
一种基于Pose-Transformer网络的动物行为识别方法.pdf

贤惠****66

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于Pose-Transformer网络的动物行为识别方法.pdf
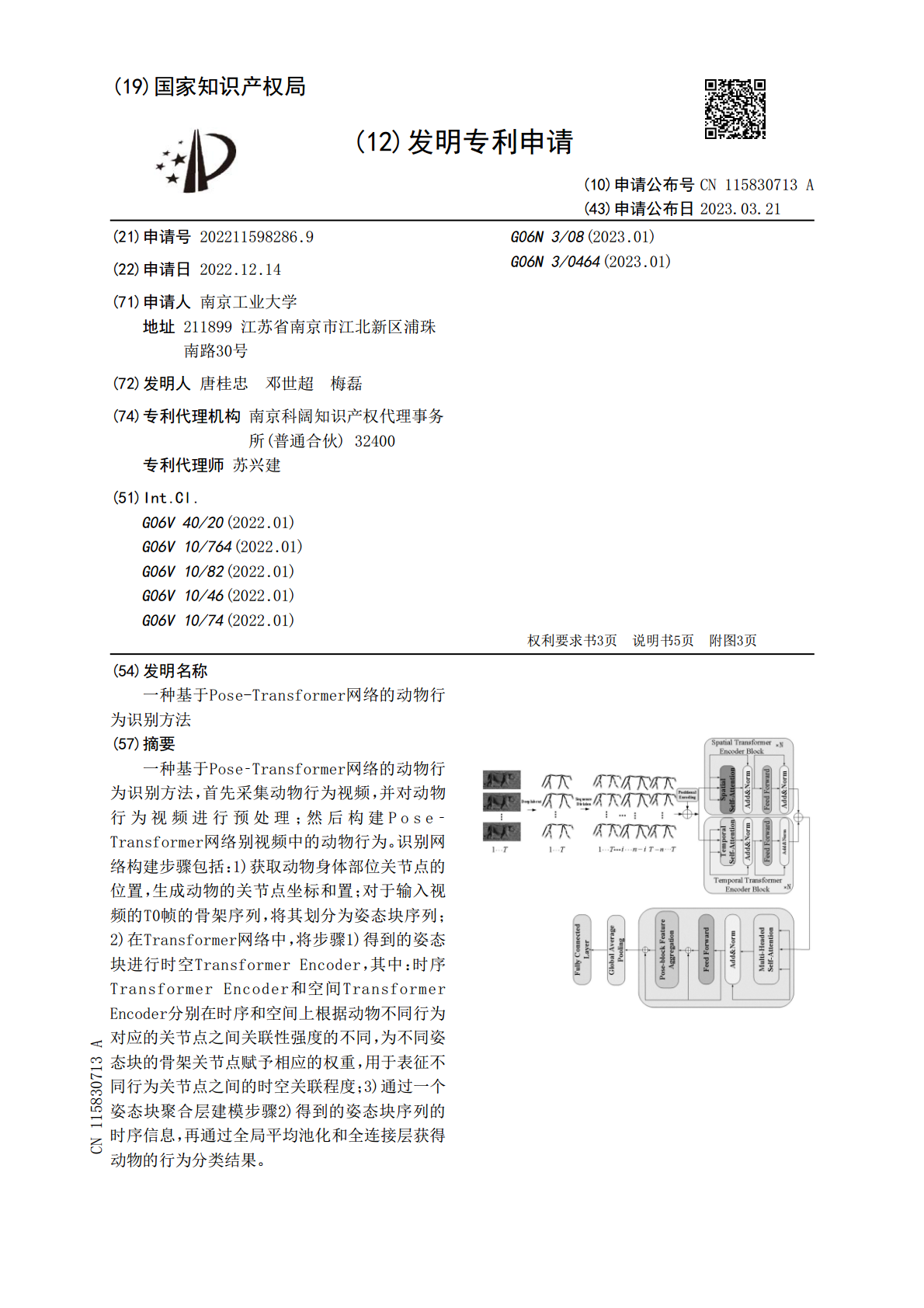
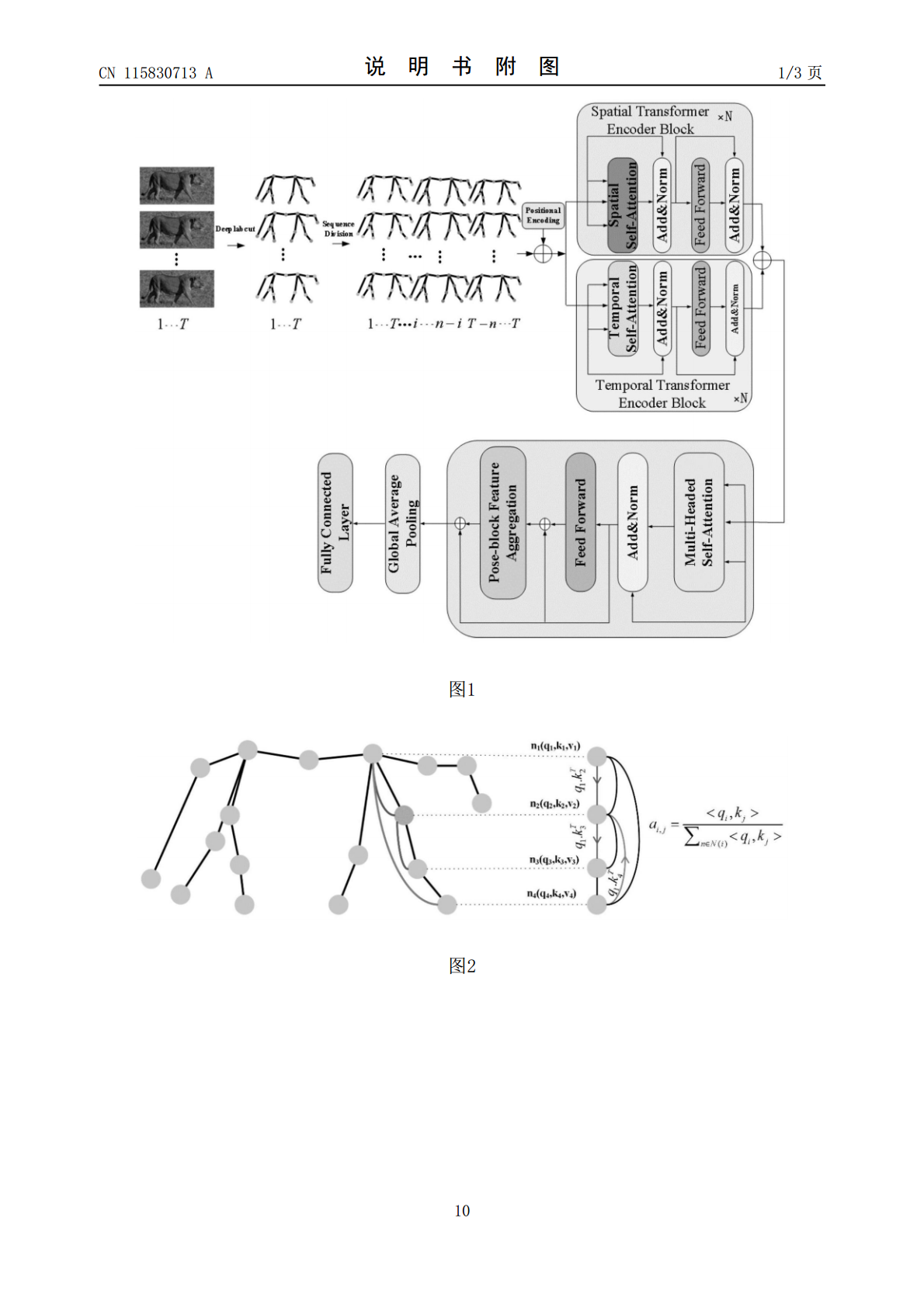
一种基于Pose‑Transformer网络的动物行为识别方法,首先采集动物行为视频,并对动物行为视频进行预处理;然后构建Pose‑Transformer网络别视频中的动物行为。识别网络构建步骤包括:1)获取动物身体部位关节点的位置,生成动物的关节点坐标和置;对于输入视频的T0帧的骨架序列,将其划分为姿态块序列;2)在Transformer网络中,将步骤1)得到的姿态块进行时空TransformerEncoder,其中:时序TransformerEncoder和空间TransformerEncode
一种基于神经网络的湖羊行为实时识别方法.pdf
本发明公开了一种基于神经网络的湖羊行为实时识别方法,包括:采集湖羊行为视频,以建立湖羊行为数据集;对所述湖羊行为数据集进行数据预处理;建立基于注意力机制的TSM神经网络模型,并利用预处理后的数据进行训练;将所述基于注意力机制的TSM神经网络模型搭载到AI边缘计算设备上;利用所述AI边缘计算设备的摄像头实时采集湖羊状态,利用所述基于注意力机制的TSM神经网络模型识别湖羊行为并输出识别结果;本发明利用时移模块增强前后帧之间的联系,丰富了时间维度上的信息;利用注意力模块增强了对湖羊信息的感知;在模型复杂度较低的
一种基于轻量双流网络的行为识别方法.pdf
本发明公开了一种基于轻量双流网络的行为识别方法,属于图像处理技术领域。其具体步骤为:S1行为识别实验数据集制作;S2基于所提出轻量双流网络框架,对行为识别数据集进行网络模型训练;S3采用自蒸馏技术,提取在标注标签外的软信息,用于进一步提高模型的识别准确率,使用自我迭代,自我学习的方法,提高训练速度以及识别准确率;S4通过轻量双流网络对输入的视频进行行为识别。本发明是一种基于轻量双流网络的行为识别方法,利用ActionNet模拟生成光流信息,大大提高了计算速度,使得行为识别的实时性和准确率得以提高。

