
一种用于锅炉内壁相贯线焊缝的识别方法.pdf

邻家****mk

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于锅炉内壁相贯线焊缝的识别方法.pdf
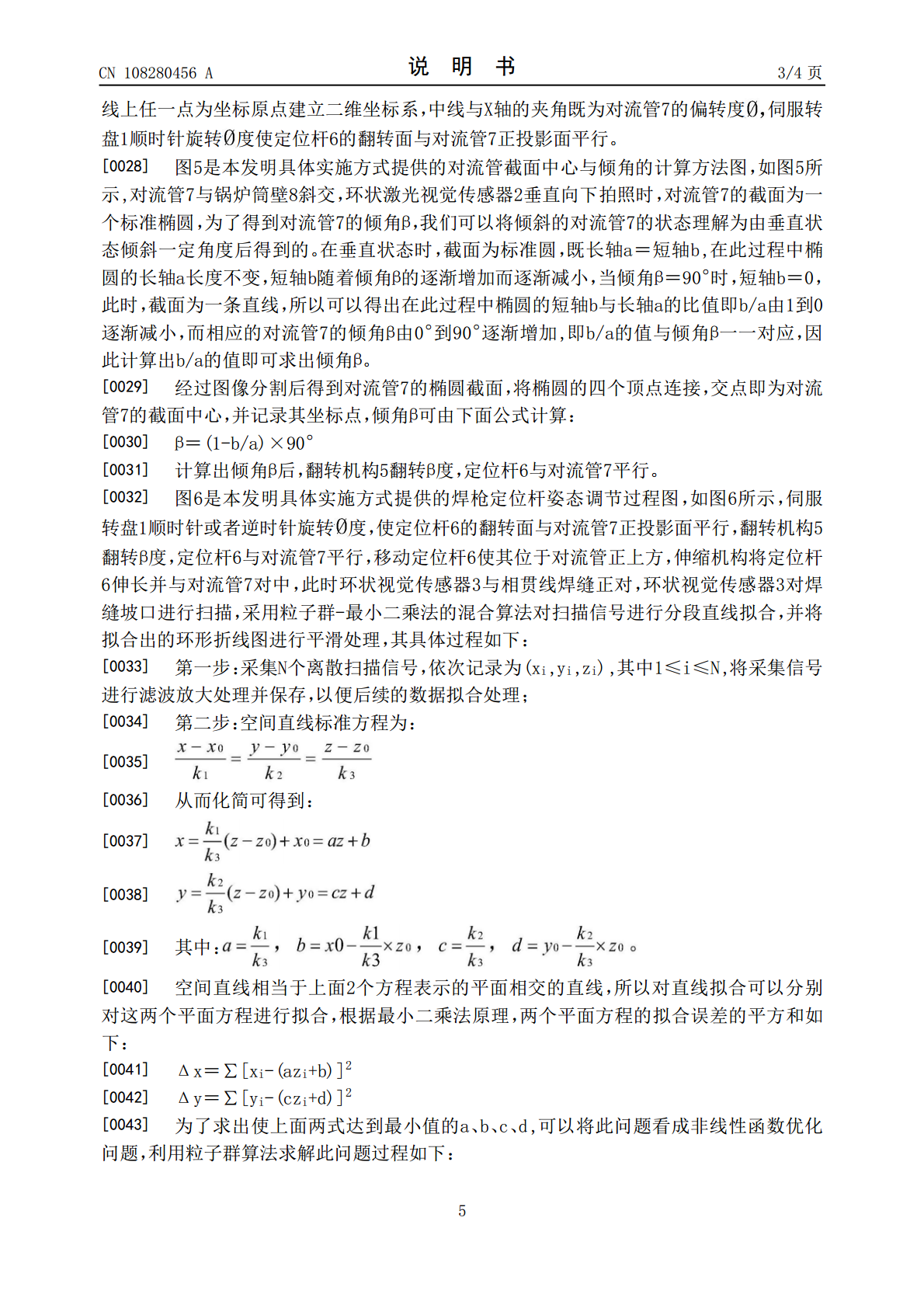
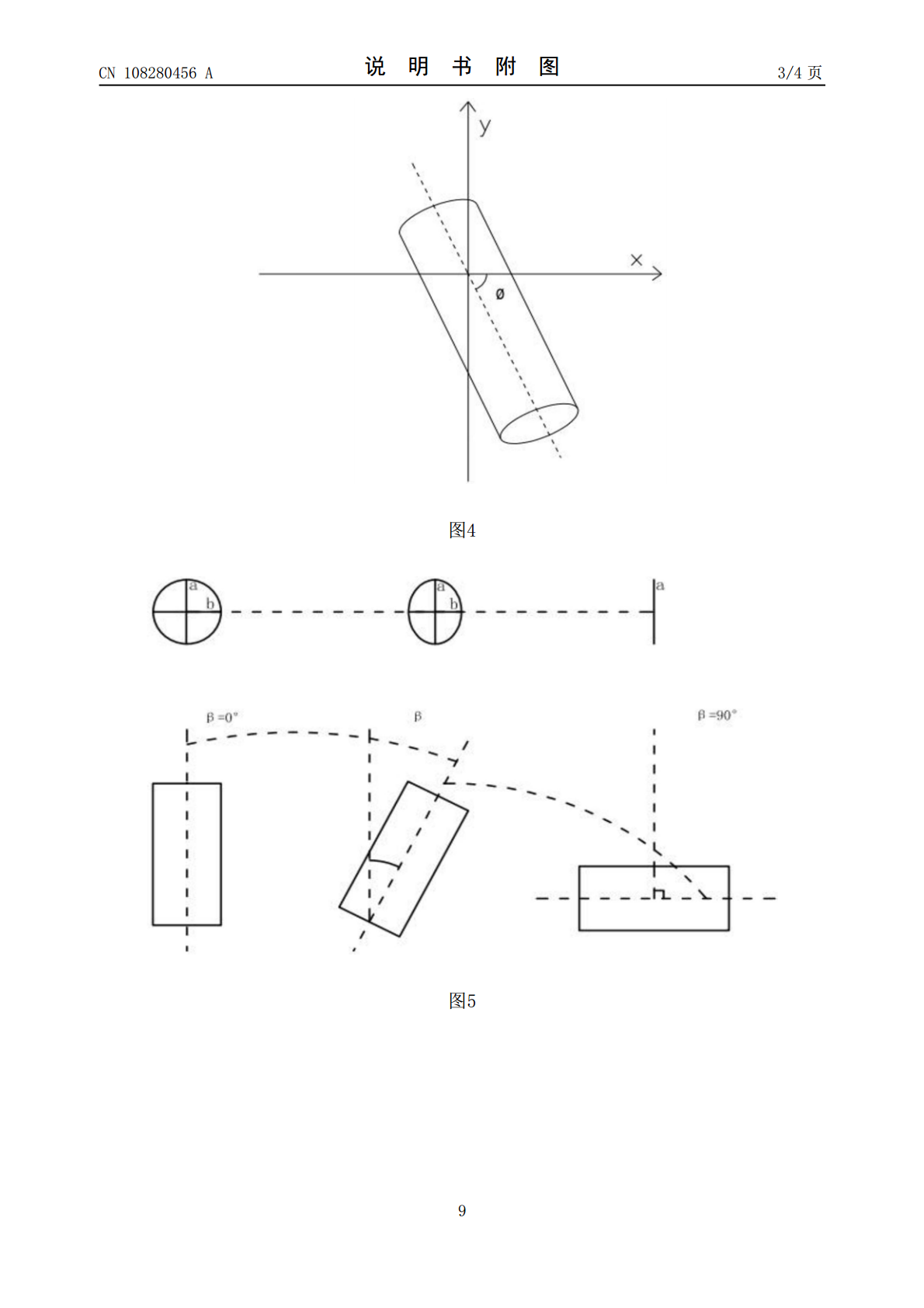
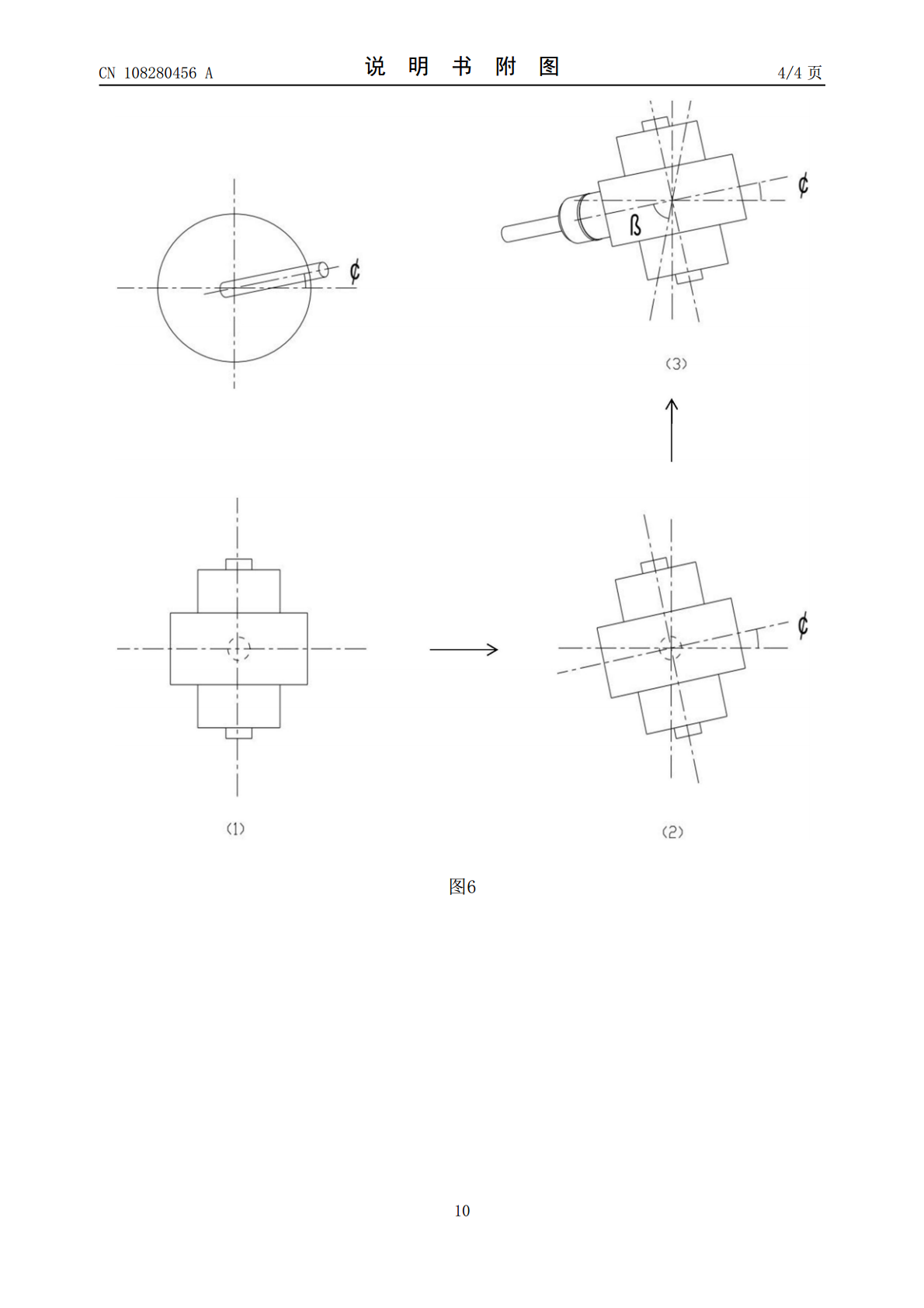
一种用于锅炉内壁相贯线焊缝的识别方法,应用于锅炉内壁与对流管的相贯线焊接。