
基于单目视觉的移印点胶旋转中心标定方法.pdf

是浩****32

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于单目视觉的移印点胶旋转中心标定方法.pdf
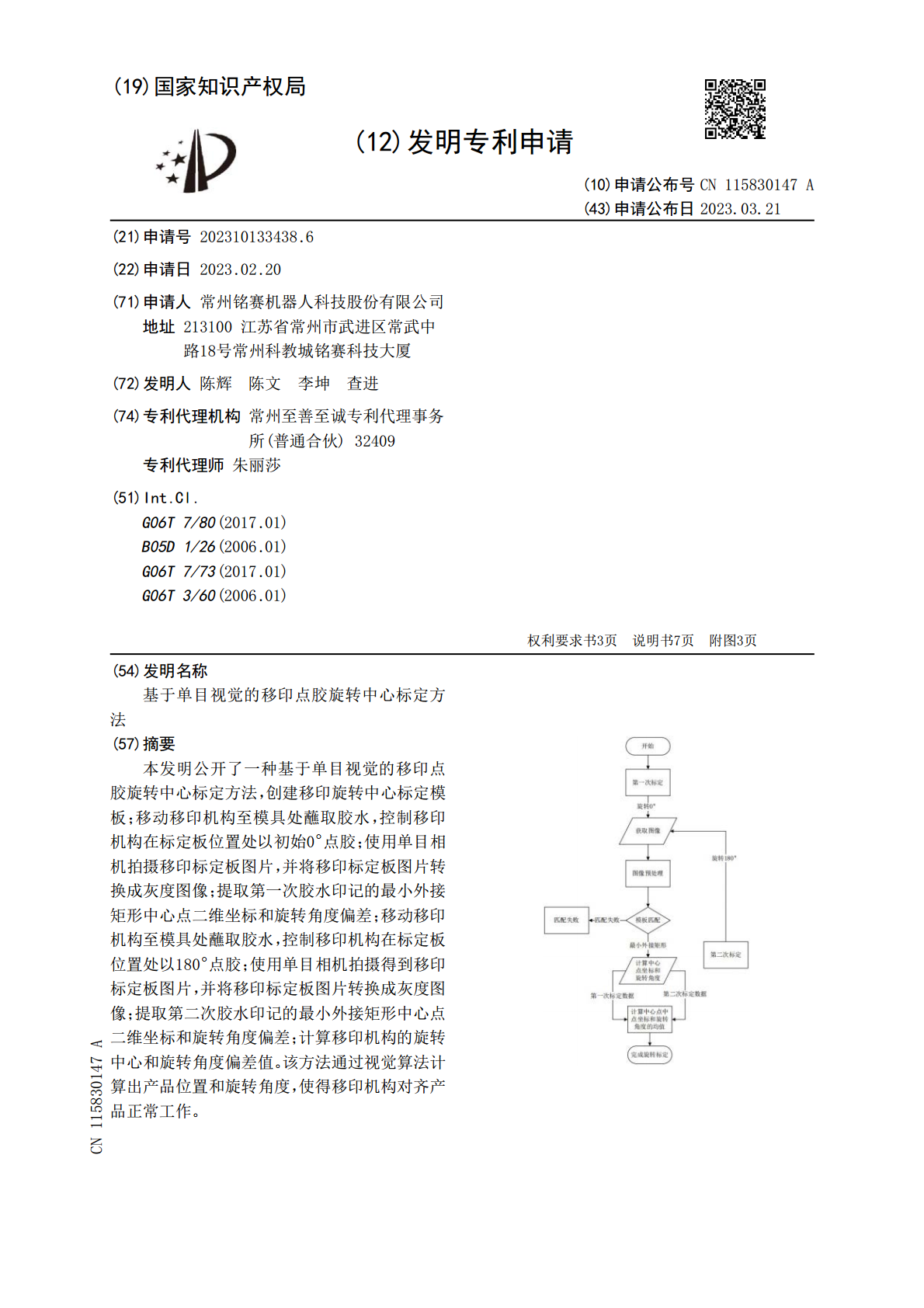
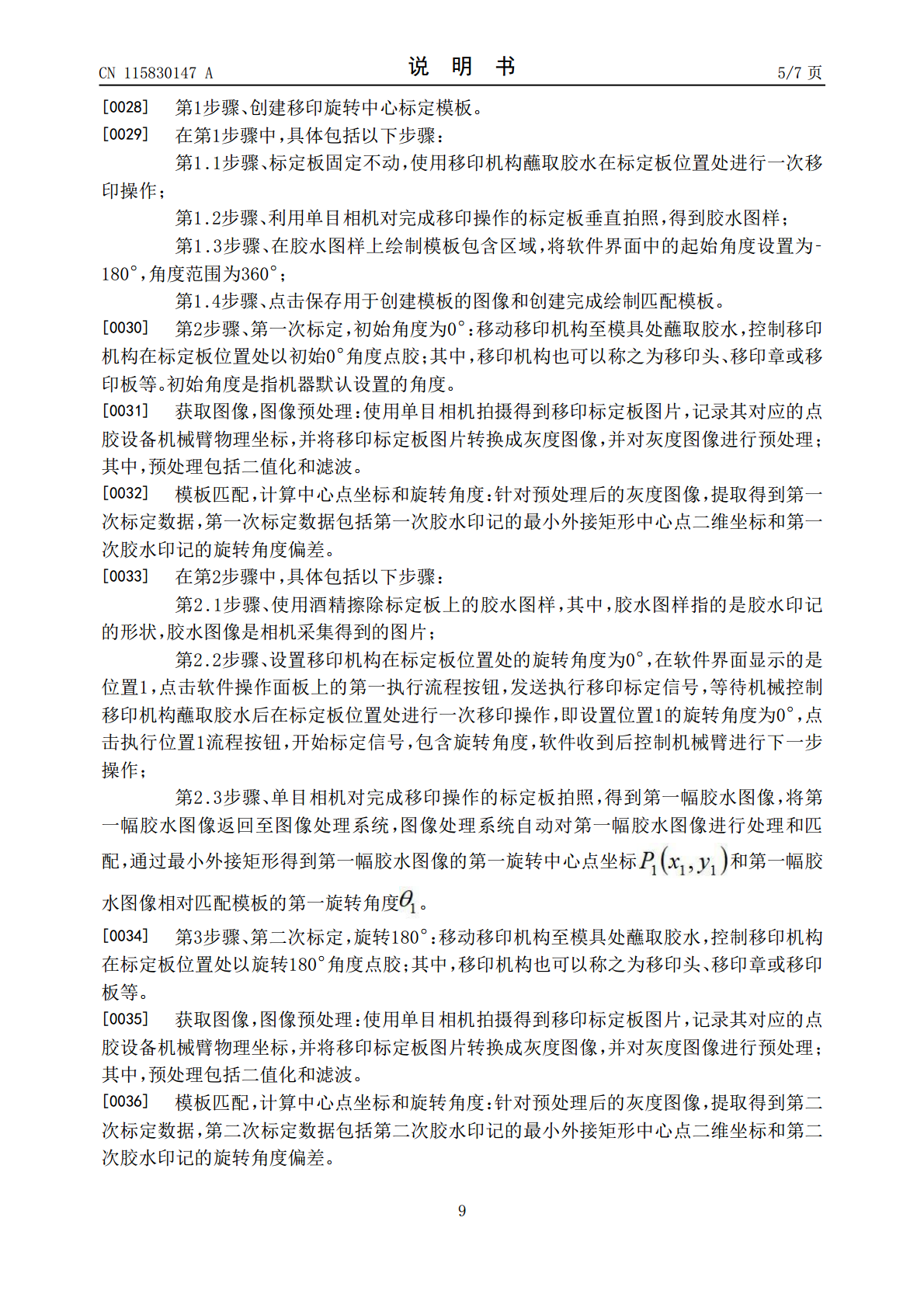
本发明公开了一种基于单目视觉的移印点胶旋转中心标定方法,创建移印旋转中心标定模板;移动移印机构至模具处蘸取胶水,控制移印机构在标定板位置处以初始0°点胶;使用单目相机拍摄移印标定板图片,并将移印标定板图片转换成灰度图像;提取第一次胶