
一种渣液面实时检测方法、装置、设备及存储介质.pdf

傲丝****账号

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种渣液面实时检测方法、装置、设备及存储介质.pdf
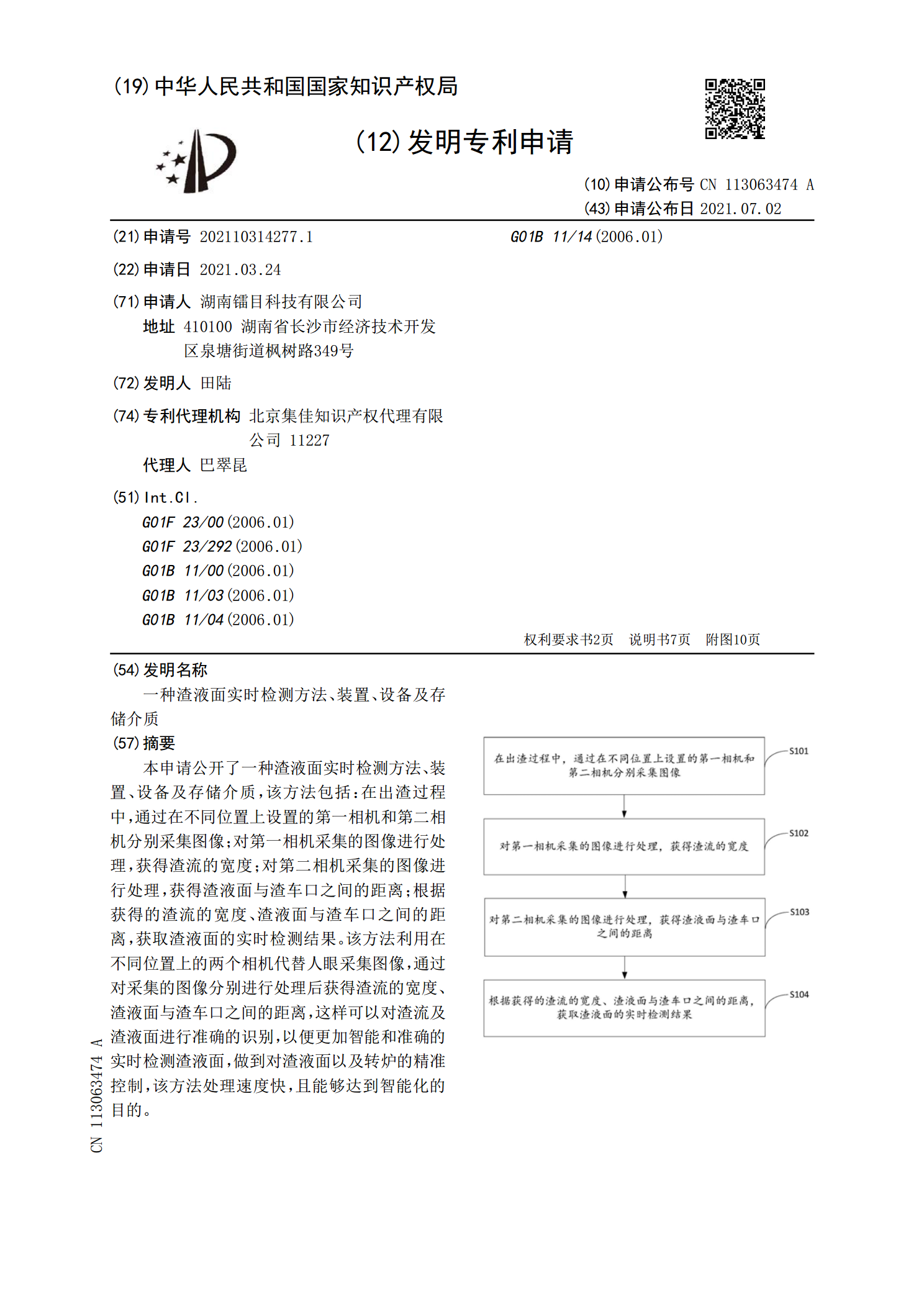
本申请公开了一种渣液面实时检测方法、装置、设备及存储介质,该方法包括:在出渣过程中,通过在不同位置上设置的第一相机和第二相机分别采集图像;对第一相机采集的图像进行处理,获得渣流的宽度;对第二相机采集的图像进行处理,获得渣液面与渣车口之间的距离;根据获得的渣流的宽度、渣液面与渣车口之间的距离,获取渣液面的实时检测结果。该方法利用在不同位置上的两个相机代替人眼采集图像,通过对采集的图像分别进行处理后获得渣流的宽度、渣液面与渣车口之间的距离,这样可以对渣流及渣液面进行准确的识别,以便更加智能和准确的实时检测渣液

