
蜂窝网络中的载波相位定位.pdf

邻家****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
蜂窝网络中的载波相位定位.pdf
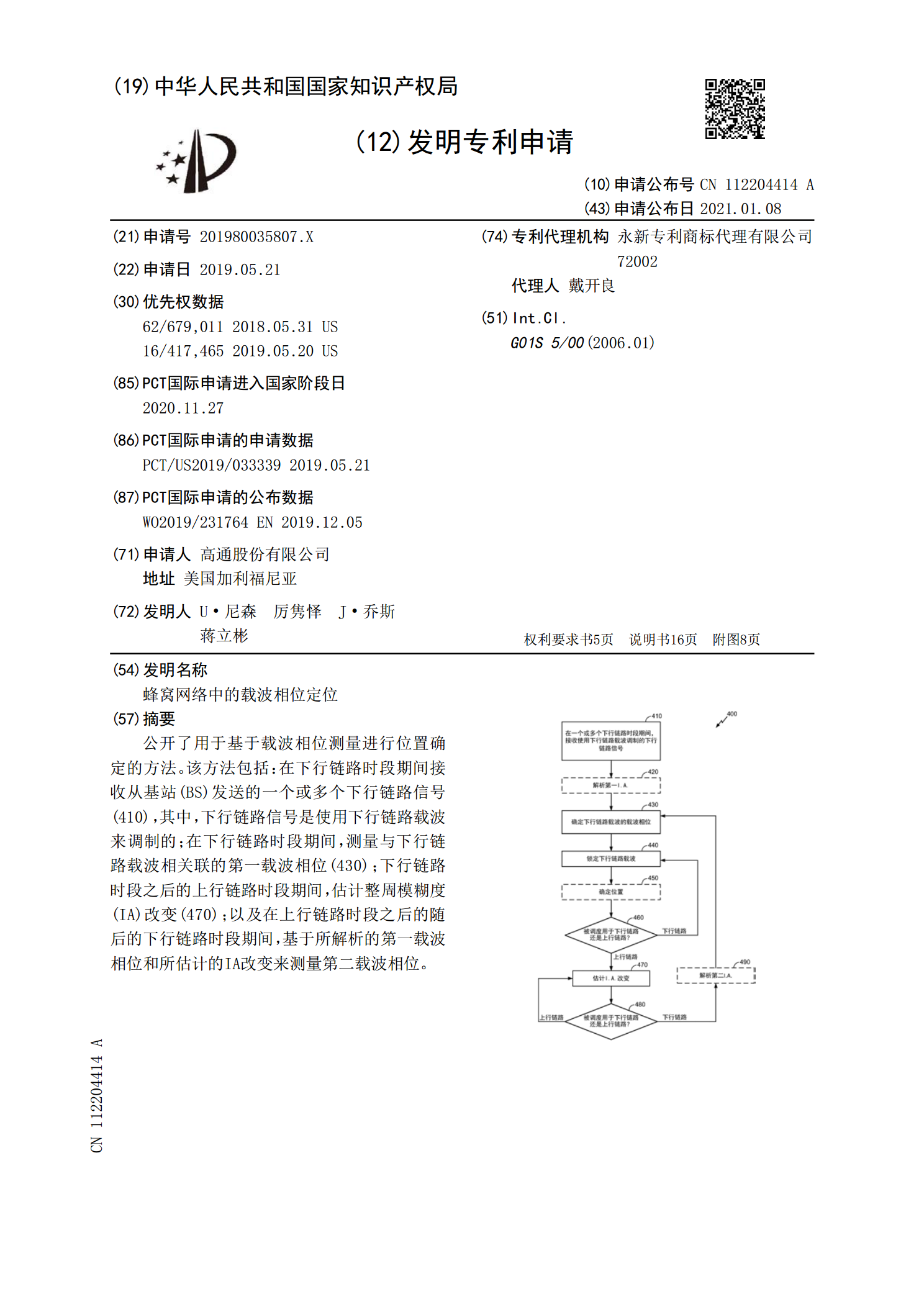
公开了用于基于载波相位测量进行位置确定的方法。该方法包括:在下行链路时段期间接收从基站(BS)发送的一个或多个下行链路信号(410),其中,下行链路信号是使用下行链路载波来调制的;在下行链路时段期间,测量与下行链路载波相关联的第一载波相位(430);下行链路时段之后的上行链路时段期间,估计整周模糊度(IA)改变(470);以及在上行链路时段之后的随后的下行链路时段期间,基于所解析的第一载波相位和所估计的IA改变来测量第二载波相位。