通过环状激光视觉传感器采集图像,经图像分割,识别对流管的偏转度、截面中心并计算出倾角。调整伺服转盘使定位杆的翻转面与对流管正投影面平行,调整翻转机构使定位杆与对流管平行,移动定位杆使其位于对流管正上方,伸缩机构将定位杆伸长并与对流管对中。环状视觉传感器对焊缝坡口进行扫描,对扫描信号进行拟合及平滑处理,得出相贯线焊缝。此方法算法简单,能快速准确识别对流管倾角及焊缝位置,焊枪定位杆倾角调节步骤少,焊接误差小、效率高。

一种小角度相贯线焊缝检测的采集车.pdf
本发明公开了一种小角度相贯线焊缝检测的采集车,包括基座,其中,所述基座呈U形,所述基座的底部设置有可吸附并行走于待测管件表面的行走机构,所述基座设置有可与待测管件表面贴合并用于检测相贯线焊缝的探头,所述探头通过角度调整机构固定于所述基座的前方,所述基座后侧设置有用于调节所述基座升降的高度调节机构。上述小角度相贯线焊缝检测的采集车,包括U形的基座,减少采集车的高度使其能够进入狭小空间;底部设置有可吸附并行走于管件表面的行走机构,使采集车可停留于任意曲面并沿曲面的任意路径行走;角度调整机构和高度调节机构,使探
一种用于相贯线焊接的新型工装.pdf
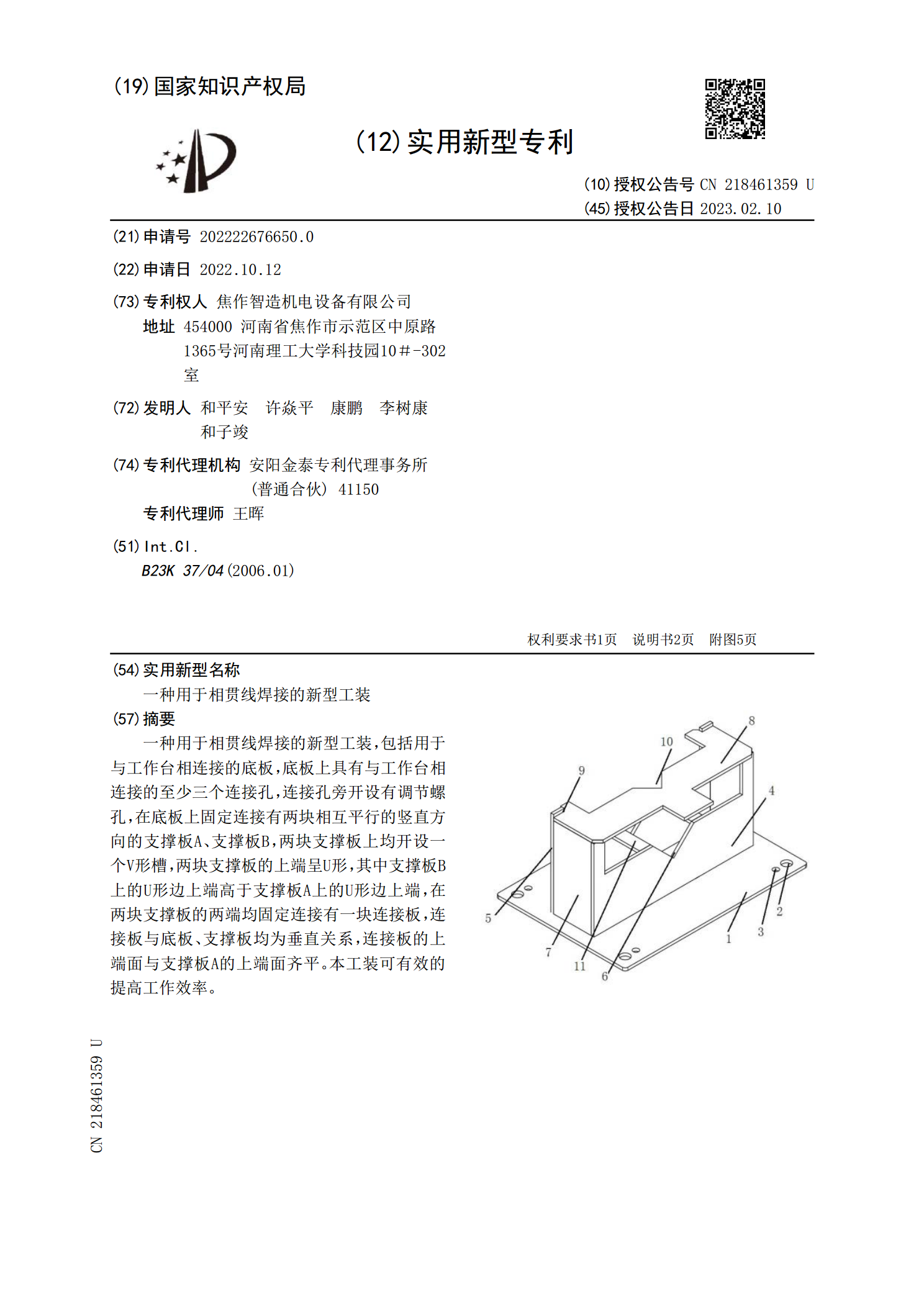
