
一种智能名优茶叶采摘机结构.pdf

一只****呀9

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能名优茶叶采摘机结构.pdf
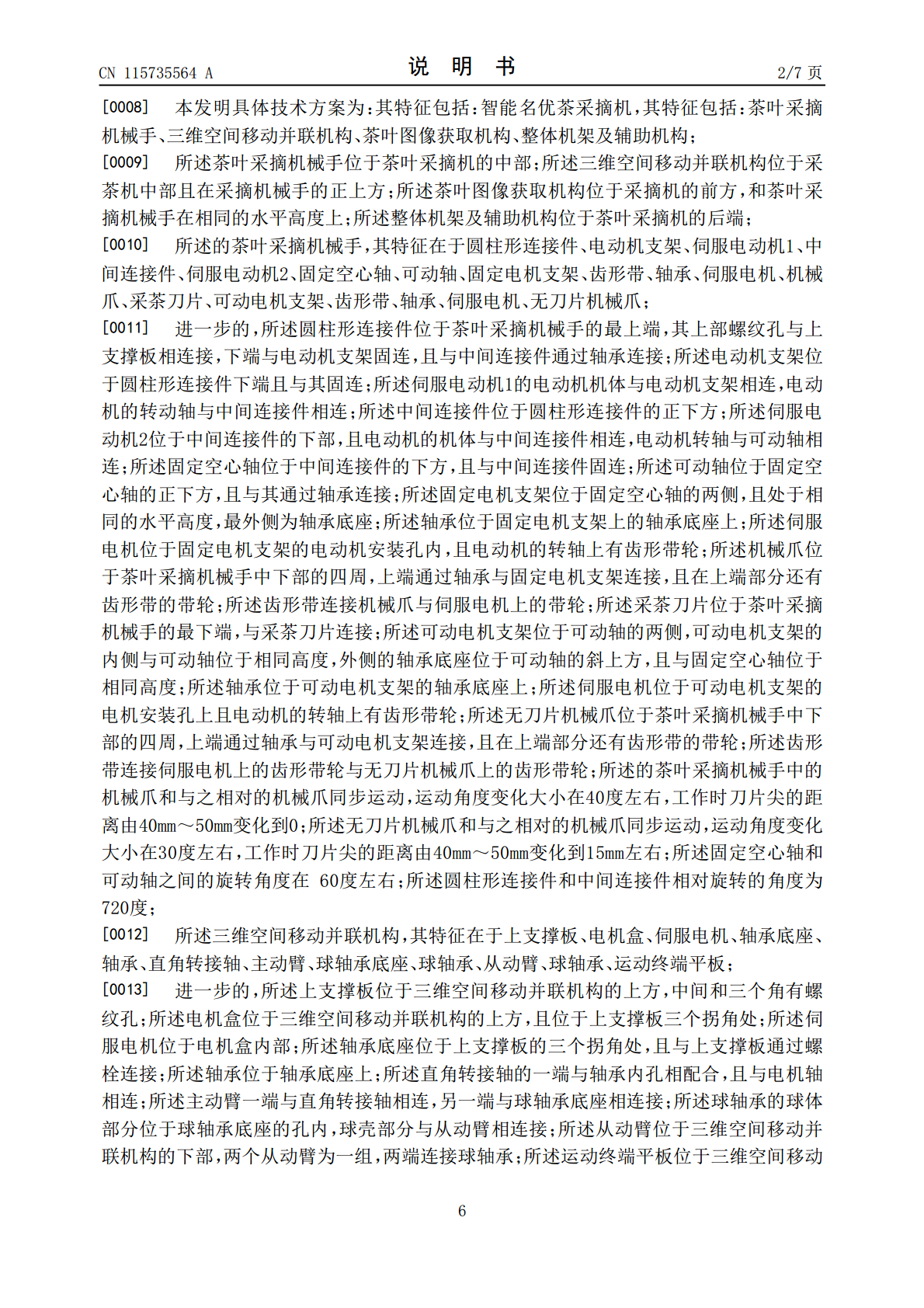
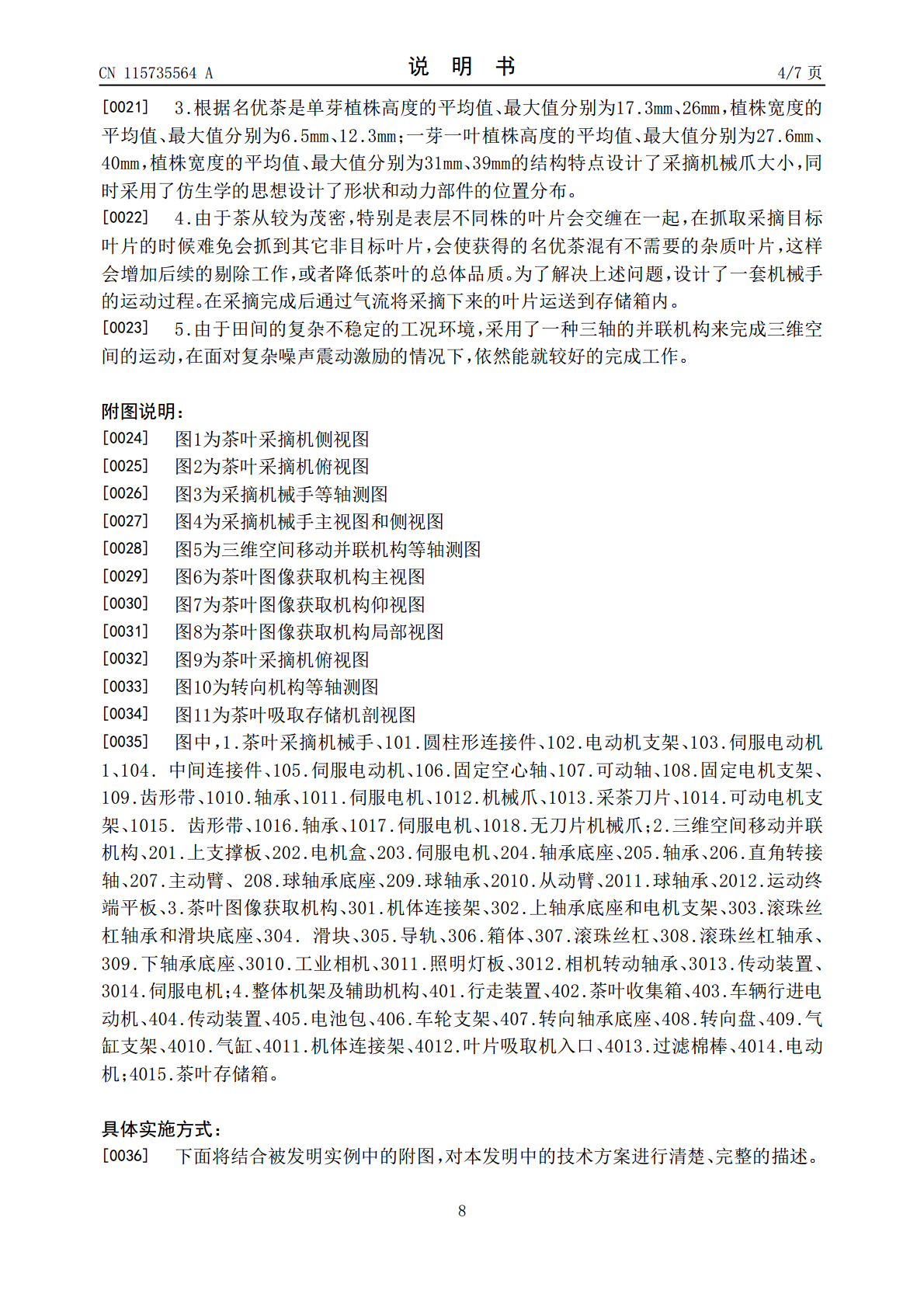
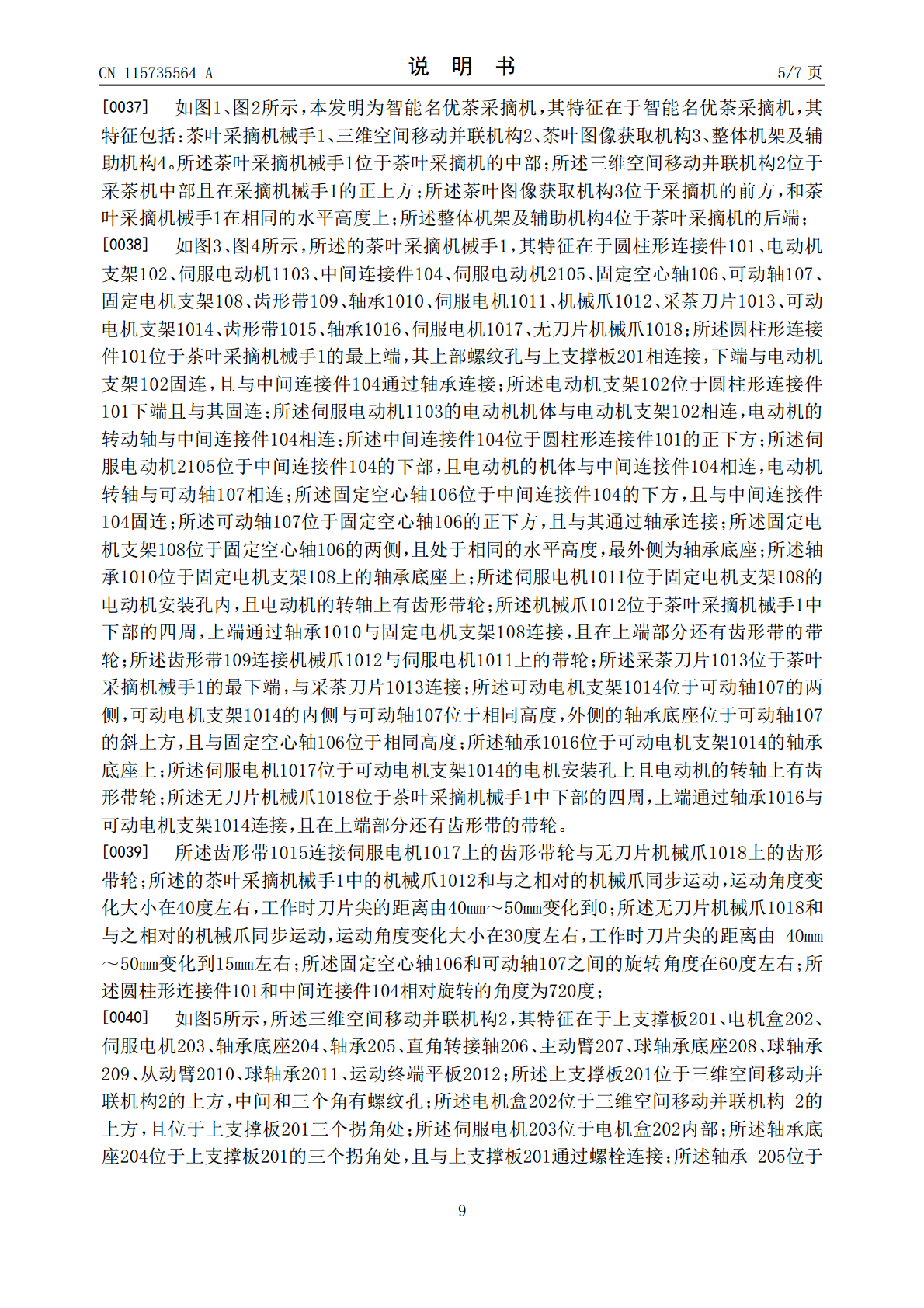
