
基于符号回归和生成式对抗网络的轨道车辆走行部异常检测方法.pdf

邻家****66

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于符号回归和生成式对抗网络的轨道车辆走行部异常检测方法.pdf
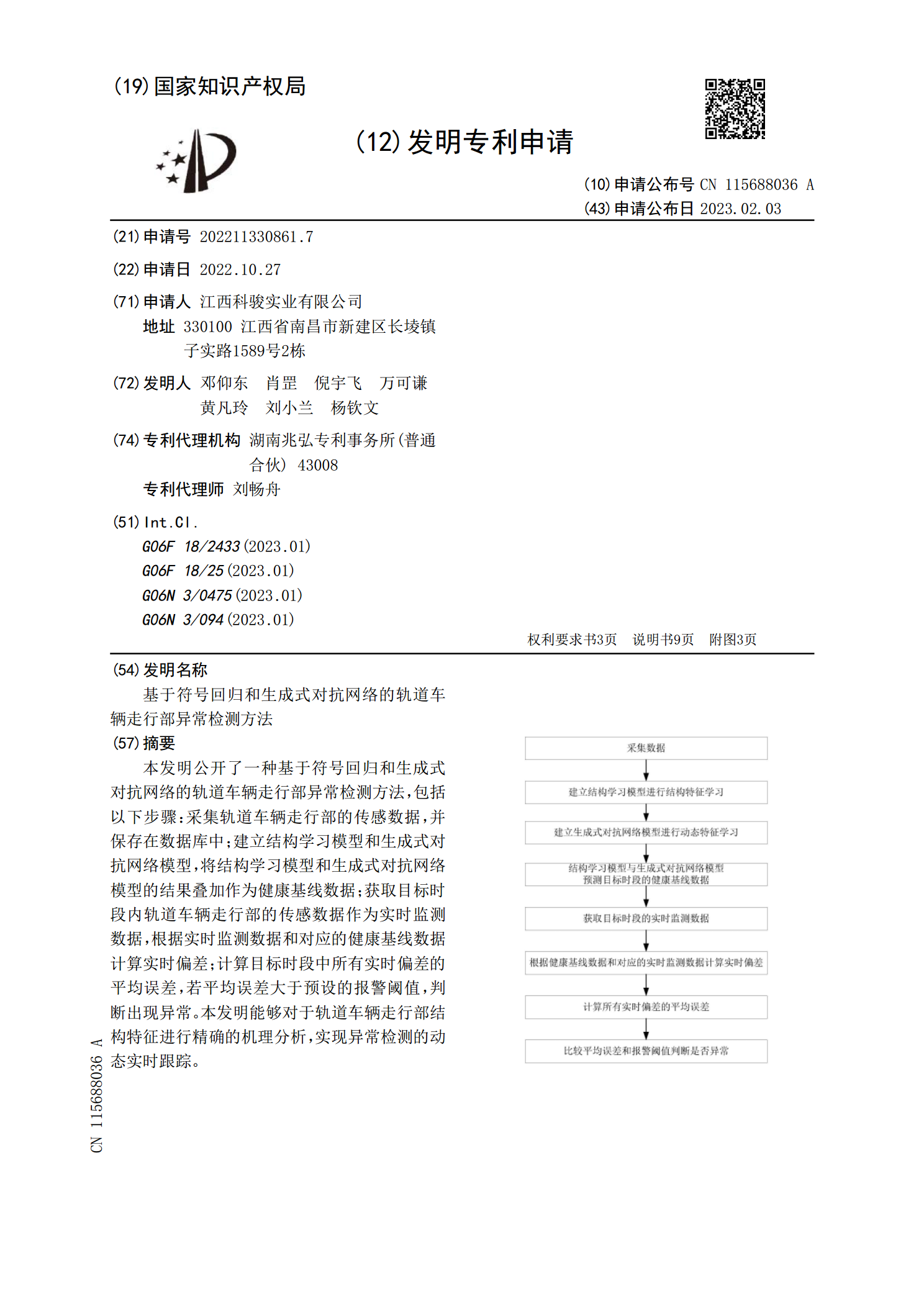
本发明公开了一种基于符号回归和生成式对抗网络的轨道车辆走行部异常检测方法,包括以下步骤:采集轨道车辆走行部的传感数据,并保存在数据库中;建立结构学习模型和生成式对抗网络模型,将结构学习模型和生成式对抗网络模型的结果叠加作为健康基线数据;获取目标时段内轨道车辆走行部的传感数据作为实时监测数据,根据实时监测数据和对应的健康基线数据计算实时偏差;计算目标时段中所有实时偏差的平均误差,若平均误差大于预设的报警阈值,判断出现异常。本发明能够对于轨道车辆走行部结构特征进行精确的机理分析,实现异常检测的动态实时跟踪。
基于能量和镜像生成对抗网络的异常检测方法.pdf
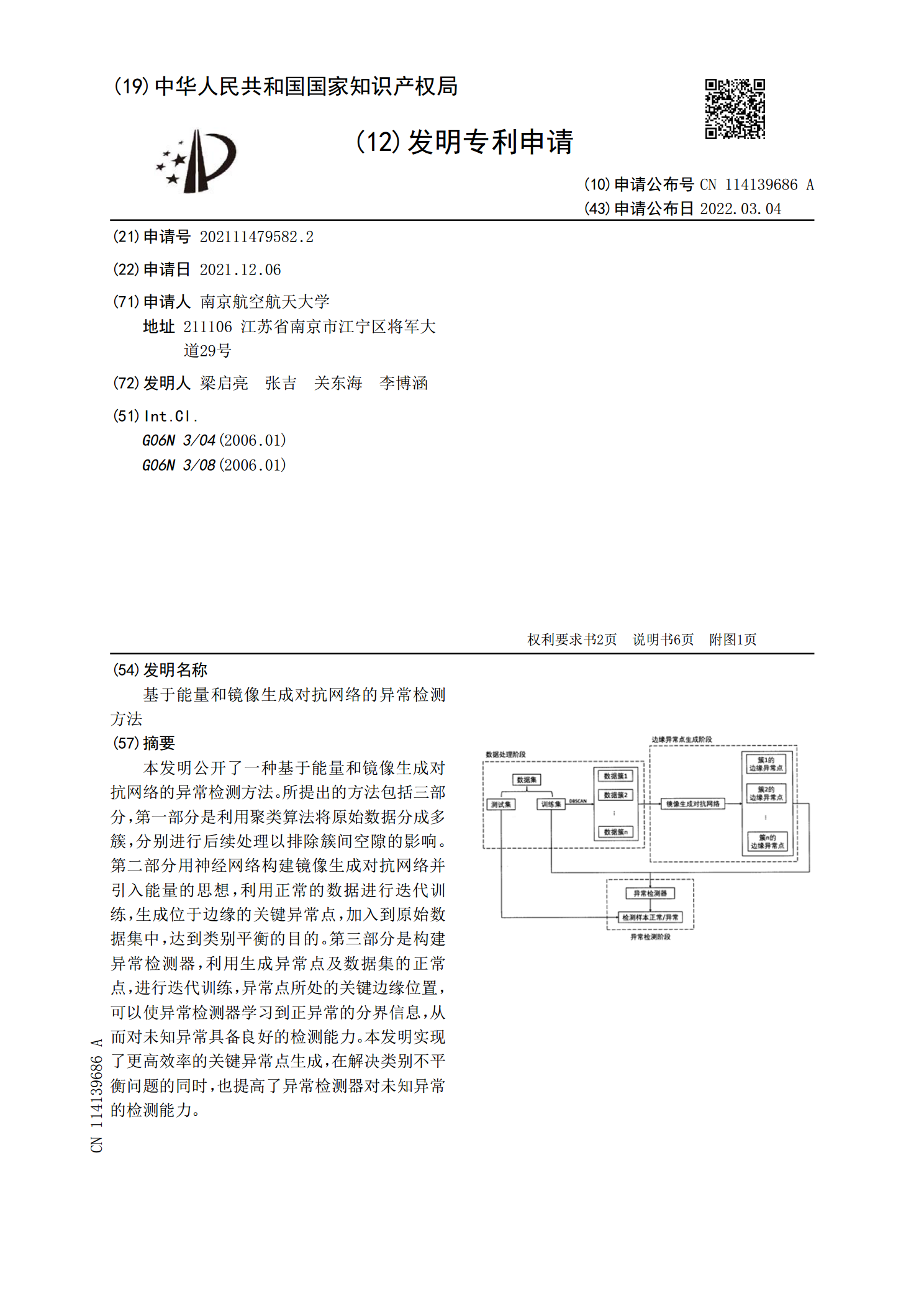
