
基于人工蜂群-自适应遗传算法的仓储机器人路径规划方法.pdf

康平****ng

1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于人工蜂群-自适应遗传算法的仓储机器人路径规划方法.pdf
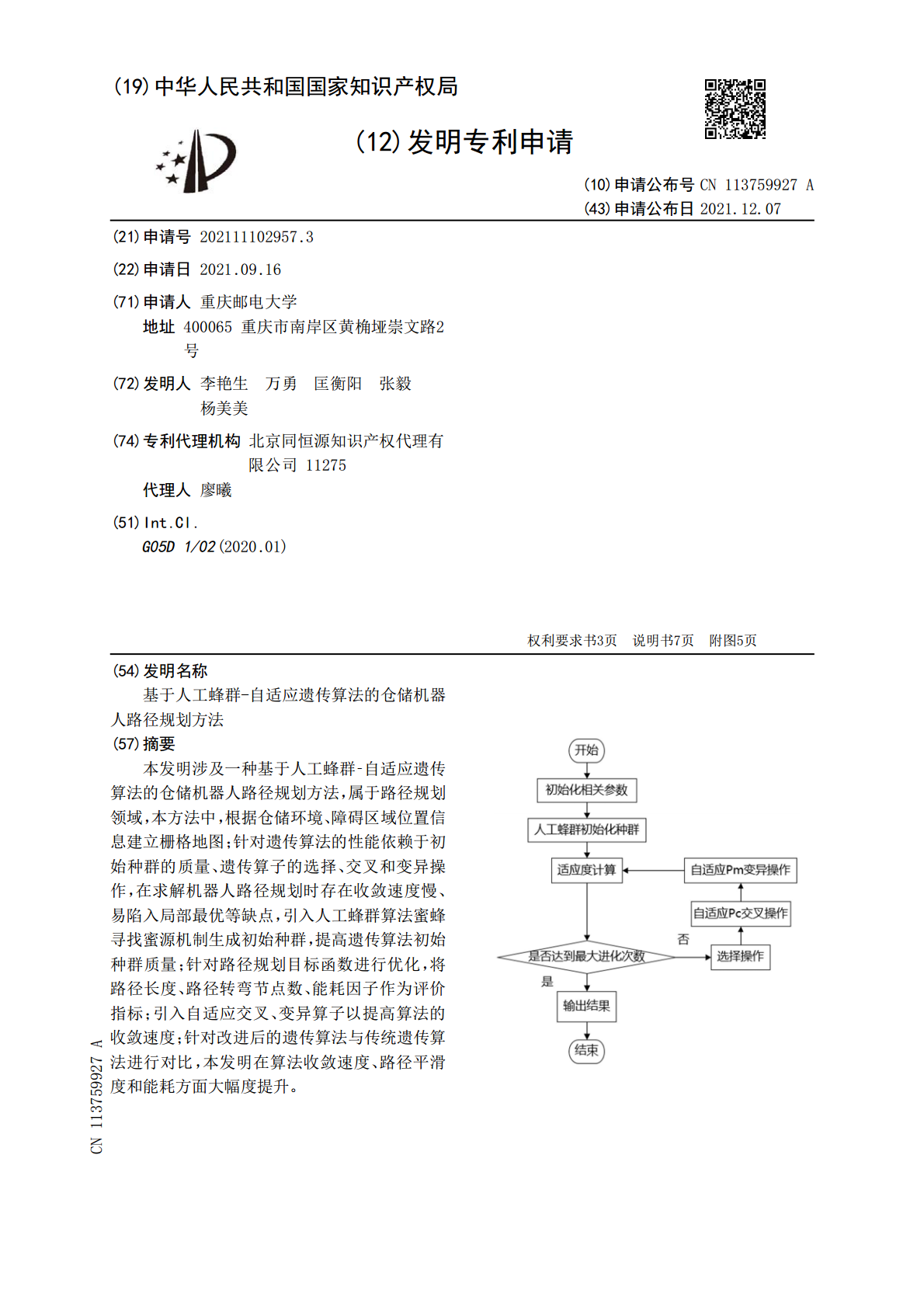
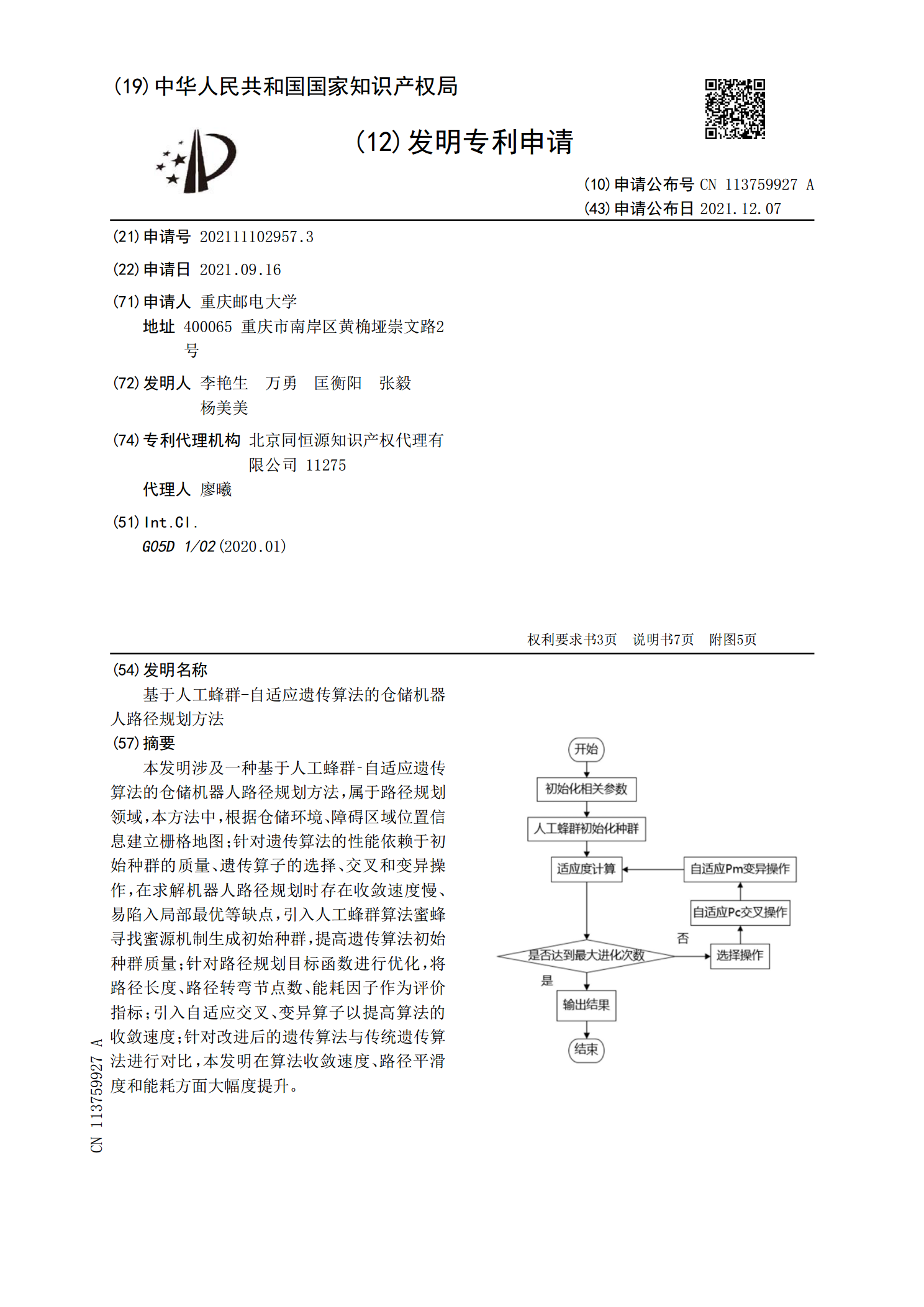
本发明涉及一种基于人工蜂群‑自适应遗传算法的仓储机器人路径规划方法,属于路径规划领域,本方法中,根据仓储环境、障碍区域位置信息建立栅格地图;针对遗传算法的性能依赖于初始种群的质量、遗传算子的选择、交叉和变异操作,在求解机器人路径规划时存在收敛速度慢、易陷入局部最优等缺点,引入人工蜂群算法蜜蜂寻找蜜源机制生成初始种群,提高遗传算法初始种群质量;针对路径规划目标函数进行优化,将路径长度、路径转弯节点数、能耗因子作为评价指标;引入自适应交叉、变异算子以提高算法的收敛速度;针对改进后的遗传算法与传统遗传算法进行对
基于多目标人工蜂群算法的多机器人路径规划方法.pdf