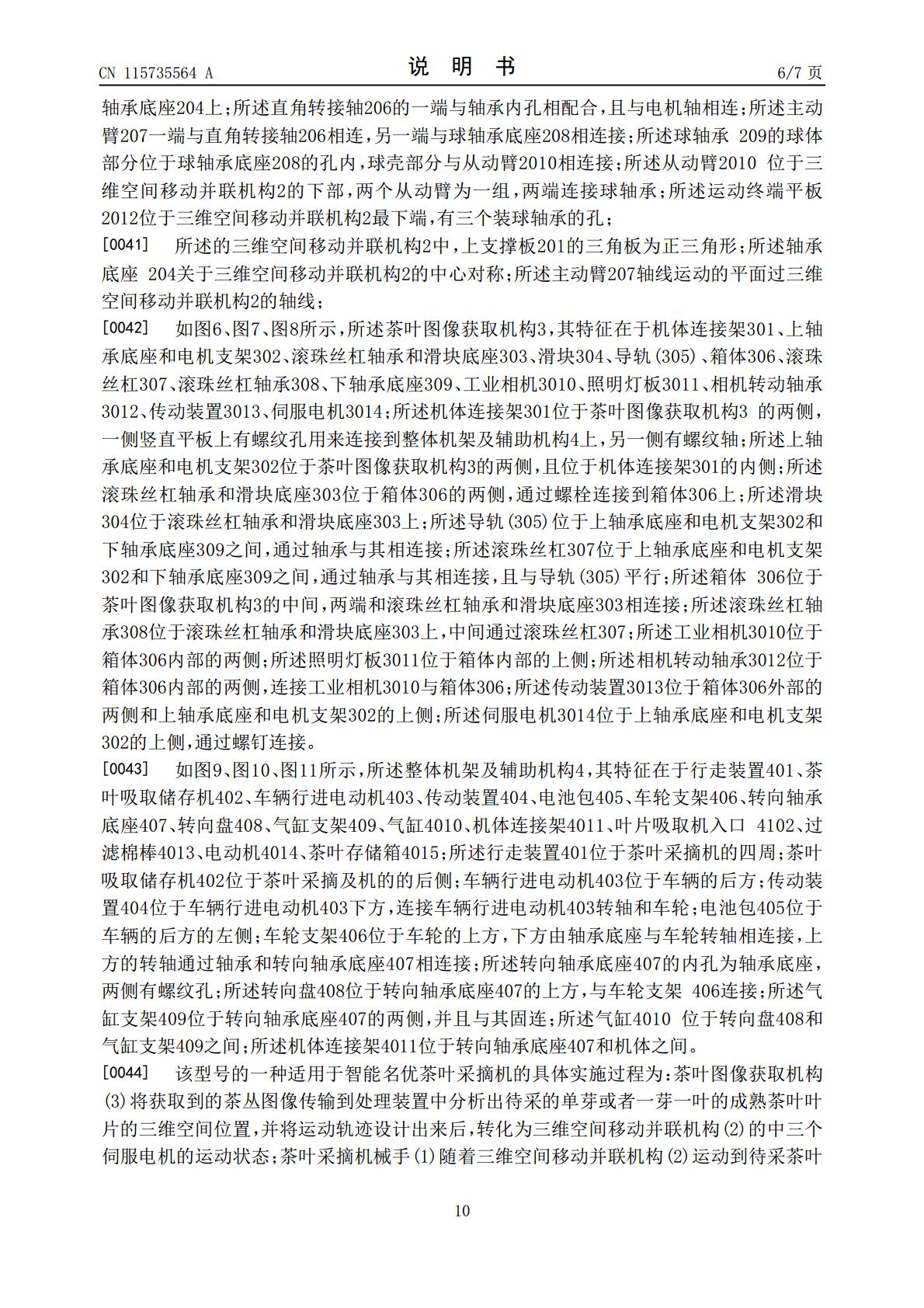
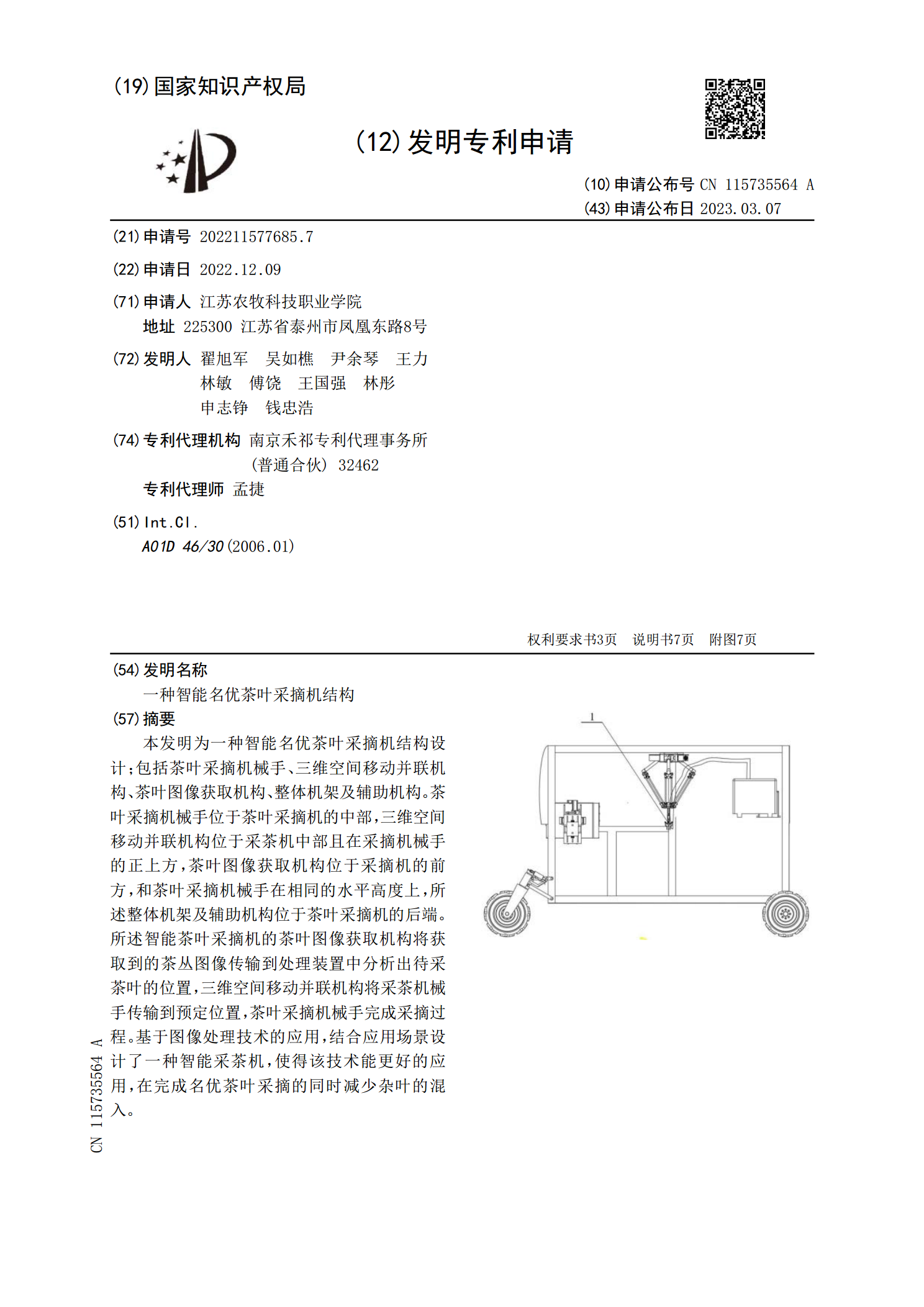
本发明为一种智能名优茶叶采摘机结构设计;包括茶叶采摘机械手、三维空间移动并联机构、茶叶图像获取机构、整体机架及辅助机构。茶叶采摘机械手位于茶叶采摘机的中部,三维空间移动并联机构位于采茶机中部且在采摘机械手的正上方,茶叶图像获取机构位于采摘机的前方,和茶叶采摘机械