
一种新型自动旋转翻炒电磁炉.pdf

志玉****爱啊

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种新型自动旋转翻炒电磁炉.pdf
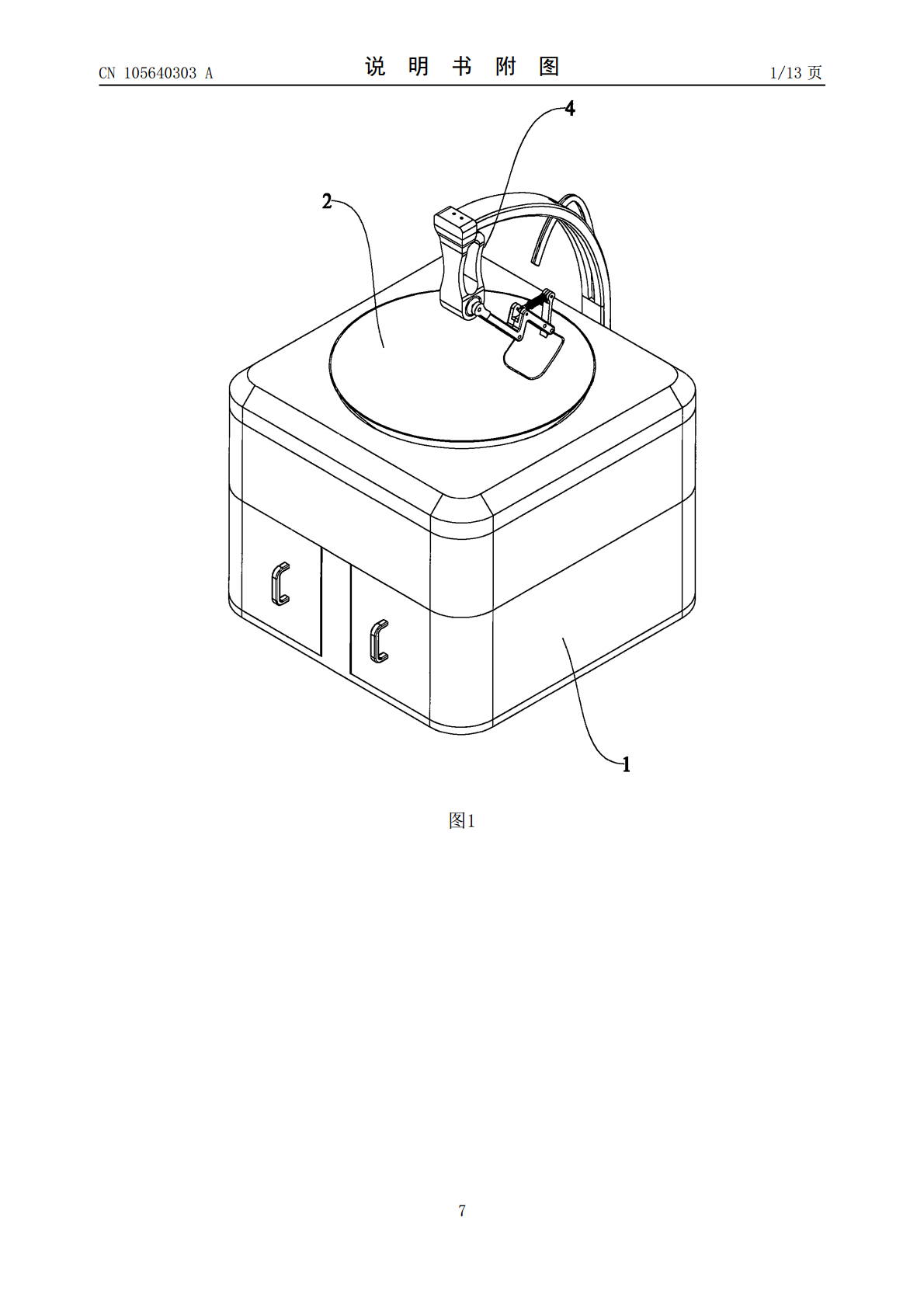
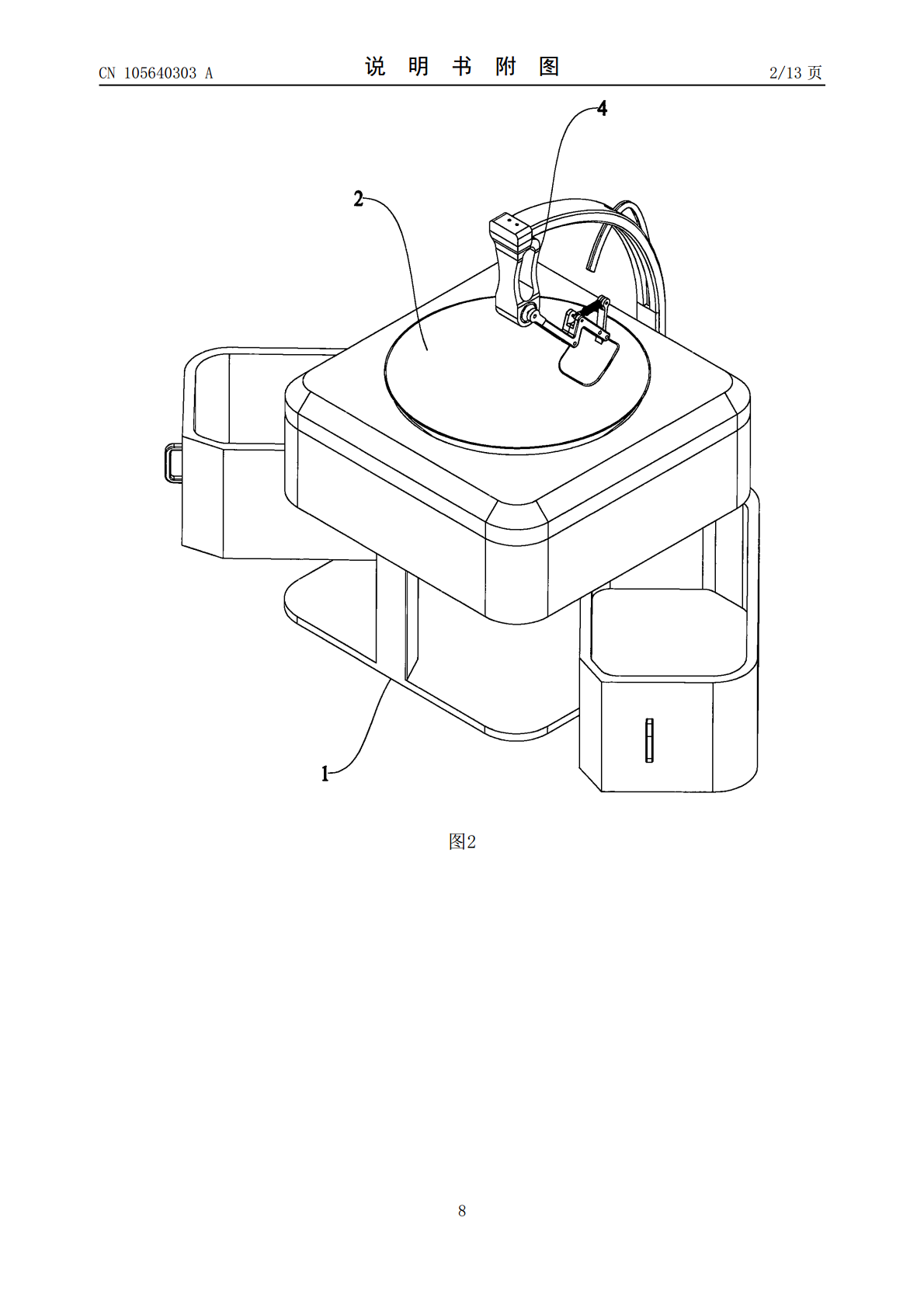
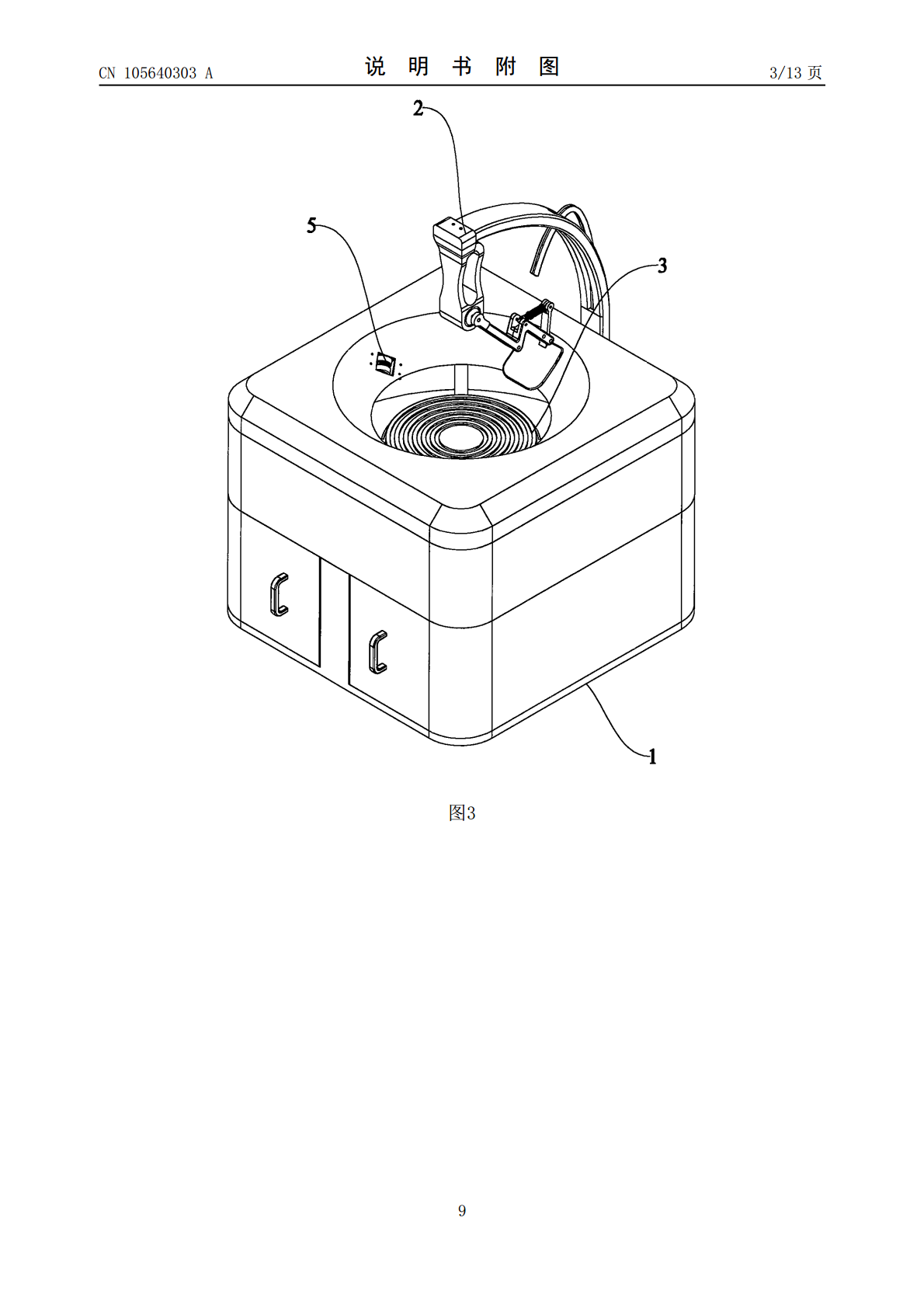