一种液面检测方法、血液分析装置及存储介质.pdf
本申请公开了一种液面检测方法、血液分析装置及存储介质,该方法包括:控制采样针从初始位置以第一速度向液面方向移动;在采样针移动至预设位置时,调整采样针的移动速度至第二速度,第二速度小于第一速度;在采样针以第二速度保持第一时间段后,控制采样针继续向液面方向移动。通过这样的方式,能够提高液面检测的准确性。
快递面单检测方法、装置、设备及存储介质.pdf
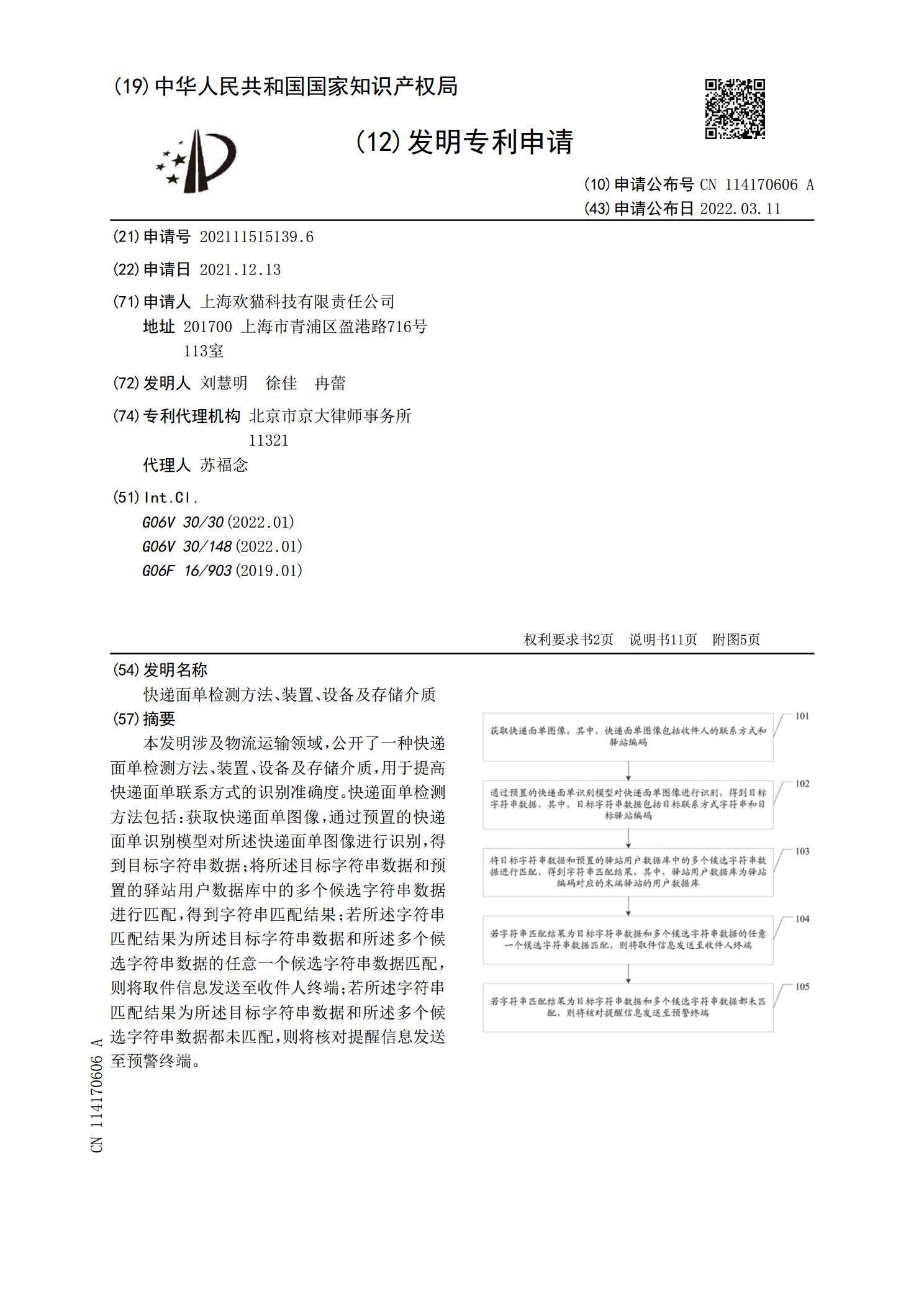
本发明涉及物流运输领域,公开了一种快递面单检测方法、装置、设备及存储介质,用于提高快递面单联系方式的识别准确度。