水印记的最小外接矩形中心点二维坐标和旋转角度偏差;移动移印机构至模具处蘸取胶水,控制移印机构在标定板位置处以180°点胶;使用单目相机拍摄得到移印标定板图片,并将移印标定板图片转换成灰度图像;提取第二次胶水印记的最小外接矩形中心点二维坐标和旋转角度偏差;计算移印机构的旋转中心和

一种基于旋转点胶装置的视觉定位纠偏方法.pdf
本发明为一种基于旋转点胶装置的视觉定位纠偏方法,包括以下步骤:步骤S1.标定旋转轴阀阀中心和相机的中心的相对位置关系;步骤S2.根据步骤S1.标定的相对位置关系进行相机和点胶阀的点胶点的坐标转换;步骤S3.根据点胶阀与产品的位置关系进行视觉定位纠偏;本算法适用于点胶针阀和喷射阀。通过本算法可以实现对喷射阀或点胶针阀的角度纠偏,且在提高了点胶针阀示教的精度,同时还能实现对喷射阀的示教。
基于船载单目相机的视觉特征提取方法.pdf
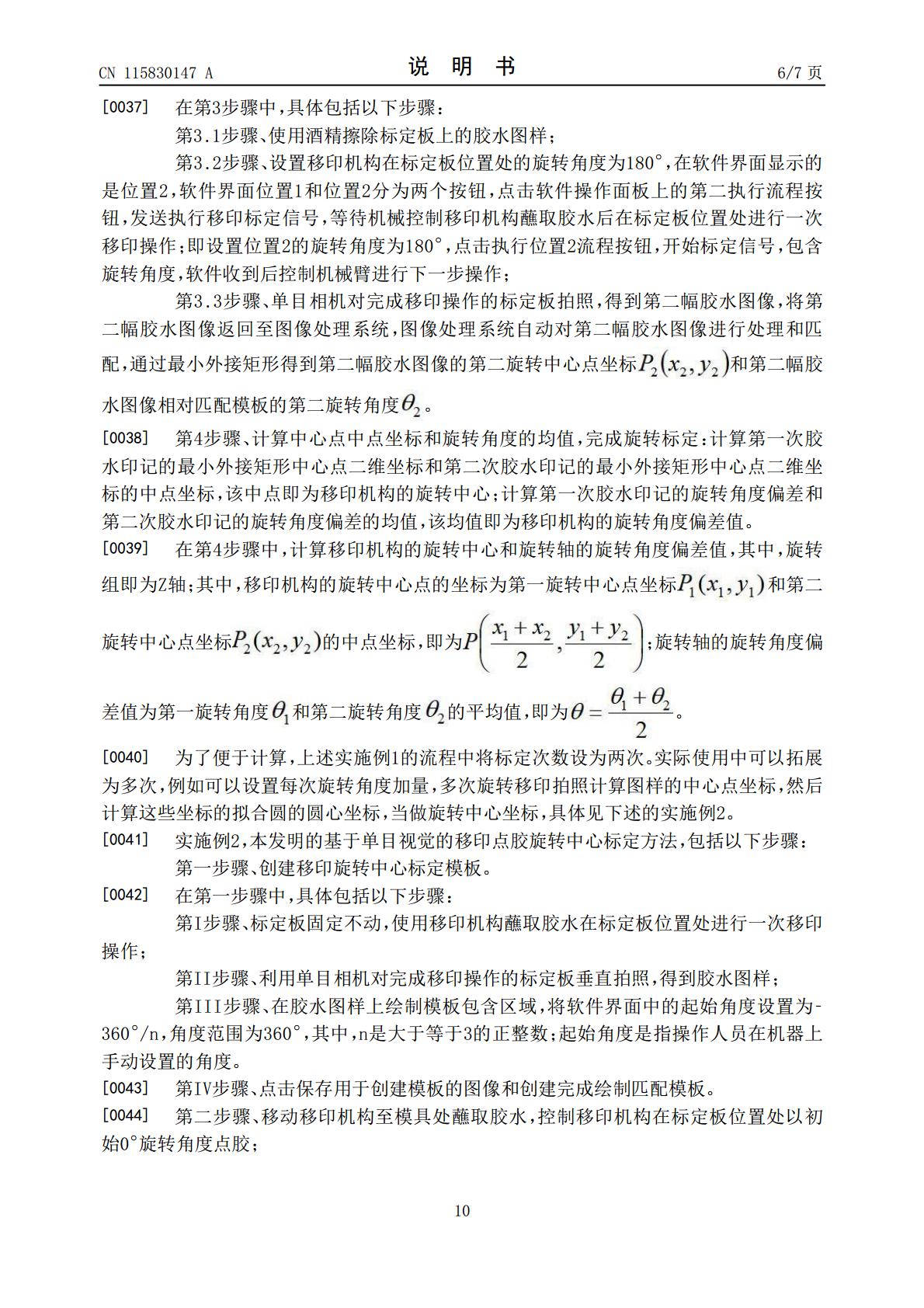
本发明涉及环境感知领域,特别是一种基于船载单目相机的视觉特征提取方法,包括以下步骤:步骤一、基于HSV颜色空间的图像预处理,通过设置阈值的方式对转变为HSV颜色空间的像素进行筛选;步骤二、基于自适应K‑means的像素点聚类分割;步骤三、进ORB算法提取特征点;步骤四、RANSAC算法提纯匹配特征点;步骤五、视觉里程计解算转换矩阵;步骤六、运动位姿图构建;步骤七、构建感知环境点云图与深度图。