本发明提出一种基于多目标人工蜂群算法的多机器人路径规划方法,属于路径规划技术领域,包括:路径规划问题的环境建模、多目标人工蜂群算法的参数初始化、三种蜜蜂迭代优化路径并确定非劣解集、排序保留优良路径和输出最优路径集合。本发明基于Pareto支配和拥挤距离的非支配排序的概念对标准人工蜂群算法进行改进,提出了适用于求解多目标优化问题的多目标人工蜂群算法。在路径规划过程中本算法可以考虑路径长度、平滑性和安全性等多个性能指标,并且一次路径规划可以获得一组Pareto最优路径。本发明提出的路径规划方法属于元启发式智能

基于人工蜂群算法的机器人路径规划的中期报告.docx
基于人工蜂群算法的机器人路径规划的中期报告一、研究背景和意义随着机器人技术的不断发展和应用领域的逐步扩展,机器人的路径规划问题越来越受到关注。机器人的路径规划可以看作是在二维空间或者三维空间中寻找一条从起点到终点合法且最优的路径。路径规划在机器人系统中是一个非常重要的环节,目的是为机器人提供安全可靠的路径相应地行走。随着机器人数量的不断增加,路径规划的计算量也逐渐增加,因此需要一种高效的算法来解决该问题。人工蜂群算法是一种基于蜜蜂的社会行为的进化算法,具有全局收敛性、鲁棒性、适应性强等优点,在解决多维优化