快递面单检测方法包括:获取快递面单图像,通过预置的快递面单识别模型对所述快递面单图像进行识别,得到目标字符串数据;将所述目标字符串数据和预置的驿站用户数据库中的多个候选字符串数据进行匹配,得到字符串匹配结果;若所述字符串匹配结果为所述目标字符串数据和所述多个候选字符串数据的任意一个候选字符串数据匹配,则将取件信息发送至收件人终端;若所述字符串匹配结果为所述目标字符串数据和所述多个候选字符串数据都
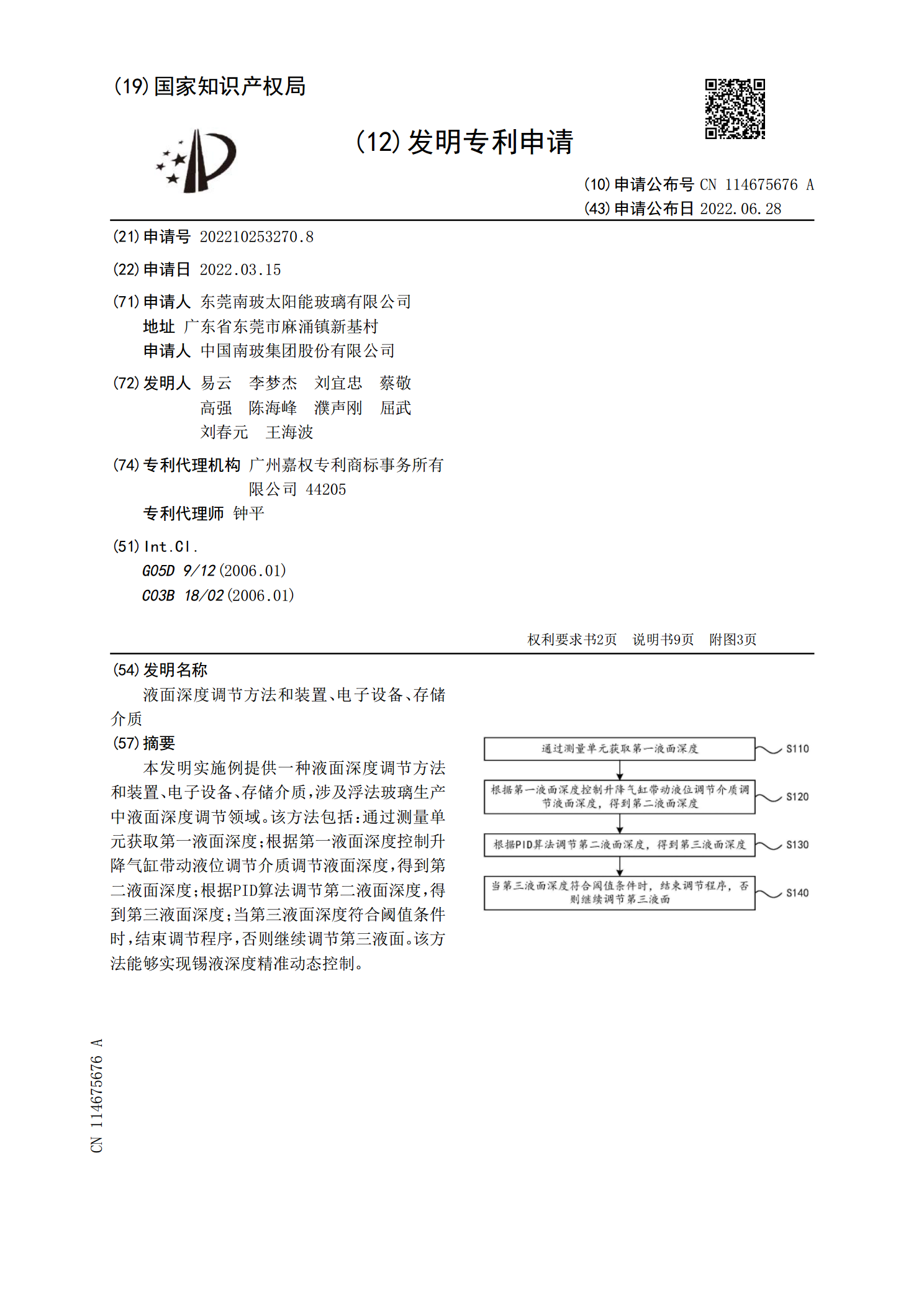
液面深度调节方法和装置、电子设备、存储介质.pdf
本发明实施例提供一种液面深度调节方法和装置、电子设备、存储介质,涉及浮法玻璃生产中液面深度调节领域。该方法包括:通过测量单元获取第一液面深度;根据第一液面深度控制升降气缸带动液位调节介质调节液面深度,得到第二液面深度;根据PID算法调节第二液面深度,得到第三液面深度;当第三液面深度符合阈值条件时,结束调节程序,否则继续调节第三液面。该方法能够实现锡液深度精准动态控制。