本发明公开了一种基于能量和镜像生成对抗网络的异常检测方法。所提出的方法包括三部分,第一部分是利用聚类算法将原始数据分成多簇,分别进行后续处理以排除簇间空隙的影响。第二部分用神经网络构建镜像生成对抗网络并引入能量的思想,利用正常的数据进行迭代训练,生成位于边缘的关键异常点,加入到原始数据集中,达到类别平衡的目的。第三部分是构建异常检测器,利用生成异常点及数据集的正常点,进行迭代训练,异常点所处的关键边缘位置,可以使异常检测器学习到正异常的分界信息,从而对未知异常具备良好的检测能力。本发明实现了更高效率的关键

基于生成对抗网络的半监督网络流量异常检测方法.pdf
本发明提供了一种基于生成对抗网络的半监督网络流量异常检测方法,首先将网络流量特征进行工程化,即对于字符特征使用one‑hot编码,对于数值特征用归一化处理,再将处理后的特征输入聚合模块中形成新特征进入生成对抗网络,最后通过计算生成对抗网络中两个隐藏向量的重构误差判断流量是否异常。本发明的方法能将数据从高维转向低维空间的同时能更加有效地保留流量特征信息,在解决有监督深度学习无法识别未知流量的同时提升异常网络流量检测的精确度。
基于光照生成对抗网络的课堂听课异常检测方法.pdf