一种基于图卷积神经网络的人体行为识别方法.pdf
本发明公开了一种基于图卷积神经网络的人体行为识别方法,本发明使用图卷积神经网络进行人体行为识别技术,从而更好的捕捉骨骼点之间的显式关系;在具体的图卷积操作中,使用行为特异图卷积模块,使得模型也可以更好的捕捉骨骼点之间的隐式关系,以捕捉其中的重要信息;为了捕捉时序信息,本技术采用门控时序一维卷积操作,过滤掉冗余及无关信息,保留其中的有用信息,以更好的建模动作的时序信息;在图卷积操作和一维卷积操作之后,均加入通道注意力模块,以建立通道维度的卷积,为不同的通道分配不同的权值,实现通道维度的注意力机制;通过行为门

一种基于图卷积和胶囊神经网络的行为识别方法.pdf
本发明提出了一种基于图卷积和胶囊神经网络的行为识别方法。本发明通过人工标记得到每帧人体连续动作图像中人体关节点的空间坐标,进一步构建人体关节点的空间坐标向量;通过多层感知机将空间坐标向量映射为高维度特征向量,并结合动作关联原则构建关节点邻接矩阵;根据空间坐标构建出关节点的速度空间向量,进一步构建出关节点的加速度空间向量;将卷积神经网络用于提取特征,将胶囊神经网络用于动作分类,通过卷积神经网络、胶囊神经网络的串联构建胶囊卷积神经网络;将训练集重复多代训练得到训练好的胶囊卷积神经网络。本发明符合实际运动的特点