一种用于相贯线焊接的新型工装,包括用于与工作台相连接的底板,底板上具有与工作台相连接的至少三个连接孔,连接孔旁开设有调节螺孔,在底板上固定连接有两块相互平行的竖直方向的支撑板A、支撑板B,两块支撑板上均开设一个V形槽,两块支撑板的上端呈U形,其中支撑板B上的U形边上端高于支撑板A上的U形边上端,在两块支撑板的两端均固定连接有一块连接板,连接板与底板、支撑板均为垂直关系,连接板的上端面与支撑板A的上端面齐平。本工装可有效的提高工作效率。
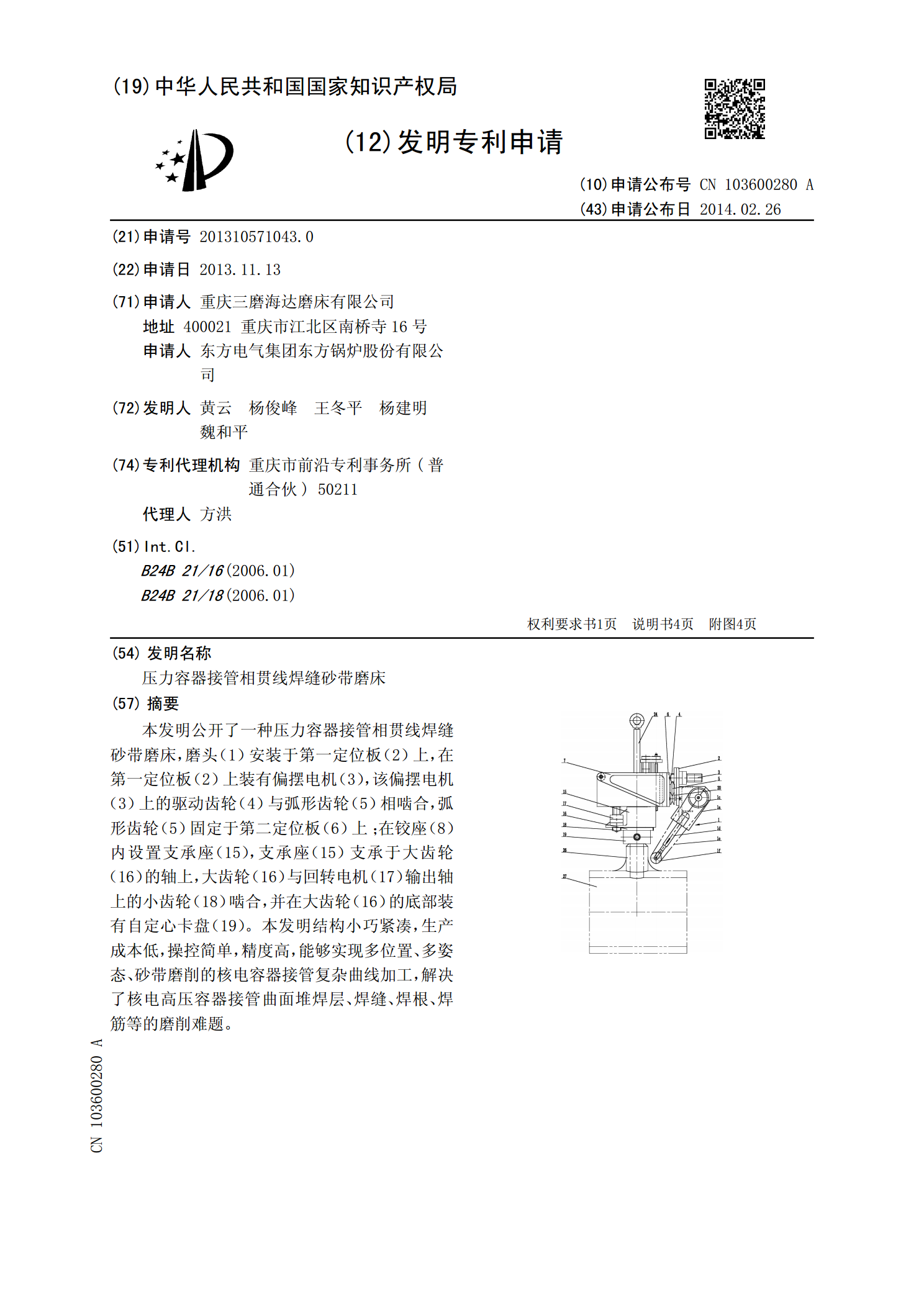
压力容器接管相贯线焊缝砂带磨床.pdf
本发明公开了一种压力容器接管相贯线焊缝砂带磨床,磨头(1)安装于第一定位板(2)上,在第一定位板(2)上装有偏摆电机(3),该偏摆电机(3)上的驱动齿轮(4)与弧形齿轮(5)相啮合,弧形齿轮(5)固定于第二定位板(6)上;在铰座(8)内设置支承座(15),支承座(15)支承于大齿轮(16)的轴上,大齿轮(16)与回转电机(17)输出轴上的小齿轮(18)啮合,并在大齿轮(16)的底部装有自定心卡盘(19)。本发明结构小巧紧凑,生产成本低,操控简单,精度高,能够实现多位置、多姿态、砂带磨削的核电容器接管复杂曲
相贯线的画法与识读——相贯线.pptx
§2-5相贯线的画法与识读一、圆柱与圆柱正交二、圆柱与圆锥正交主要内容总结