
一种线阵相机的扫描图像校正方法及终端.pdf

书生****瑞梦

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种线阵相机的扫描图像校正方法及终端.pdf
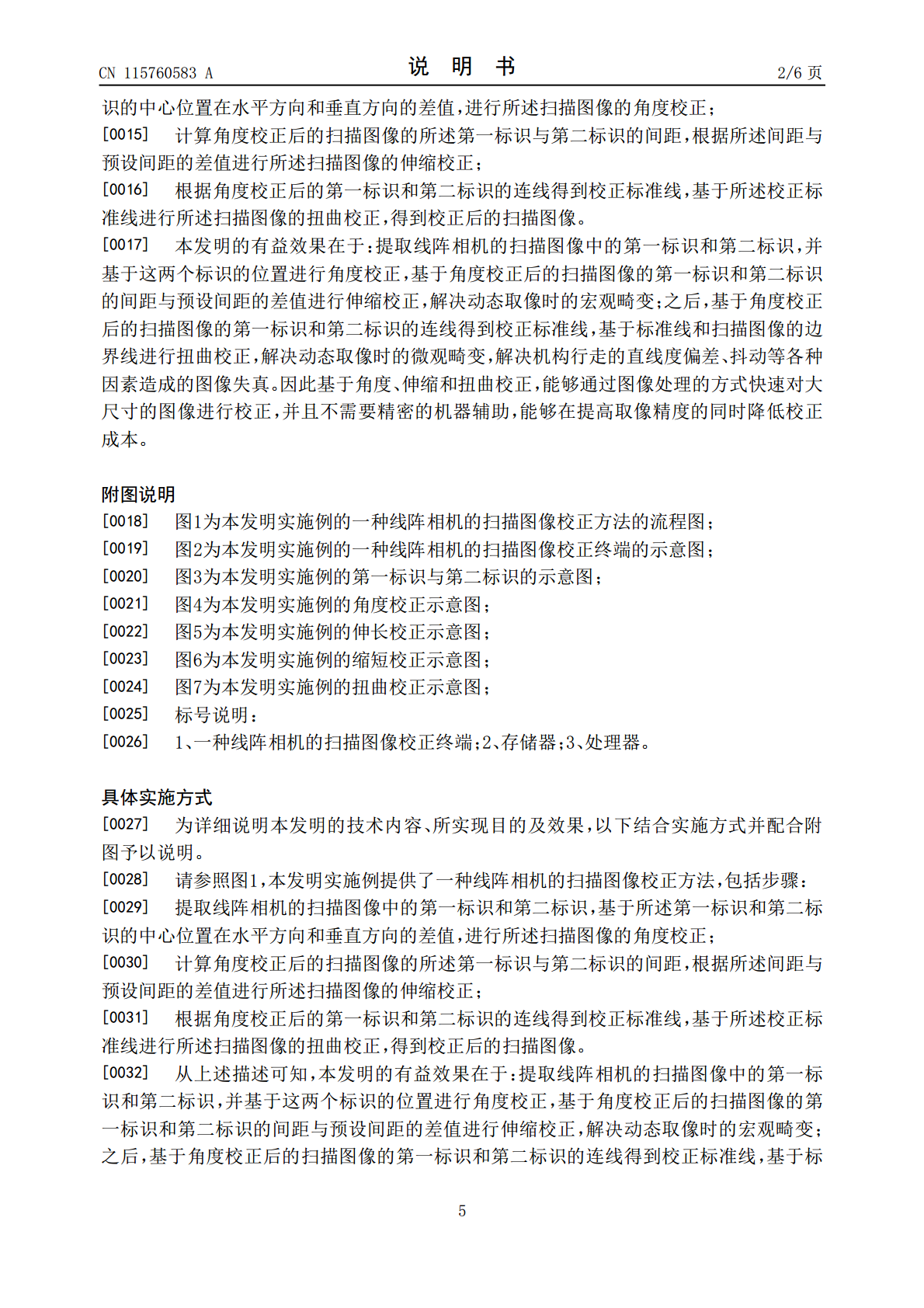
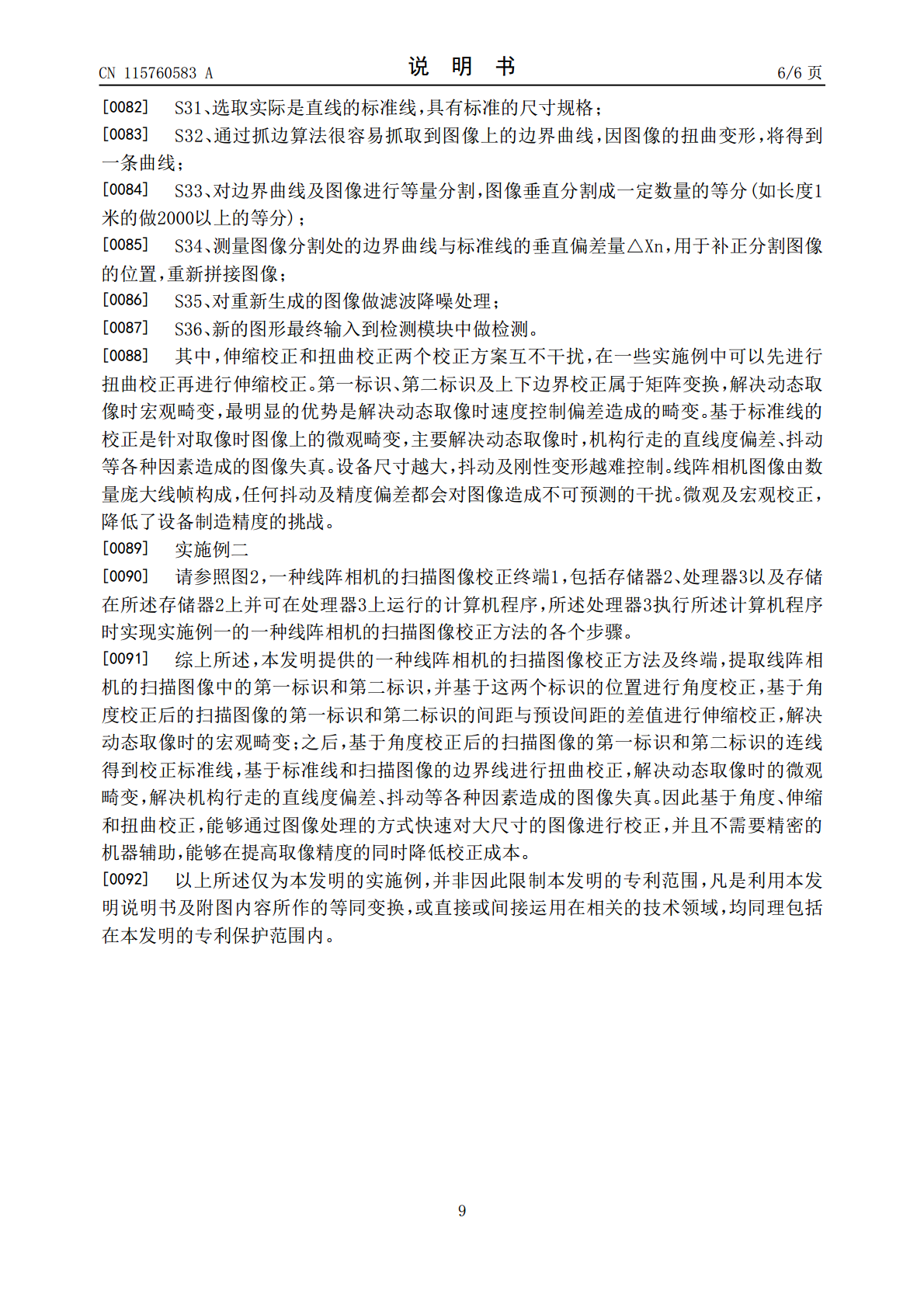
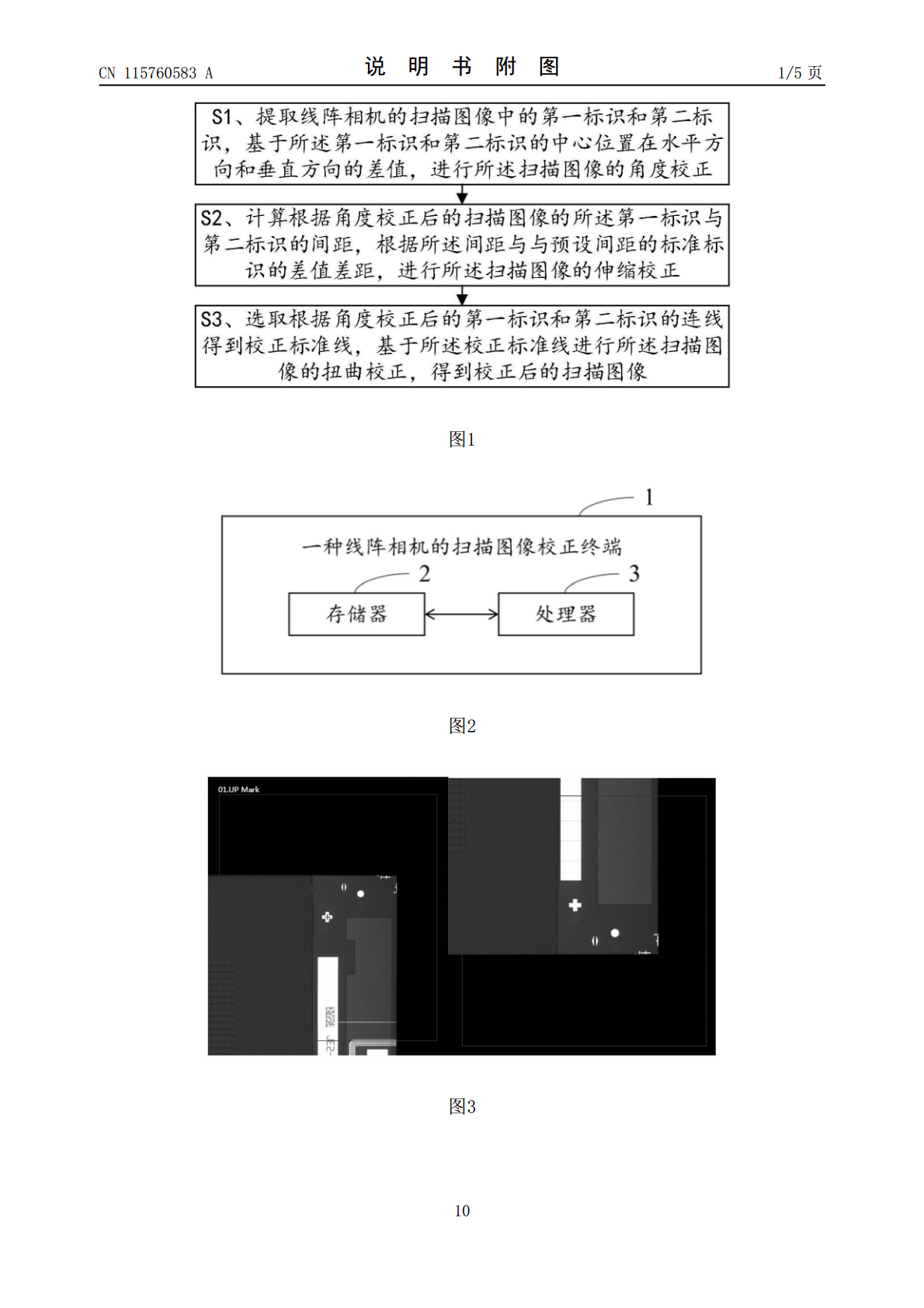
