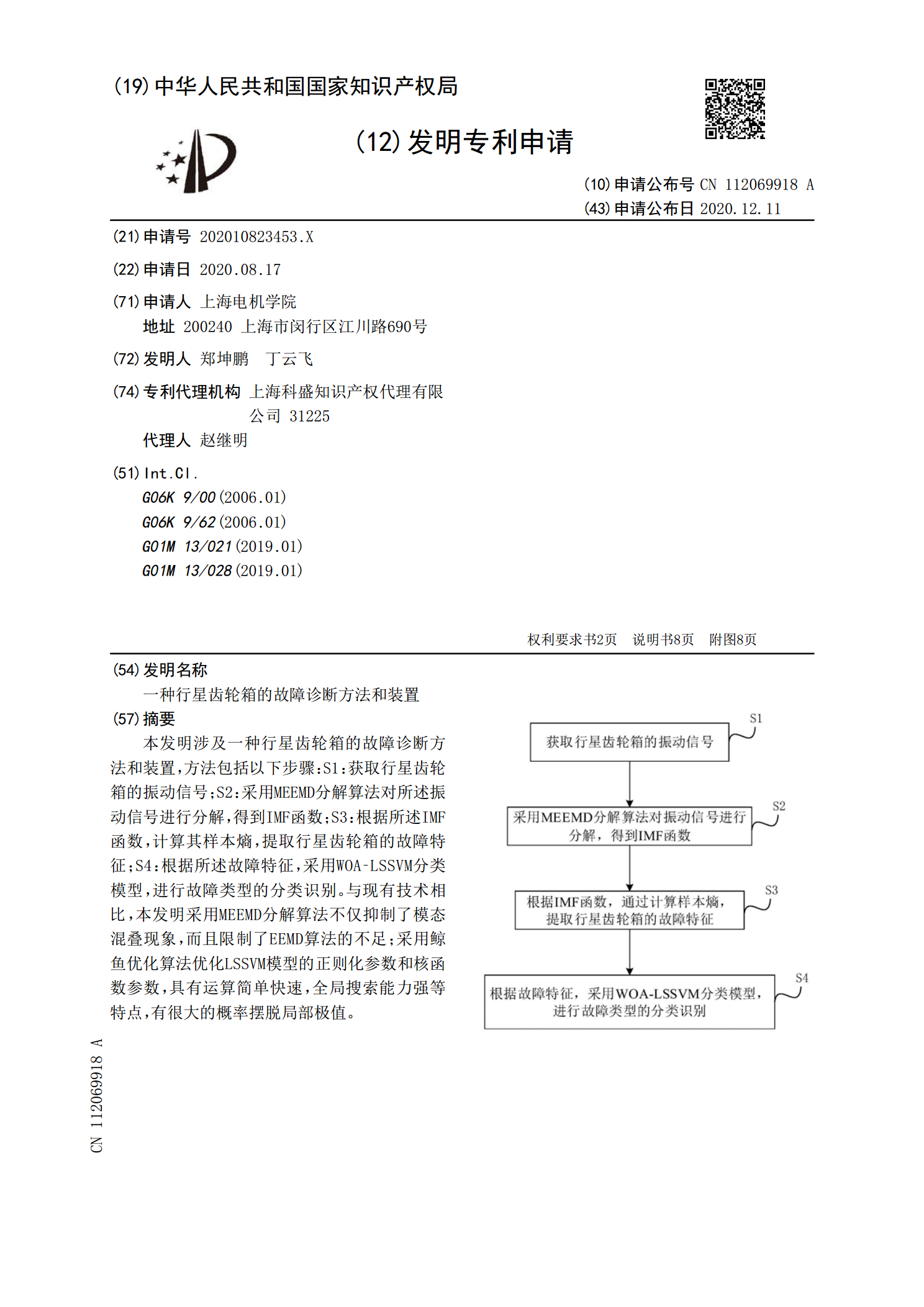
本发明涉及一种行星齿轮箱的故障诊断方法和装置,方法包括以下步骤:S1:获取行星齿轮箱的振动信号;S2:采用MEEMD分解算法对所述振动信号进行分解,得到IMF函数;S3:根据所述IMF函数,计算其样本熵,提取行星齿轮箱的故障特征;S4:根据所述故障特征,采用WOA‑LSSVM分类模型,进行故障类型的分类识别。与现有技术相比,本发明采用MEEMD分解算法不仅抑制了模态混叠现象,而且限制了EEMD算法的不足;采用鲸鱼优化算法优化LSSVM模型的正则化参数和核函数参数,具有运算简单快速,全局搜索能力强等特点,有
一种风电机组行星齿轮箱故障诊断方法.pdf
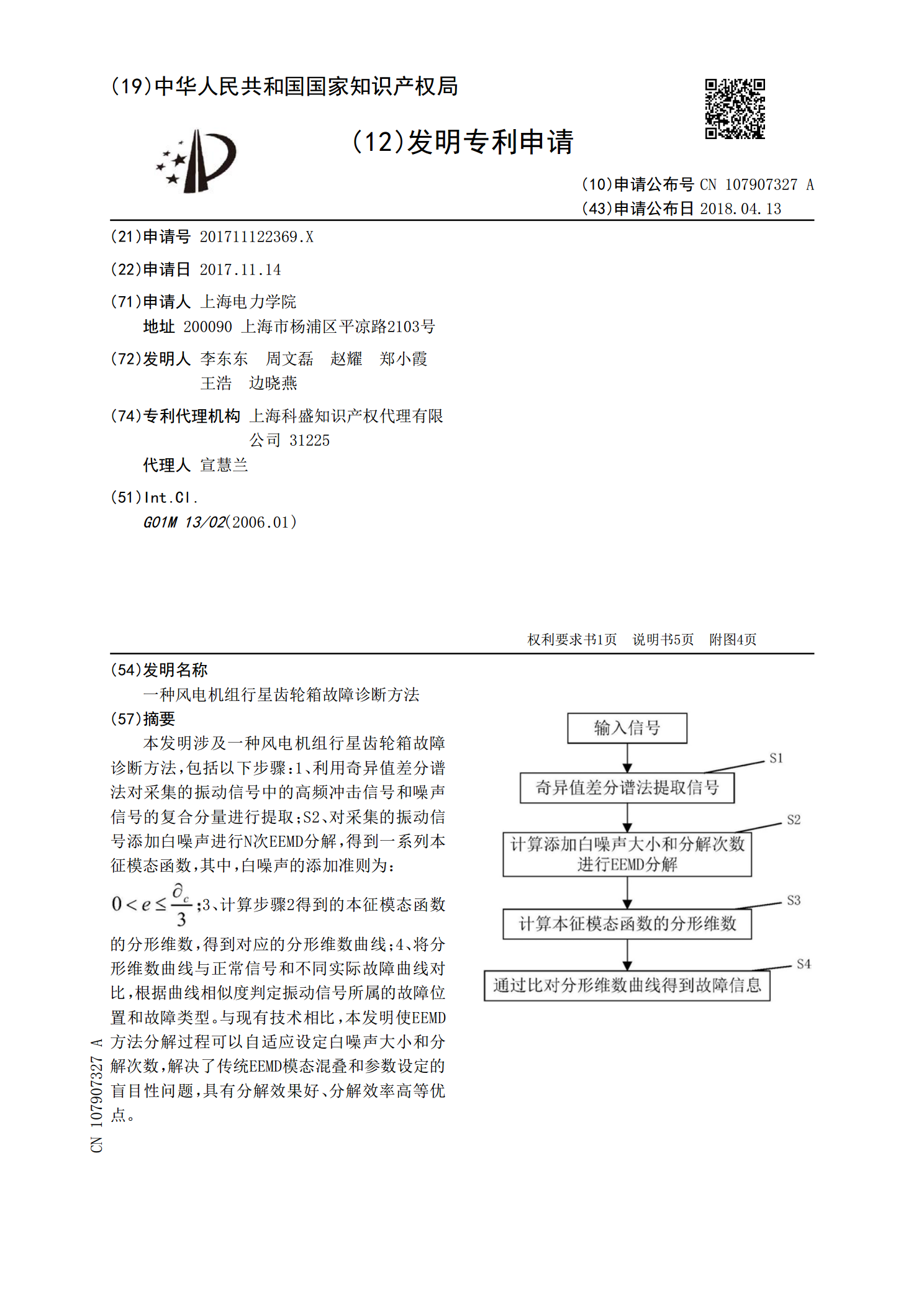