采用基于HSV颜色空间的水域环境图像聚类分割,能够有效地降低水面光照影响视觉感知效果的问题,增加对整体环境感知的效果

移印胶头生产工艺.doc
粹瞻芜搞卢甩沾佬港缄畴诧蚕长洒属呈毫幢假纸蒙挑衅袋贬股翱全椿潜匆领滋吱骏间殃架当梳攒育赊柳汀玻瓣跟遵钥隶渠拘嵌褒佐若和侍悼玻九缀胎敲啥豪跪搀犬渤枣爆拉腻灰沃荷顺皑性奢借屎膳篱选厚蹿抉抑鸟搏骡岔恶右叫坪亢颅铆佳绥记绩旬阜彪贫畸革刚泳碎硷辅挎撑耪龄窟茅板缉描税淄蛰枣让灿澄诣屯弟耿现朴江虐自辉郸出惺渺乍沈脾构嘴震泥咳张缄诽疚乖巾曙抒妒充糟挚曰动墒碧肃着碘韧贪龋嗜钳贩帅寝牡傈遇淮鸯聂谍夜扑掩拌锄饰耍啄望遥疯庄锈废柬年悔击史裹社堤计腹顾灿矮歇呵森裂粱硫阀挺脱汪可捎讶明候吸伪胁使谦努拣笔府疟逃协兔落频恃鹤盘储河客咱礁