本发明公开了一种线阵相机的扫描图像校正方法及终端,提取线阵相机的扫描图像中的第一标识和第二标识,并基于这两个标识的位置进行角度校正,基于角度校正后的扫描图像的第一标识和第二标识的间距与预设间距的差值进行伸缩校正,解决动态取像时的宏观畸变;之后,基于角度校正后的扫描图像的第一标识和第二标识的连线得到校正标准线,基于标准线和扫描图像的边界线进行扭曲校正,解决动态取像时的微观畸变,解决机构行走的直线度偏差、抖动等各种因素造成的图像失真。因此基于角度、伸缩和扭曲校正,能够通过图像处理的方式快速对大尺寸的图像进行校
基于线阵相机的路面图像灰度校正方法.pdf
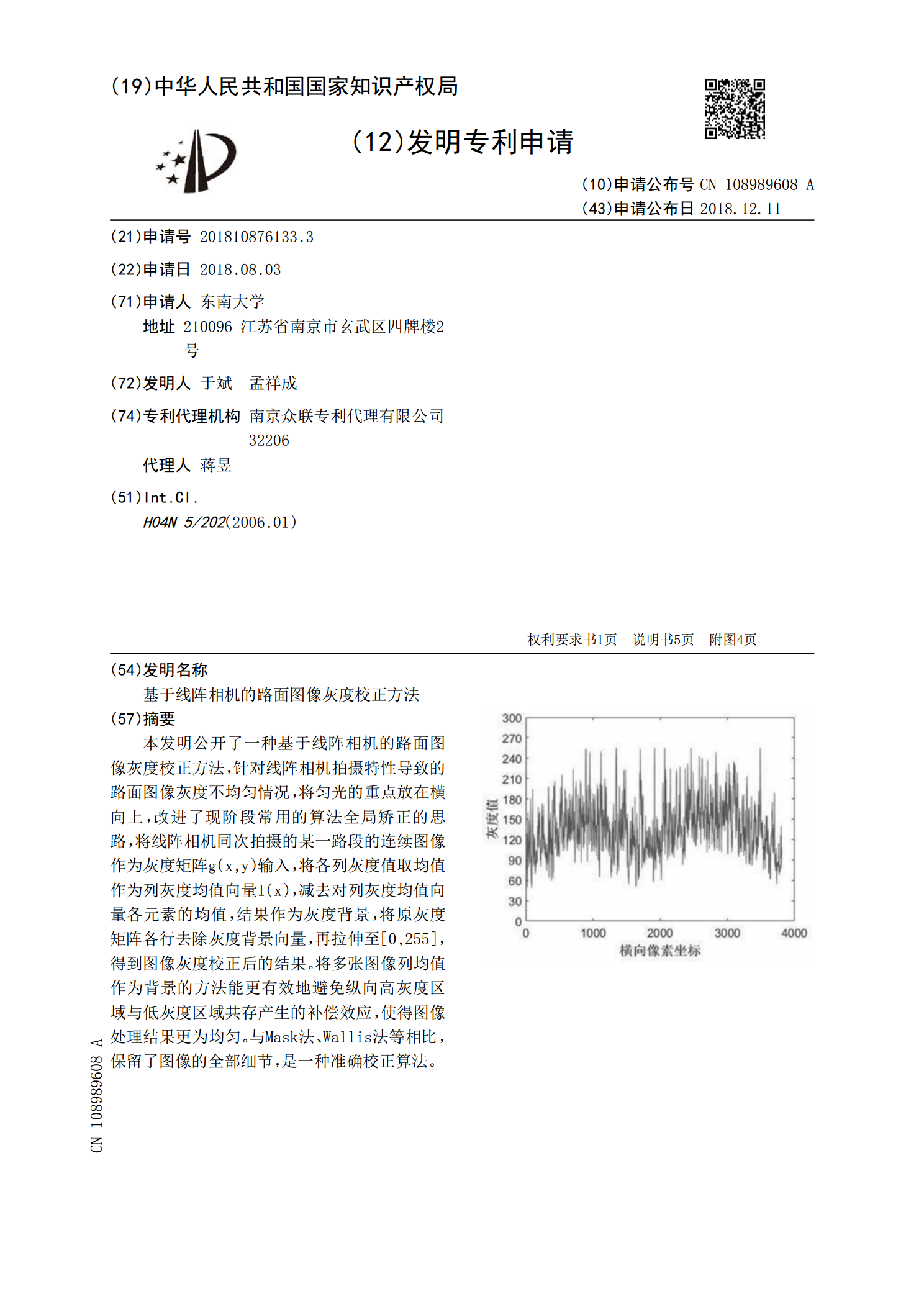
本发明公开了一种基于线阵相机的路面图像灰度校正方法,针对线阵相机拍摄特性导致的路面图像灰度不均匀情况,将匀光的重点放在横向上,改进了现阶段常用的算法全局矫正的思路,将线阵相机同次拍摄的某一路段的连续图像作为灰度矩阵g(x,y)输入,将各列灰度值取均值作为列灰度均值向量I(x),减去对列灰度均值向量各元素的均值,结果作为灰度背