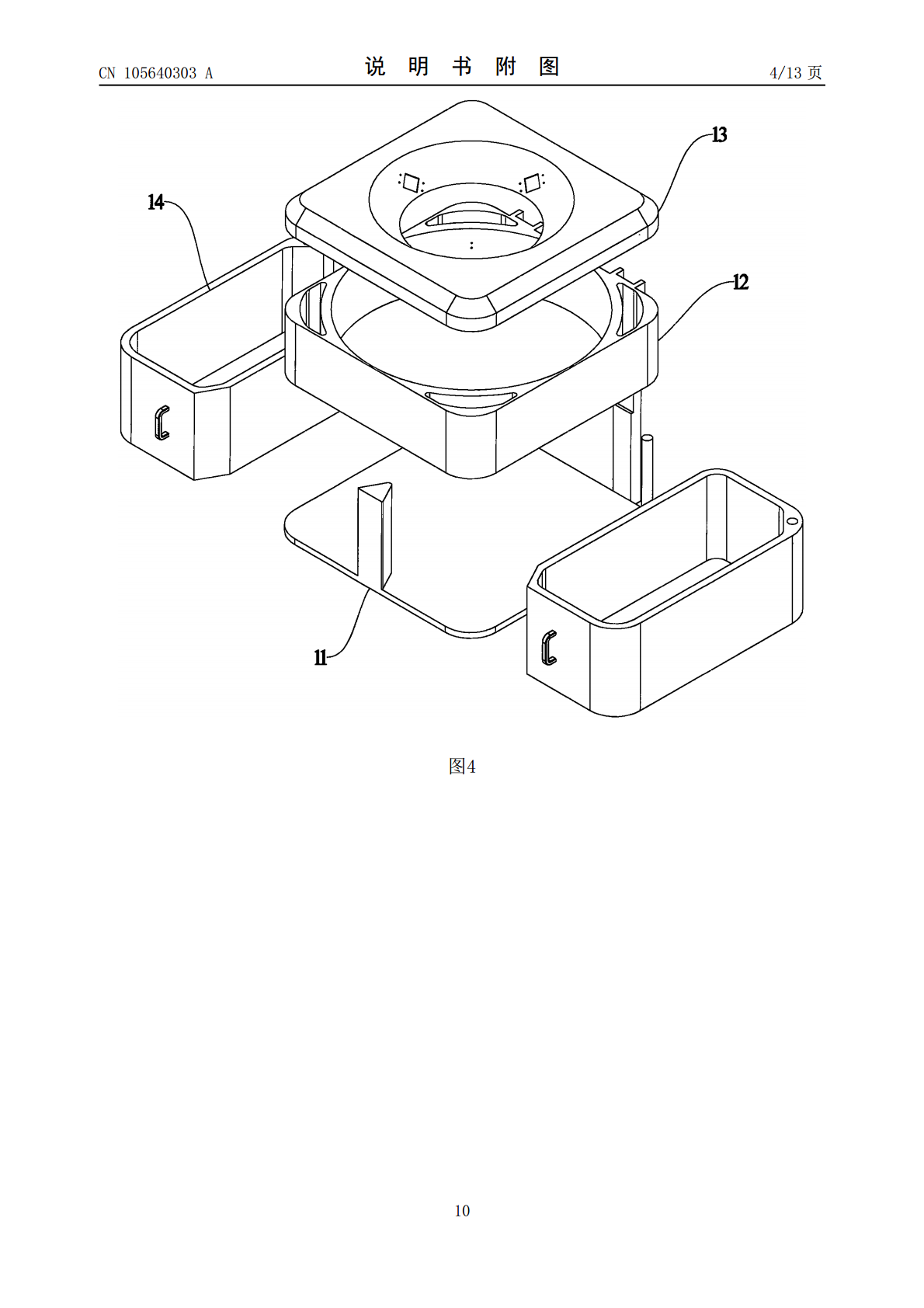
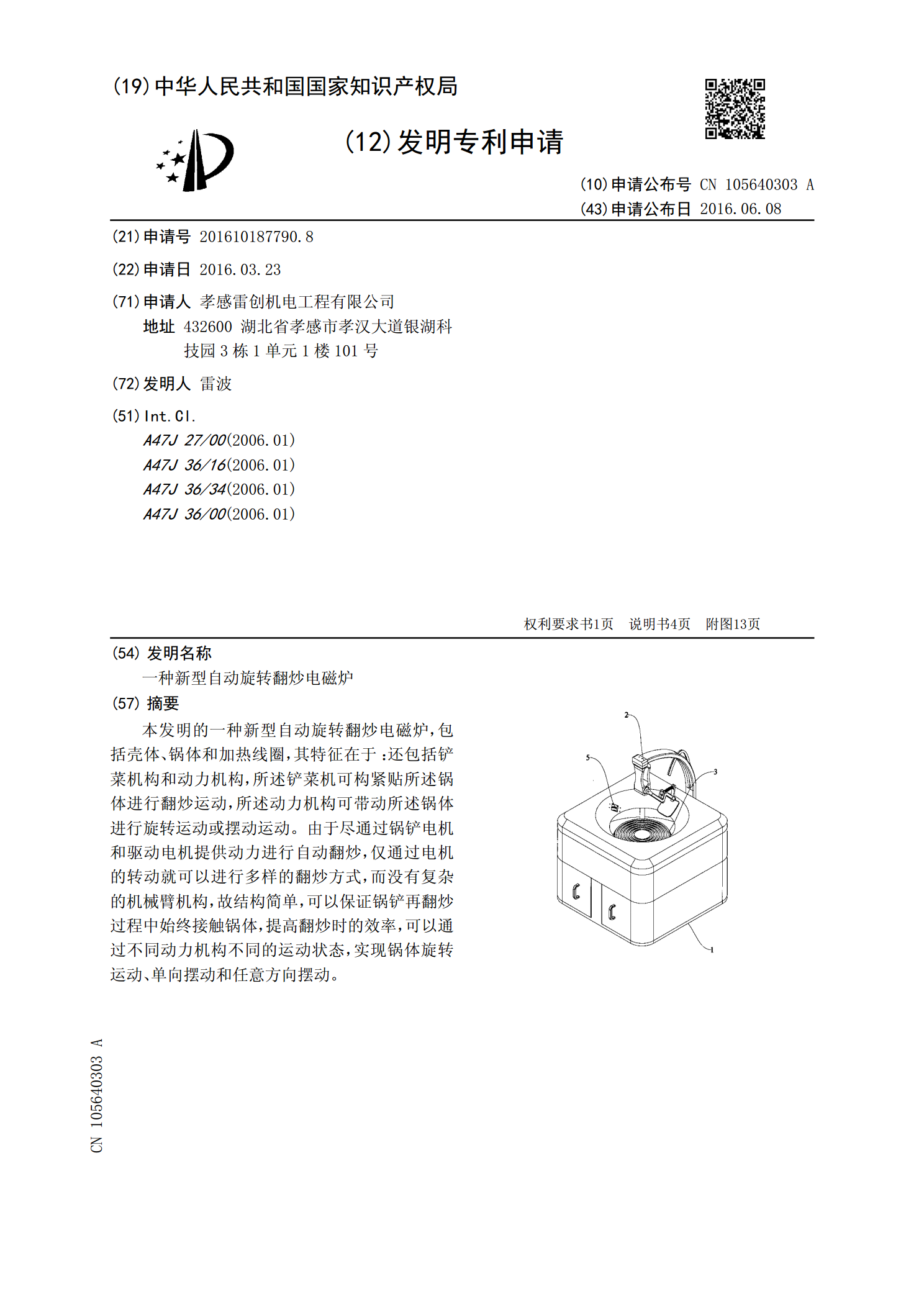
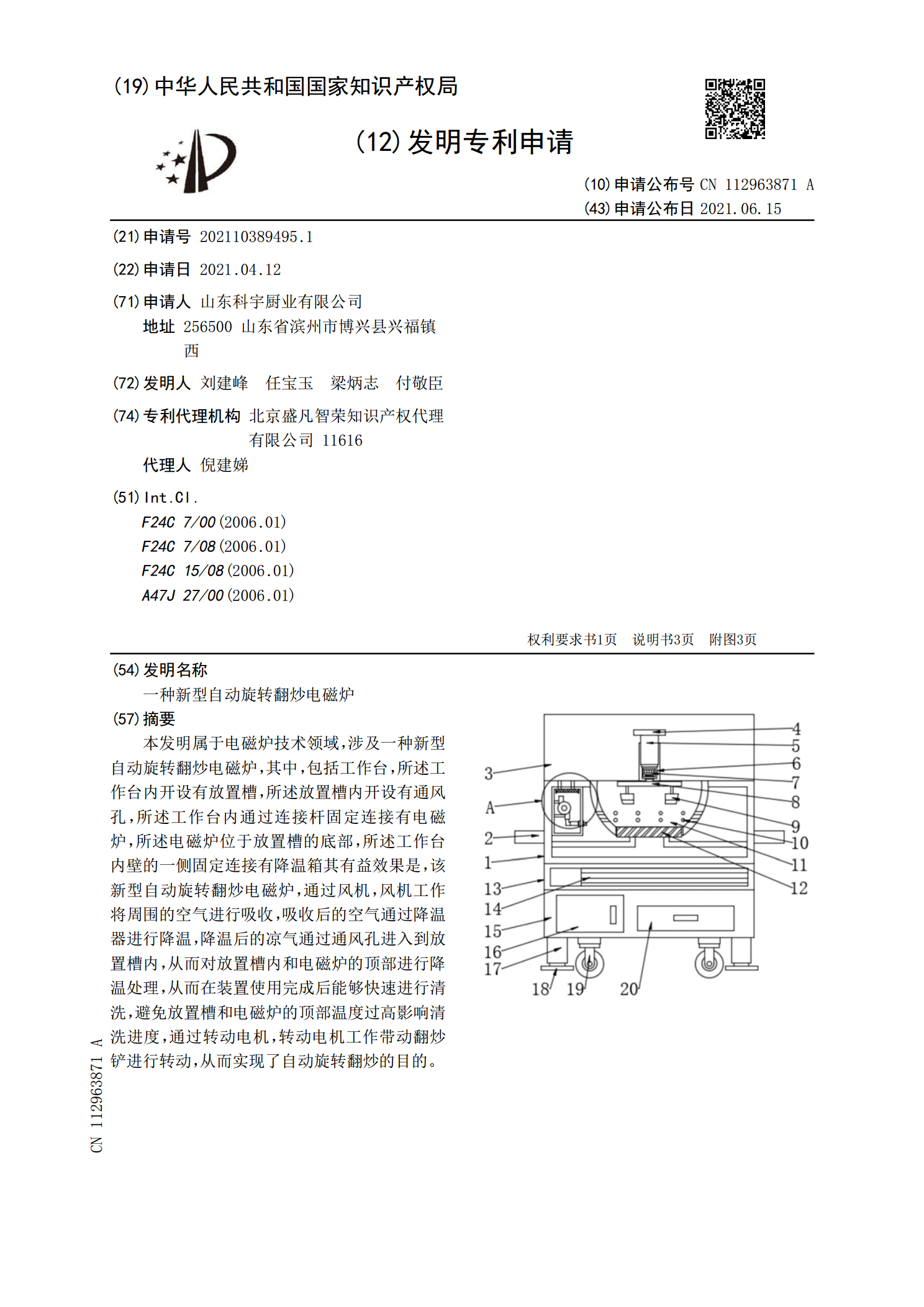
本发明的一种新型自动旋转翻炒电磁炉,包括壳体、锅体和加热线圈,其特征在于:还包括铲菜机构和动力机构,所述铲菜机可构紧贴所述锅体进行翻炒运动,所述动力机构可带动所述锅体进行旋转运动或摆动运动。