本发明涉及一种风电机组行星齿轮箱故障诊断方法,包括以下步骤:1、利用奇异值差分谱法对采集的振动信号中的高频冲击信号和噪声信号的复合分量进行提取;S2、对采集的振动信号添加白噪声进行N次EEMD分解,得到一系列本征模态函数,其中,白噪声的添加准则为:

一种基于流向图的行星齿轮箱故障诊断方法.pdf
本发明提供了一种基于流向图的行星齿轮箱故障诊断方法。本发明的目的是为了解决行星齿轮箱诊断过程晦涩和诊断结果准确率低的问题。一:从典型行星齿轮箱振动信号中提取故障诊断特征,形成行星齿轮箱的故障诊断训练实例。二:通过流向图构建算法构建行星齿轮箱故障诊断流向图;三:利用流向图约简算法去掉冗余或不相关的征兆属性节点,获得最简行星齿轮箱故障诊断流向图;四:从待诊故障行星齿轮箱振动信号中提取故障诊断特征,形成行星齿轮箱的故障诊断待诊实例;五:采用流向图分类决策算法确定待诊行星齿轮箱的故障类型。结果表明本发明能够直观地
一种基于强化胶囊网络的行星齿轮箱故障诊断方法.pdf
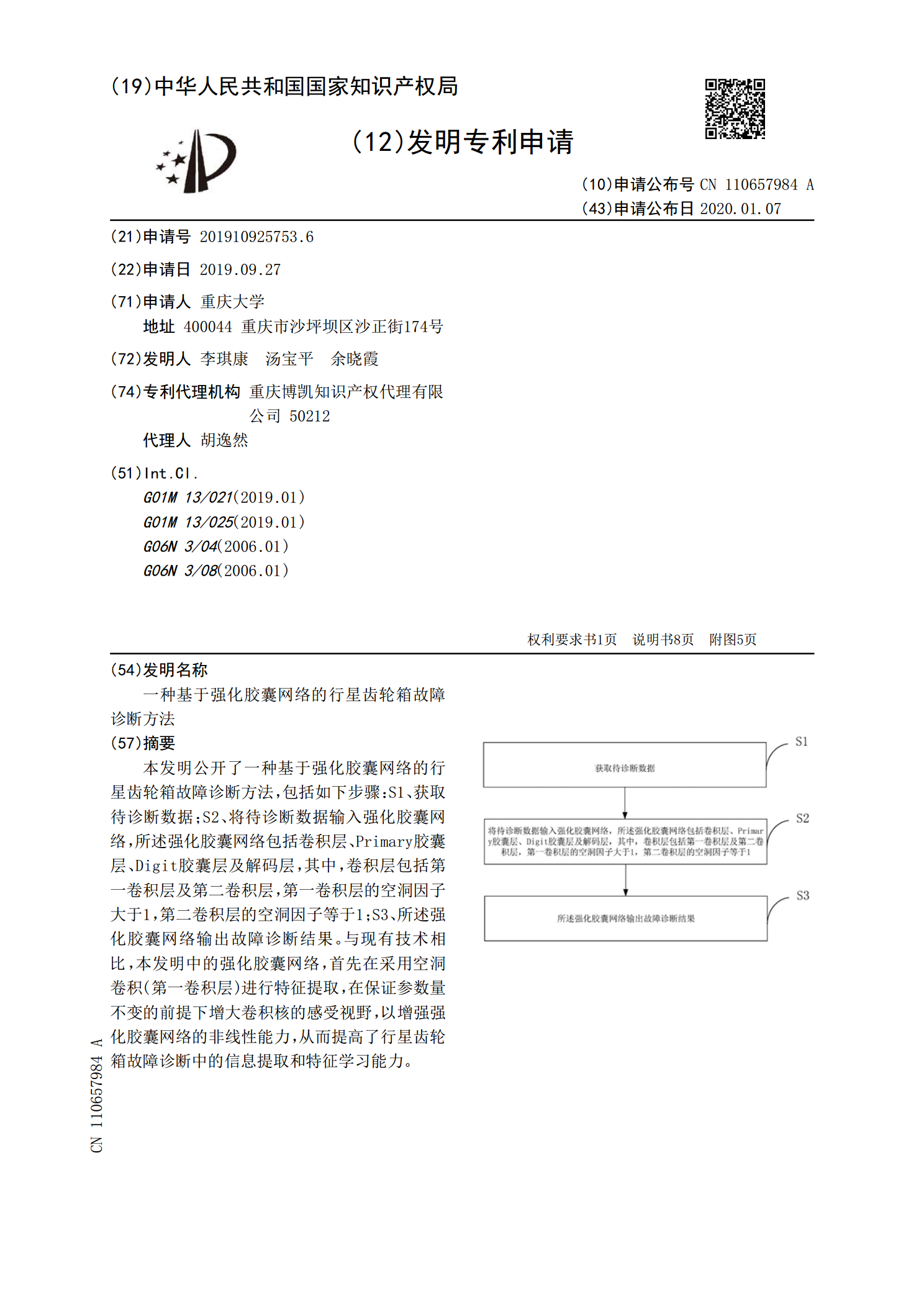
本发明公开了一种基于强化胶囊网络的行星齿轮箱故障诊断方法,包括如下步骤:S1、获取待诊断数据;S2、将待诊断数据输入强化胶囊网络,所述强化胶囊网络包括卷积层、Primary胶囊层、Digit胶囊层及解码层,其中,卷积层包括第一卷积层及第二卷积层,第一卷积层的空洞因子大于1,第二卷积层的空洞因子等于1;S3、所述强化胶囊网络输出故障诊断结果。与现有技术相比,本发明中的强化胶囊网络,首先在采用空洞卷积(第一卷积层)进行特征提取,在保证参数量不变的前提下增大卷积核的感受视野,以增强强化胶囊网络的非线性能力,从而