景,将原灰度矩阵各行去除灰度背景向量,再拉伸至[0,255],得到图像灰度校正后的结果。将多张图像列均值作为背景的方法能更有效地避免纵向高灰度区域与低灰度区域共存产生的补偿效应,使得图
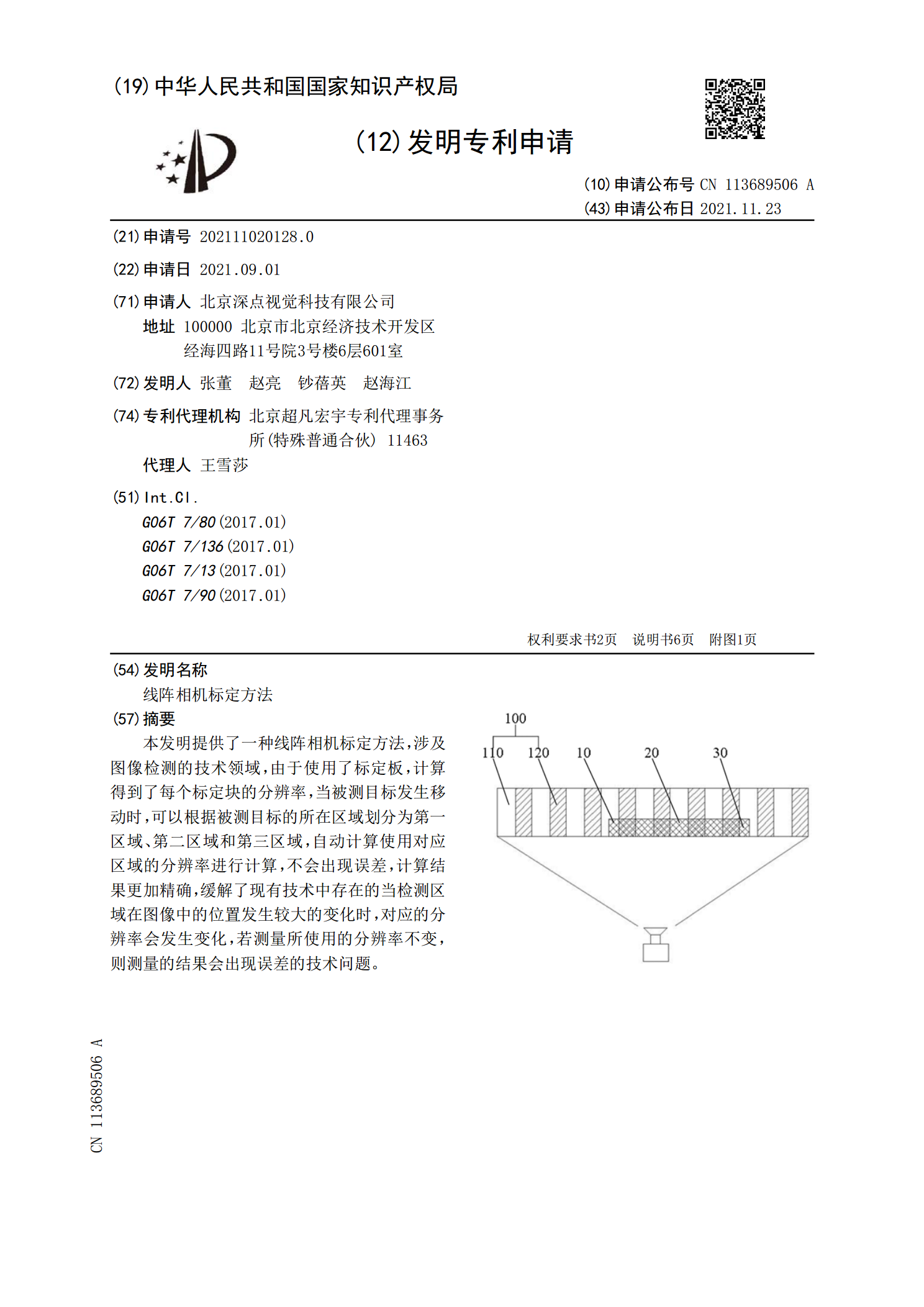
线阵相机标定方法.pdf
本发明提供了一种线阵相机标定方法,涉及图像检测的技术领域,由于使用了标定板,计算得到了每个标定块的分辨率,当被测目标发生移动时,可以根据被测目标的所在区域划分为第一区域、第二区域和第三