由于尽通过锅铲电机和驱动电机提供动力进行自动翻炒,仅通过电机的转动就可以进行多样的翻炒方式,而没有复杂的机械臂机构,故结构简单,可以保证锅铲再翻炒过程中始终接触锅体,提高翻炒时的效率,可以通过不同动力机构不同的运动状态,实现锅体旋转运动、单向摆动和任意方向摆动。
一种新型自动旋转翻炒电磁炉.pdf
本发明属于电磁炉技术领域,涉及一种新型自动旋转翻炒电磁炉,其中,包括工作台,所述工作台内开设有放置槽,所述放置槽内开设有通风孔,所述工作台内通过连接杆固定连接有电磁炉,所述电磁炉位于放置槽的底部,所述工作台内壁的一侧固定连接有降温箱其有益效果是,该新型自动旋转翻炒电磁炉,通过风机,风机工作将周围的空气进行吸收,吸收后的空气通过降温器进行降温,降温后的凉气通过通风孔进入到放置槽内,从而对放置槽内和电磁炉的顶部进行降温处理,从而在装置使用完成后能够快速进行清洗,避免放置槽和电磁炉的顶部温度过高影响清洗进度,通

一种新型自动旋转推送装置.pdf
本发明公开了一种新型自动旋转推送装置,包括托送箱、支撑板、支撑杆、液压杆、液压缸、底座、车轮、大齿轮、中齿轮、步进电机、卡扣、工作齿轮、齿条、小齿轮、伺服电机。其中工作齿轮在升降车到达地面后通过卡扣收起至支撑板内,支撑板下方的大齿轮和中齿轮在步进电机的带动下实现啮合,从而通过大齿轮的旋转完成支撑板和托送箱的整体旋转,实现升降