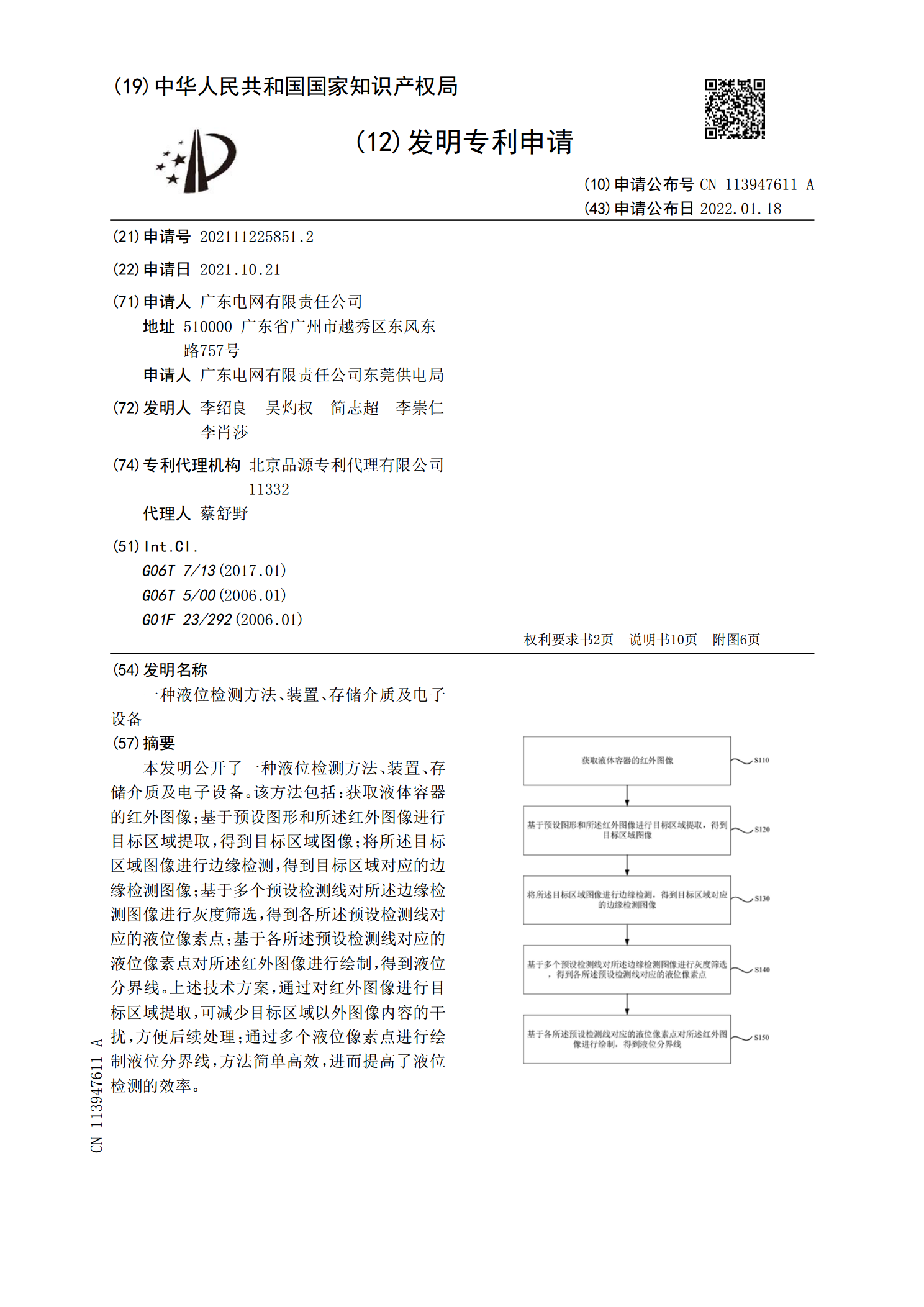
一种液位检测方法、装置、存储介质及电子设备.pdf
本发明公开了一种液位检测方法、装置、存储介质及电子设备。该方法包括:获取液体容器的红外图像;基于预设图形和所述红外图像进行目标区域提取,得到目标区域图像;将所述目标区域图像进行边缘检测,得到目标区域对应的边缘检测图像;基于多个预设检测线对所述边缘检测图像进行灰度筛选,得到各所述预设检测线对应的液位像素点;基于各所述预设检测线对应的液位像素点对所述红外图像进行绘制,得到液位分界线。上述技术方案,通过对红外图像进行目标区域提取,可减少目标区域以外图像内容的干扰,方便后续处理;通过多个液位像素点进行绘制液位分界