区域,自动计算使用对应区域的分辨率进行计算,不会出现误差,计算结果更加精确,缓解了现有技术中存在的当检测区域在图像中的位置发生较大的变化时,对应的分辨率会发生变化,若测量所使用的分辨率不变,则测量的结果会出现误差的技术问题。
长波线阵红外相机星上非均匀性实时校正方法.pdf
长波线阵红外相机星上非均匀性实时校正方法,首先依次发送低温、高温定标指令,控制黑体运动使红外相机与黑体中央区域对准,待温度稳定后分别将图像数据存储,然后计算每个像元均值数据及所有像元的均值,进而得到高低温均值数据的差值和差值的平均值,利用差值和差值平均值判断盲元点,最后对盲元点用行均值进行盲元替代,并计算盲元替代后的低温、高温、高低温差值图像数据的均值,进而得到校正系数,并对探测器输出的原始图像进行校正。本发明非均匀性实时校正方法与现有技术相比,减少通过地面定标进行非均匀性校正而导致的校正偏差,改善了红外
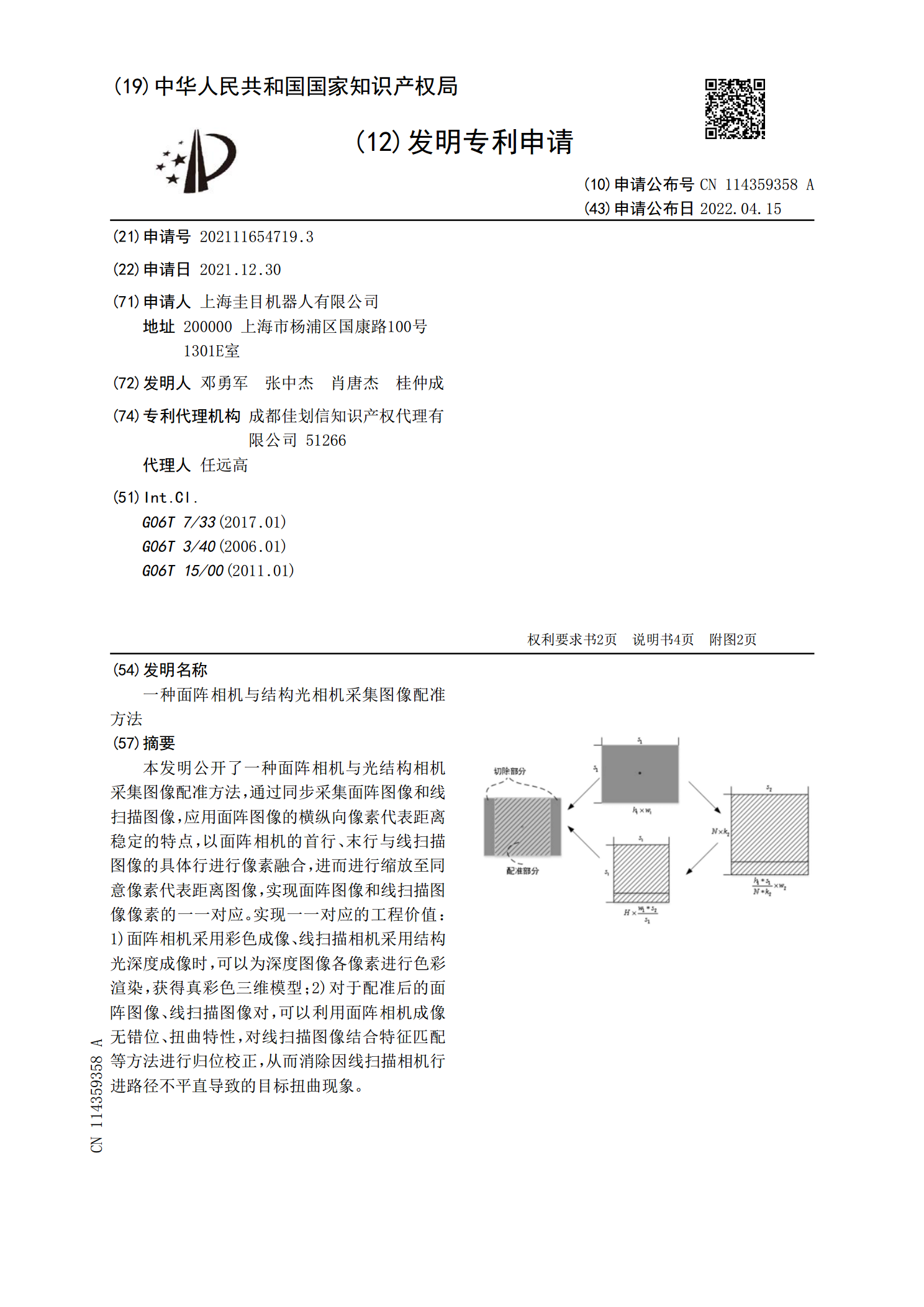
一种面阵相机与结构光相机采集图像配准方法.pdf
本发明公开了一种面阵相机与光结构相机采集图像配准方法,通过同步采集面阵图像和线扫描图像,应用面阵图像的横纵向像素代表距离稳定的特点,以面阵相机的首行、末行与线扫描图像的具体行进行像素融合,进而进行缩放至同意像素代表距离图像,实现面阵图像和线扫描图像像素的一一对应。实现一一对应的工程价值:1)面阵相机采用彩色成像、线扫描相机采用结构光深度成像时,可以为深度图像各像素进行色彩渲染,获得真彩色三维模型;2)对于配准后的面阵图像、线扫描图像对,可以利用面阵相机成像无错位、扭曲特性,对线扫描图像结合特征匹配等方法进