车的旋转功能;托送箱底面两侧安装有齿条,支撑板上安装有小齿轮,小齿轮在伺服电机的带动下,通过与齿条的啮合实现了托送箱的推送运动。将这种可实现自动旋转推送升降车应用于大型高空搬运设备中,
一种自动翻炒锅.pdf
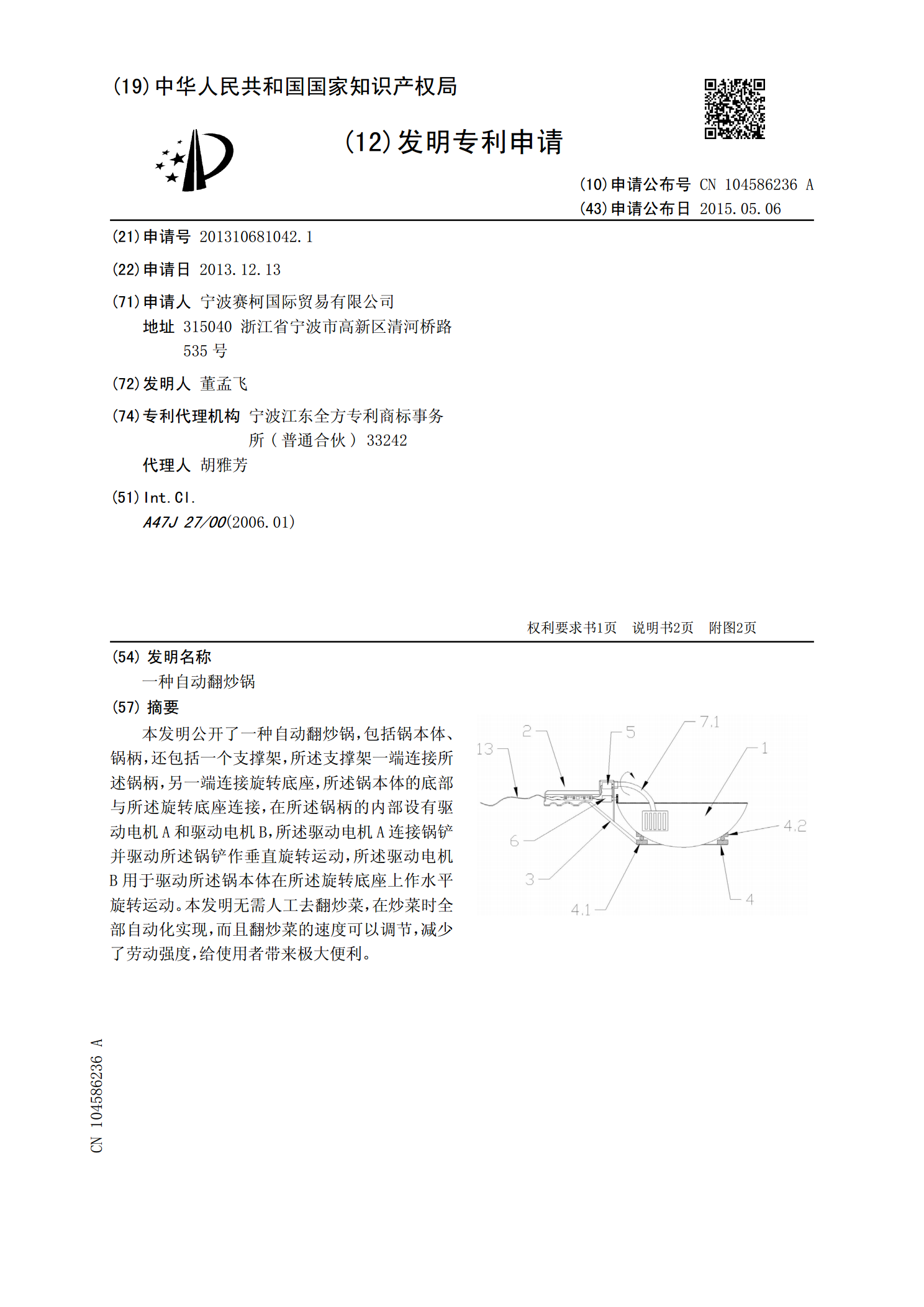
本发明公开了一种自动翻炒锅,包括锅本体、锅柄,还包括一个支撑架,所述支撑架一端连接所述锅柄,另一端连接旋转底座,所述锅本