手在相同的水平高度上,所述整体机架及辅助机构位于茶叶采摘机的后端。所述智能茶叶采摘机的茶叶图像获取机构将获取到的茶丛图像传输到处理装置中分析出待采茶叶的位置,三维空间移动并联机构将采茶机械手传输到预定位置,茶叶采摘机械手完成采摘过程。基于图像处理技
一种环保智能茶叶采摘机及控制系统.pdf
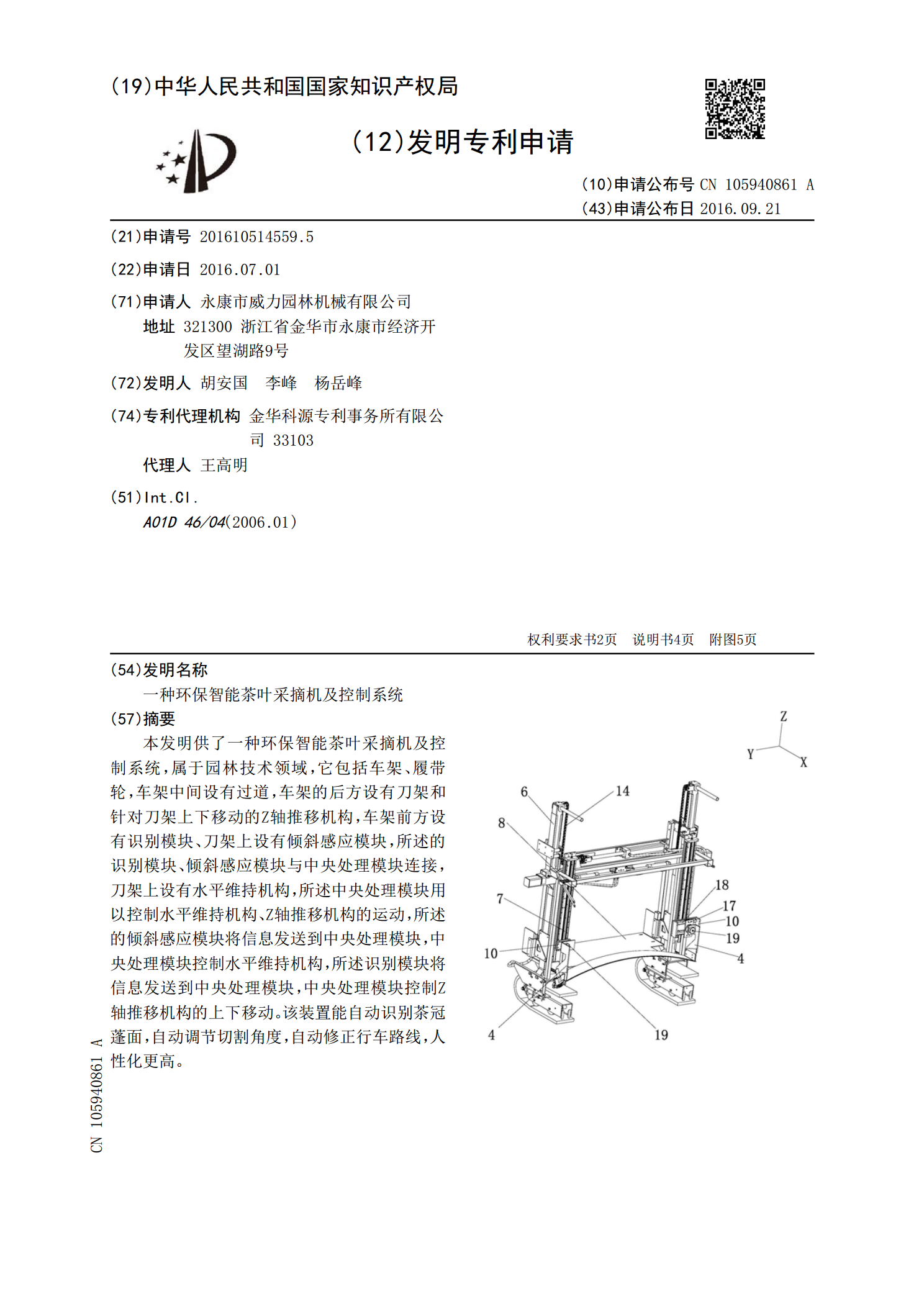