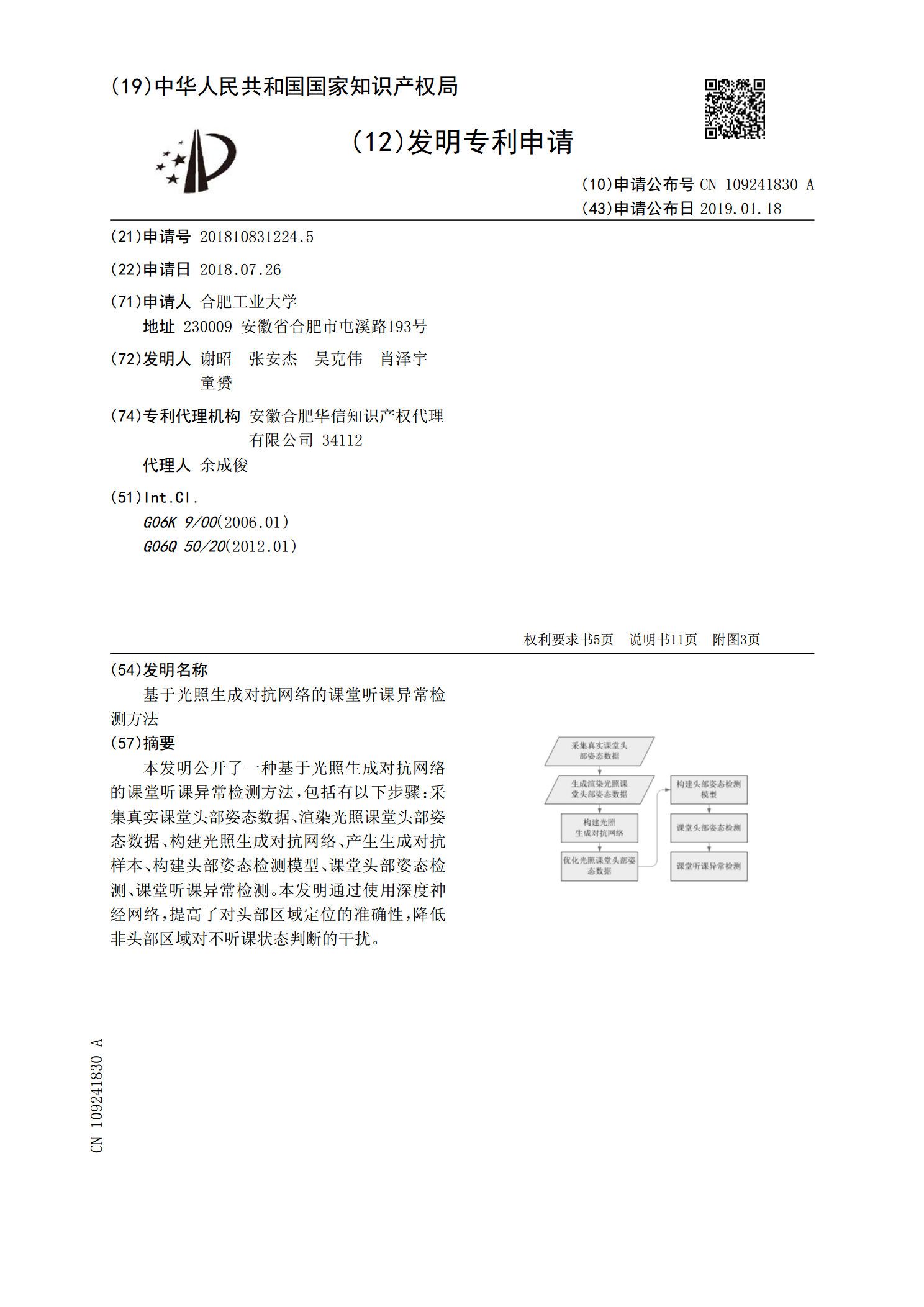
本发明公开了一种基于光照生成对抗网络的课堂听课异常检测方法,包括有以下步骤:采集真实课堂头部姿态数据、渲染光照课堂头部姿态数据、构建光照生成对抗网络、产生生成对抗样本、构建头部姿态检测模型、课堂头部姿态检测、课堂听课异常检测。本发明通过使用深度神经网络,提高了对头部区域定位的准确性,降低非头部区域对不听课状态判断的干扰。

基于生成对抗网络的两阶段图像异常检测方法研究的开题报告.docx
基于生成对抗网络的两阶段图像异常检测方法研究的开题报告摘要图像异常检测作为计算机视觉领域的重要问题,在现实场景中具有广泛的应用价值。本文提出了一种基于生成对抗网络的两阶段图像异常检测方法,该方法分为特征提取和异常检测两个阶段。在特征提取阶段,我们使用预训练的卷积神经网络来提取图像特征。在异常检测阶段,我们基于生成对抗网络(GAN)来学习图像分布,并将此分布与测试样本进行比较。实验结果表明,我们的方法能够比传统方法在多个基准数据集上的表现更好。关键词:图像异常检测;生成对抗网络;特征提取。一、研究背景图像异