体的底部与所述旋转底座连接,在所述锅柄的内部设有驱动电机A和驱动电机B,所述驱动电机A连接锅铲并驱动所述锅铲作垂直旋转运动,所述驱动电机B用于驱动所述锅本体在所述旋转底座上作水平旋转运动。本发明无需人工去翻炒菜,在炒菜时全部自动化实现,而且翻炒菜的速度可以调节,减少了劳动强度,给使用者带来极大便利。
一种自动翻炒锅.pdf
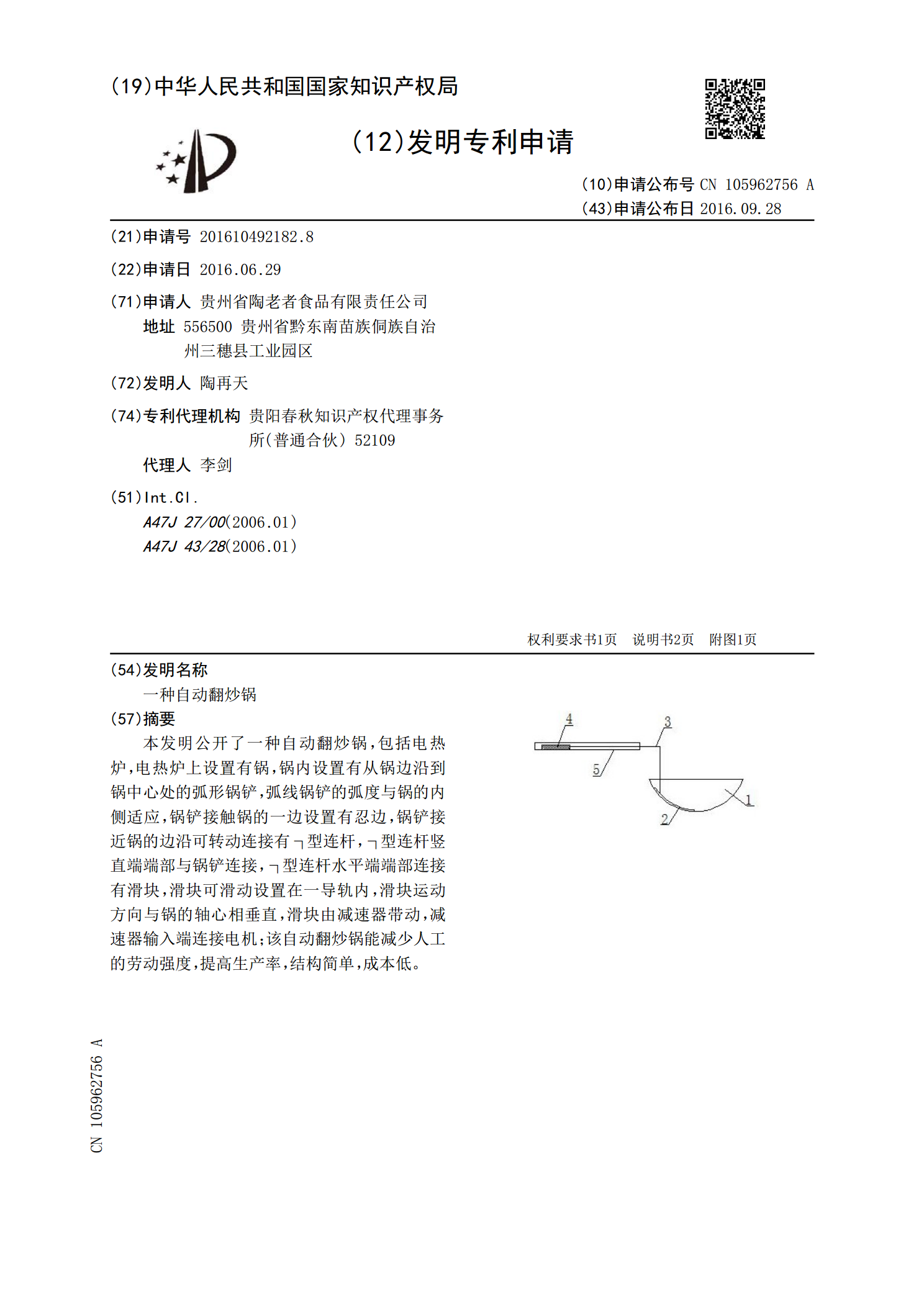
本发明公开了一种自动翻炒锅,包括电热炉,电热炉上设置有锅,锅内设置有从锅边沿到锅中心处的弧形锅铲,弧线锅铲的弧度与锅的内侧适应,锅铲接触锅的一边设置有忍边,锅铲接近锅的边沿可转动连接有┐型连杆,┐型连杆竖直端端部与锅铲连接,┐型连杆水平端端部连接有滑块,滑块可滑动设置在一导轨内,滑块运动方向与锅的轴心相垂直,滑块由减速器带动,减速器输入端连接电机;该自动翻炒锅能减少人工的劳动强度,提高生产率,结构简单,成本低。