本发明供了一种环保智能茶叶采摘机及控制系统,属于园林技术领域,它包括车架、履带轮,车架中间设有过道,车架的后方设有刀架和针对刀架上下移动的Z轴推移机构,车架前方设有识别模块、刀架上设有倾斜感应模块,所述的识别模块、倾斜感应模块与中央处理模块连接,刀架上设有水平维持机构,所述中央处理模块用以控制水平维持机构、Z轴推移机构的运动,所述的倾斜感应模块将信息发送到中央处理模块,中央处理模块控制水平维持机构,所述识别模块将信息发送到中央处理模块,中央处理模块控制Z轴推移机构的上下移动。该装置能自动识别茶冠蓬面,自动
一种茶叶的自动采摘机.pdf
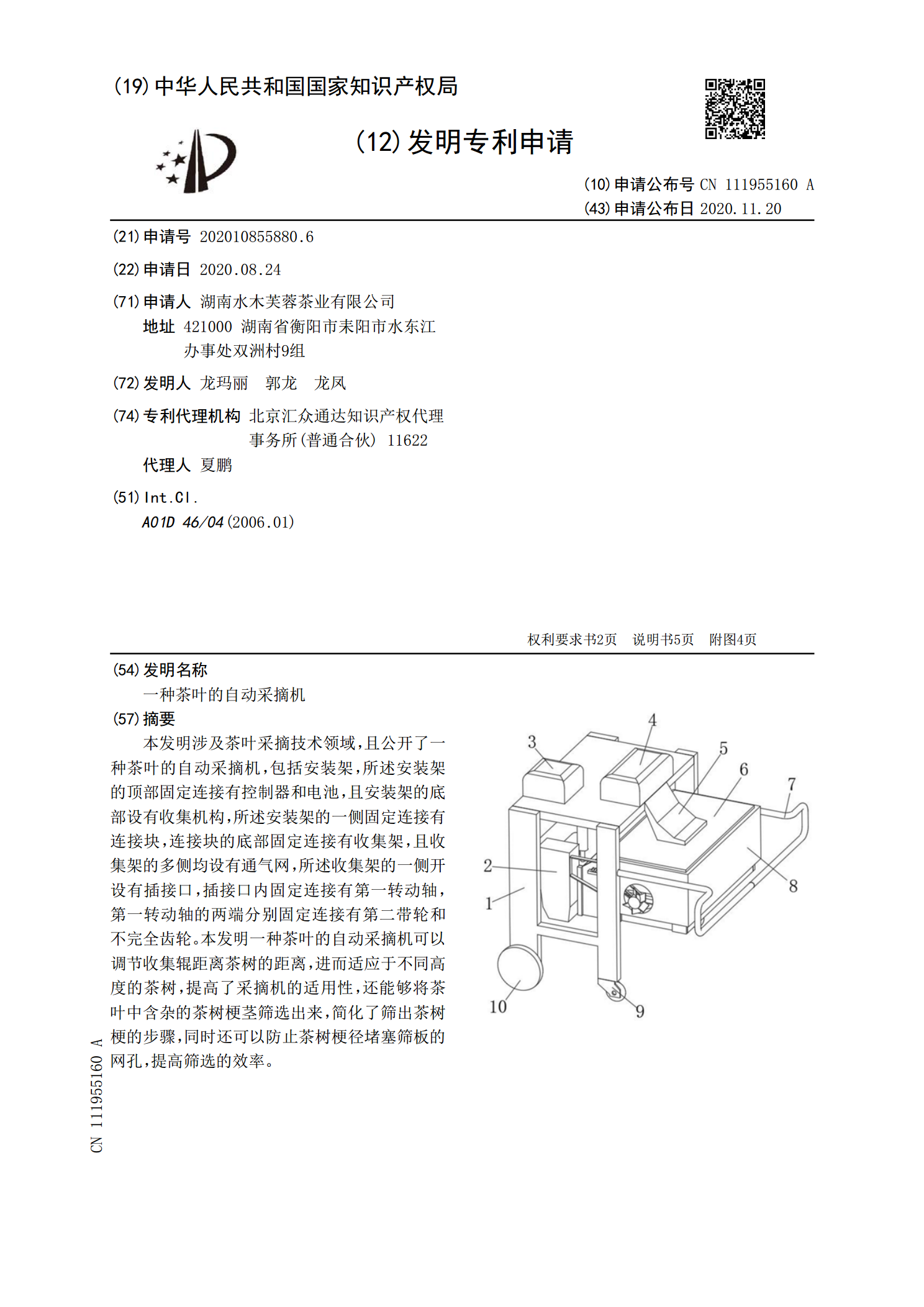
本发明涉及茶叶采摘技术领域,且公开了一种茶叶的自动采摘机,包括安装架,所述安装架的顶部固定连接有控制器和电池,且安装架的底部设有收集机构,所述安装架的一侧固定连接有连接块,连接块的底部固定连接有收集架,且收集架的多侧均设有通气网,所述收集架的一侧开设有插接口,插接口内固定连接有第一转动轴,第一转动轴的两端分别固定连接有第二带轮和不完全齿轮。