定位的数学模型-3载波相位相对定位.pdf
GPS载波相位相对定位的数学模型同济大学测量系陈义沈云中同济大学陈义、沈云中提要相对定位的数学模型同济大学陈义、沈云中相对定位的数学模型2.1载波相位基本观测方程为简明起见,省略电离层和对流层改正,则两点上的相位方程为:ii1iiF1k(t)+f1d(t)=rk(t)+N1k+f1dk(t)l1ii1iiF1l(t)+f1d(t)=rl(t)+N1l+f1dl(t)l1ii1iiF2k(t)+f2d(t)=rk(t)+N2k+f2dk(t)l2ii1iiF2l(t)+f2d(t)=rl(t)+N2l+f2
一种载波相位定位的方法及其装置.pdf
本公开实施例公开了一种载波相位定位的方法及其装置,可应用于通信技术领域,其中,由终端设备执行的方法包括:接收核心网设备发送的用于指示每个参考信号的相位误差组信息的相位误差辅助信息,之后,终端设备可以根据参考信号的发射接收点侧的相位误差信息,确定发射接收点在调制该参考信号时产生的相位误差,并根据该相位误差,及该参考信号的测量结果,确定终端位置,从而提高了定位的准确性。
蜂窝无线电网络中的载波带宽调整.pdf
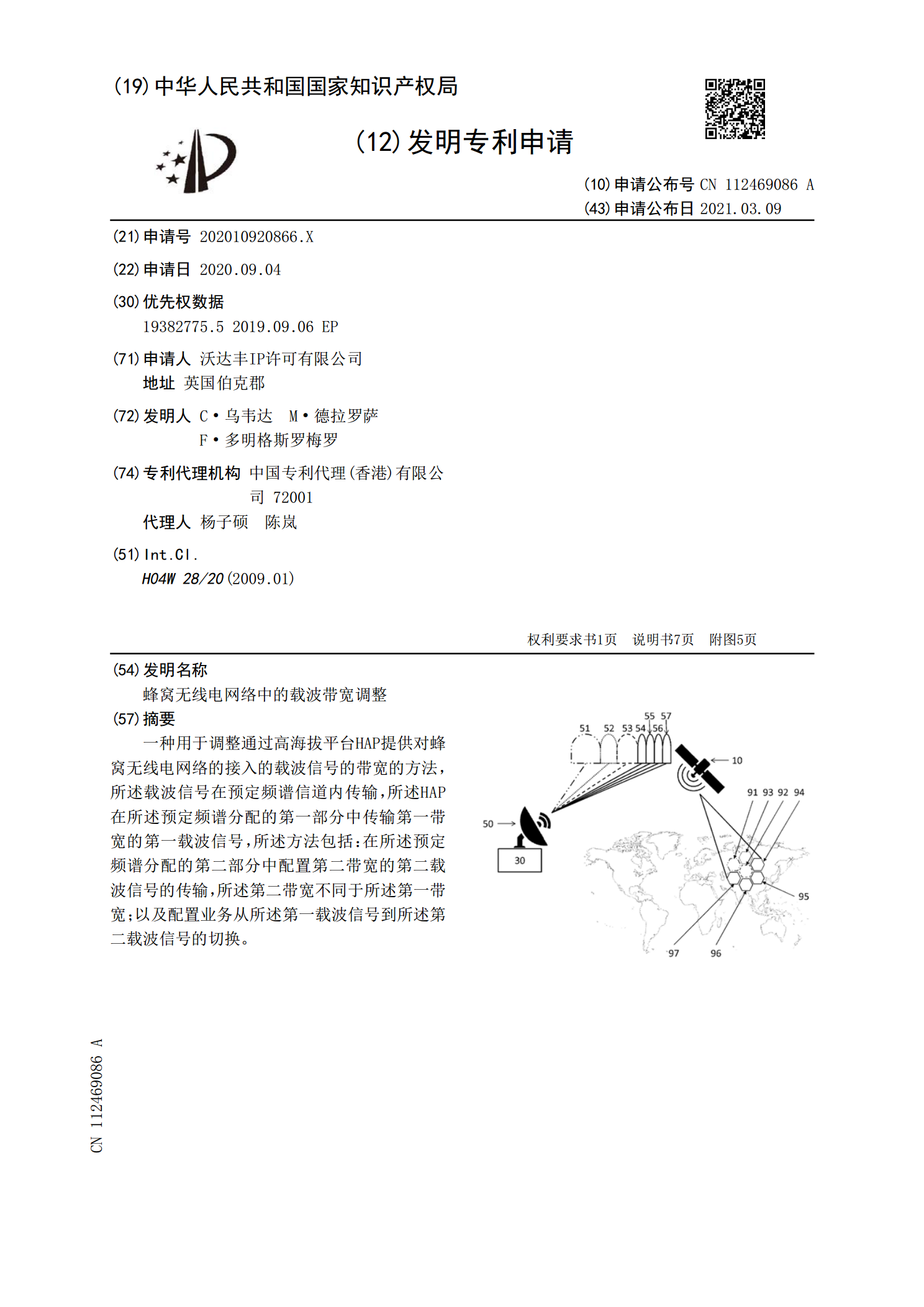
一种用于调整通过高海拔平台HAP提供对蜂窝无线电网络的接入的载波信号的带宽的方法,所述载波信号在预定频谱信道内传输,所述HAP在所述预定频谱分配的第一部分中传输第一带宽的第一载波信号,所述方法包括:在所述预定频谱分配的第二部分中配置第二带宽的第二载波信号的传输,所述第二带宽不同于所述第一带宽;以及配置业务从所述第一载波信号到所述第二载波信号的切换。

GPS载波相位定位算法研究与仿真的综述报告.docx
GPS载波相位定位算法研究与仿真的综述报告GPS(GlobalPositioningSystem)是目前最为广泛应用的卫星导航系统,具有高精度、全球覆盖等优点,因此成为众多领域中不可或缺的一部分。GPS定位核心技术之一便是相位定位算法,其基于GPS卫星发射的载波相位信息来计算接收机与卫星之间的距离,进而推算出接收机的位置。与传统的伪距定位不同,GPS载波相位定位算法具有更高的精度和稳定性。但同时也面临复杂的计算和数据处理问题,需要科学家们对其进行深入研究和优化。本文就GPS载波相位定位算法的研究和仿真进行