基于遗传算法的机器人路径规划.pdf
4.3基于遗传算法的机器人路径规划4.3.1遗传算法简介[50][51]在1975年前后,美国Michigan大学JohnHHolland教授根据达尔文的适者生存的进化理论研究出一种人工智能的方法——遗传算法,这种算法以生物进化、遗传原理来设计算法的原理,在算法里面还添加了统计理论学随机过程等数学方法,最终形成了该算法一种独特的理论。遗传算法在求解时,先从一个初始群体的变量开始,依次求解出最佳解,最后得出满足预设的算法要求的迭代次数为最后结果。这种算法是迭代算法的一种。遗传算法是模拟大自然中生物生存的理念
基于改进人工蜂群算法的移动机器人路径规划方法.pdf
本发明公开了一种基于改进人工蜂群算法的移动机器人路径规划方法,将人工蜂群算法每次迭代产生的最优解代入到灰狼优化算法的狩猎阶段,利用灰狼优化算法生成新的蜜源位置;在雇佣蜂阶段邻域搜索时引入该蜜源,以此来提高人工蜂群的局部搜索能力;将全局最优解代入侦察蜂阶段,改进蜜源搜索方程,使算法更容易摆脱局部最优;将改进算法GW‑ABC应用到移动机器人路径规划中,实验结果表明,改进算法的搜索能力更强,收敛速度更快。