本发明一种茶叶的自动采摘机可以调节收集辊距离茶树的距离,进而适应于不同高度的茶树,提高了采摘机的适用性,还能够将茶叶中含杂的茶树梗茎筛选出来,简化了筛出茶树梗的步骤,同
一种茶叶采摘机.pdf
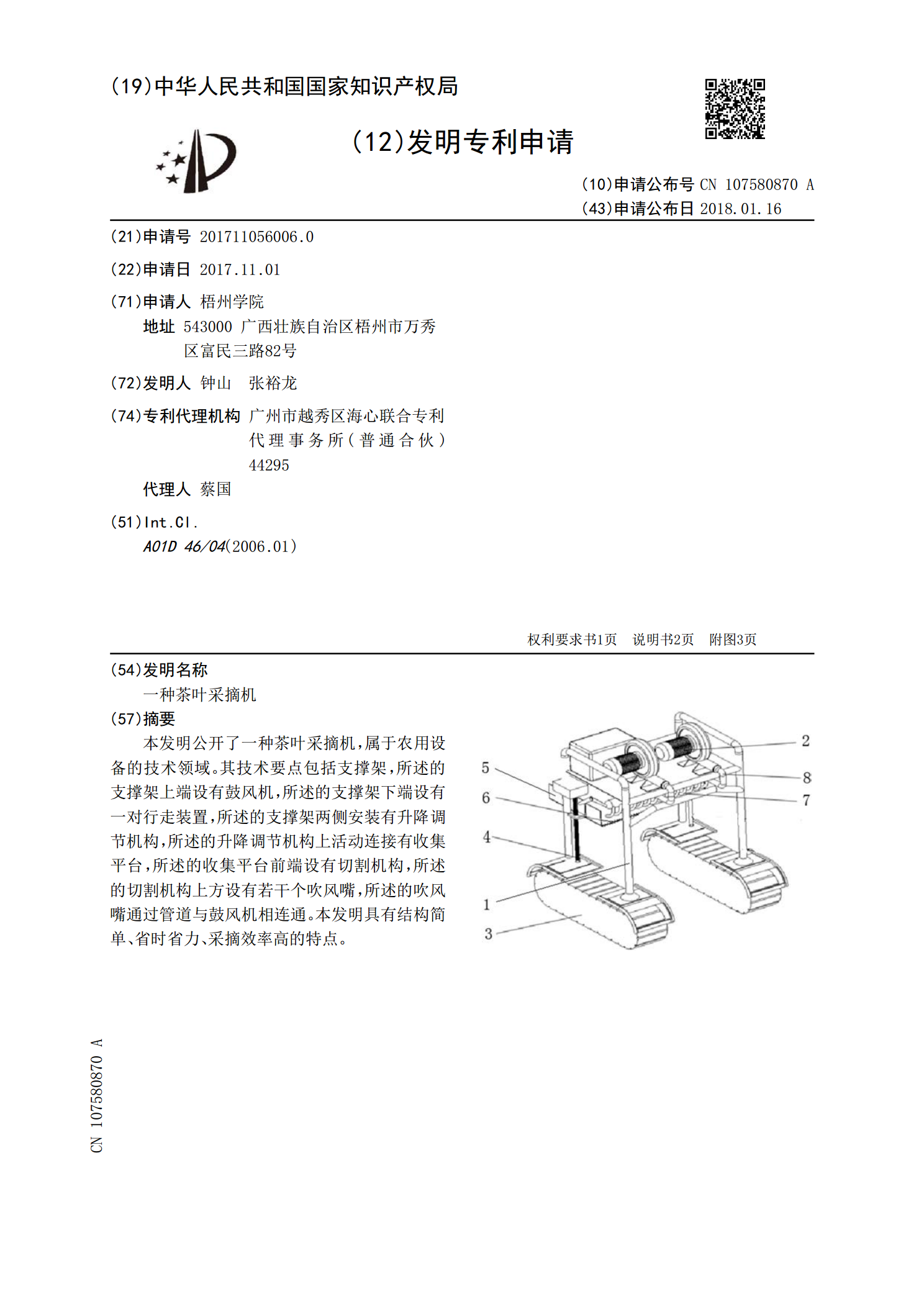
本发明公开了一种茶叶采摘机,属于农用设备的技术领域。其技术要点包括支撑架,所述的支撑架上端设有鼓风机,所述的支撑架下端设有