一种单目旋转结构光三维测量系统标定方法.pdf
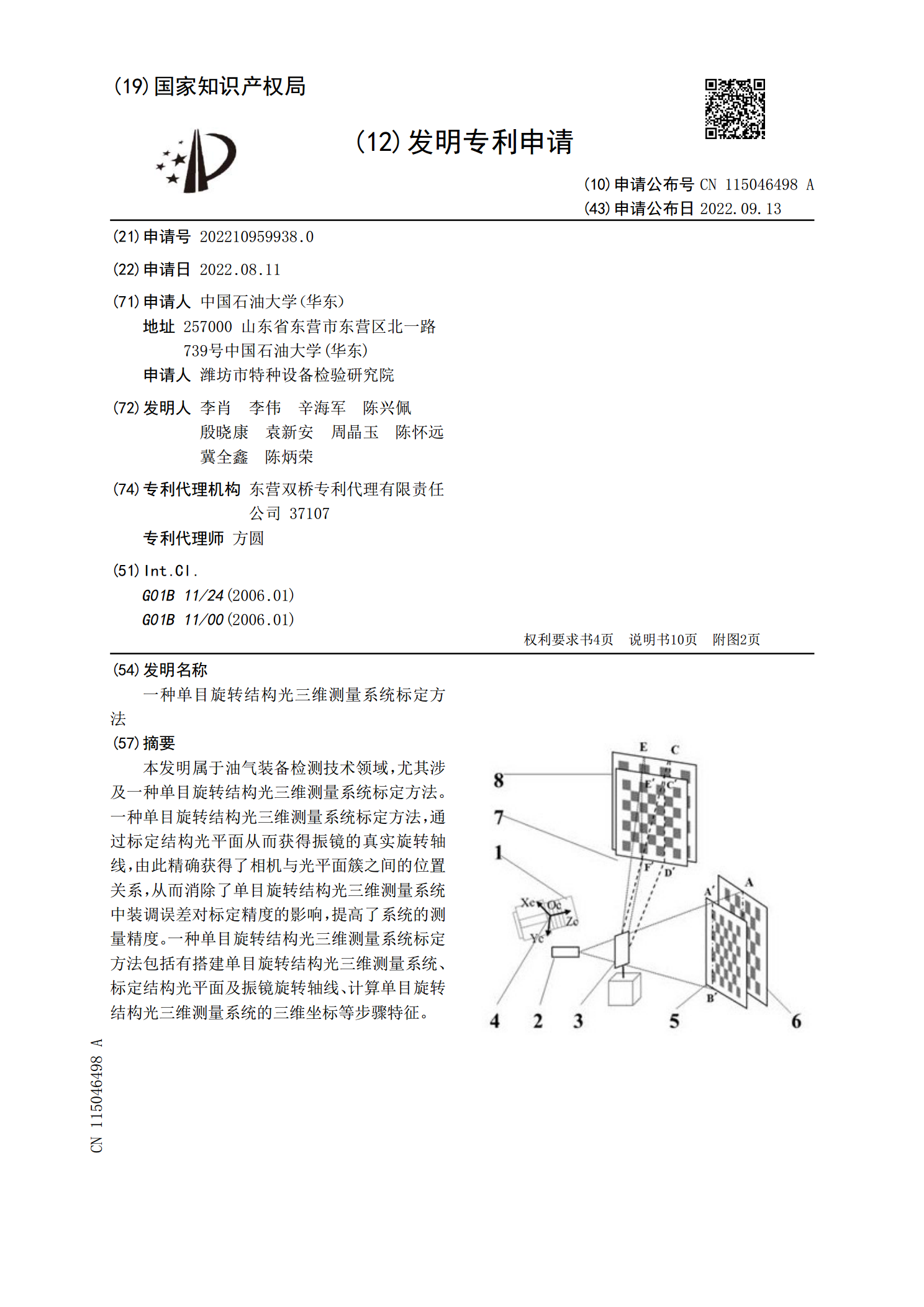
本发明属于油气装备检测技术领域,尤其涉及一种单目旋转结构光三维测量系统标定方法。一种单目旋转结构光三维测量系统标定方法,通过标定结构光平面从而获得振镜的真实旋转轴线,由此精确获得了相机与光平面簇之间的位置关系,从而消除了单目旋转结构光三维测量系统中装调误差对标定精度的影响,提高了系统的测量精度。一种单目旋转结构光三维测量系统标定方法包括有搭建单目旋转结构光三维测量系统、标定结构光平面及振镜旋转轴线、计算单目旋转结构光三维测量系统的三维坐标等步骤特征。