一对行走装置,所述的支撑架两侧安装有升降调节机构,所述的升降调节机构上活动连接有收集平台,所述的收集平台前端设有切割机构,所述的切割机构上方设有若干个吹风嘴,所述的吹风嘴通过管道与鼓风机相连通。本发明具有结构简单、省时省力、采摘效率高的特点。
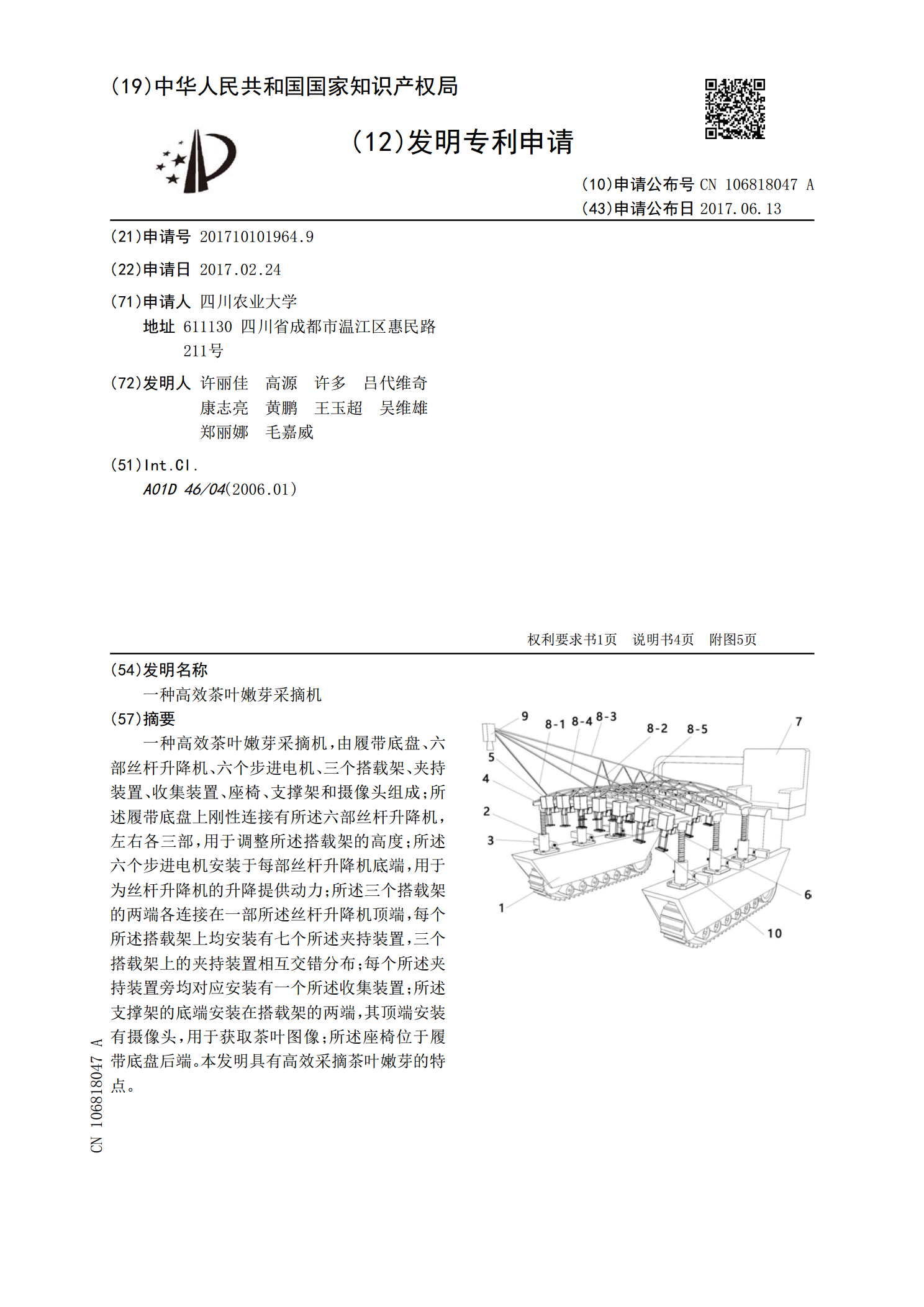
一种高效茶叶嫩芽采摘机.pdf
一种高效茶叶嫩芽采摘机,由履带底盘、六部丝杆升降机、六个步进电机、三个搭载架、夹持装置、收集装置、座椅、支撑架和摄像头组成;所述履带底盘上刚性连接有所述六部丝杆升降机,左右各三部,用于调整所述搭载架的高度;所述六个步进电机安装于每部丝杆升降机底端,用于为丝杆升降机的升降提供动力;所述三个搭载架的两端各连接在一部所述丝杆升降机顶端,每个所述搭载架上均安装有七个所述夹持装置,三个搭载架上的夹持装置相互交错分布;每个所述夹持装置旁均对应安装有一个所述收集装置;所述支撑架的底端安装在搭载架的两端,其顶端安装有摄像