
基于量子蜘蛛群演化机制的平面天线阵列稀疏方法.pdf

森林****io


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于量子蜘蛛群演化机制的平面天线阵列稀疏方法.pdf
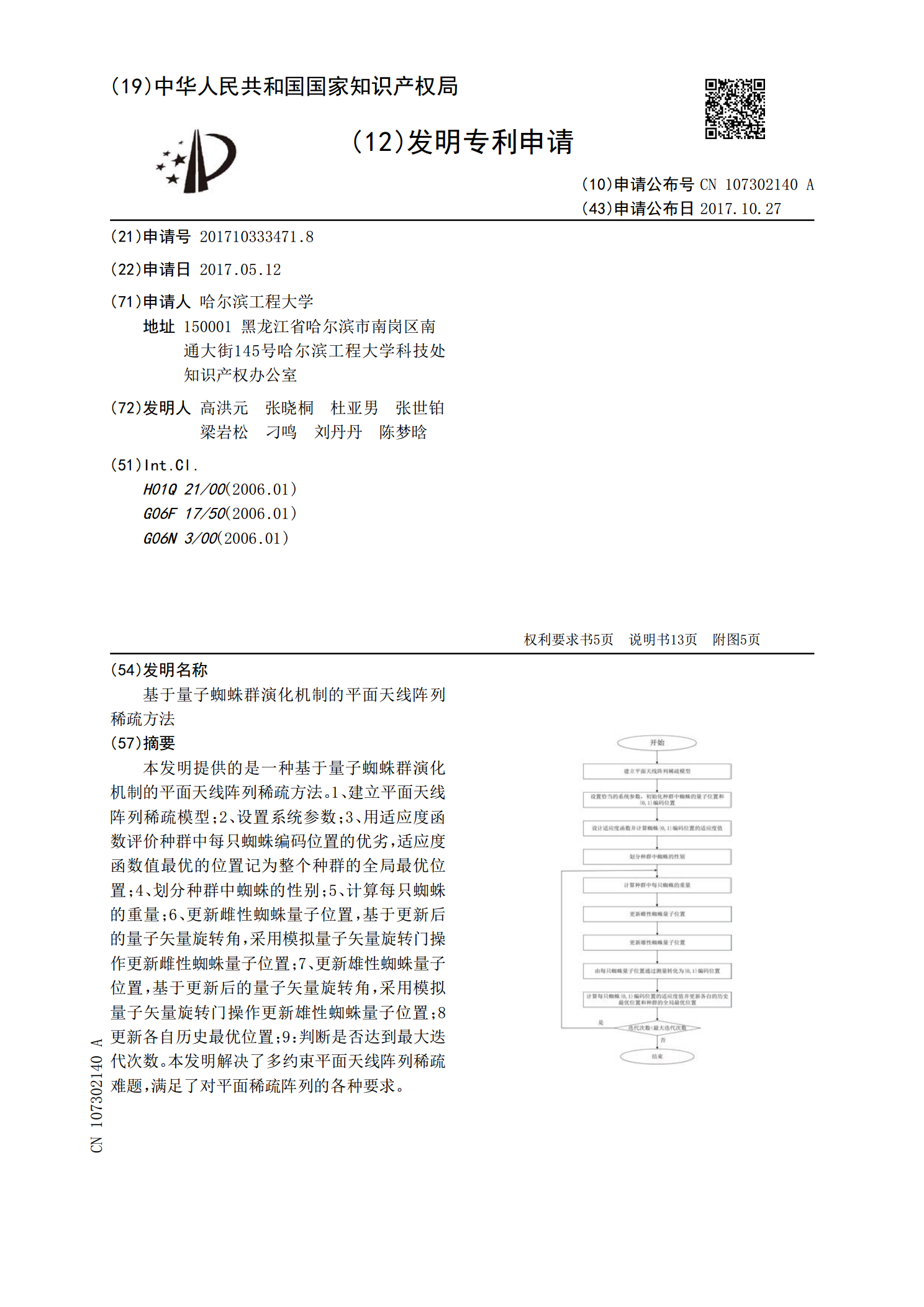
本发明提供的是一种基于量子蜘蛛群演化机制的平面天线阵列稀疏方法。1、建立平面天线阵列稀疏模型;2、设置系统参数;3、用适应度函数评价种群中每只蜘蛛编码位置的优劣,适应度函数值最优的位置记为整个种群的全局最优位置;4、划分种群中蜘蛛的性别;5、计算每只蜘蛛的重量;6、更新雌性蜘蛛量子位置,基于更新后的量子矢量旋转角,采用模拟量子矢量旋转门操作更新雌性蜘蛛量子位置;7、更新雄性蜘蛛量子位置,基于更新后的量子矢量旋转角,采用模拟量子矢量旋转门操作更新雄性蜘蛛量子位置;8更新各自历史最优位置;9:判断是否达到最大

一种稀疏MIMO平面阵列雷达天线构建方法.pdf
本发明提供了一种稀疏MIMO平面阵列雷达天线构建方法,它是以相位中心近似原理为基础,结合MIMO天线思想,采用MIMO思想进行天线布阵优化设计,当所有发射阵元同时(或轮流)发射正交信号,而接收阵元同时接收回波信号时,利用相位中心近似原理等效出具有均匀间隔的虚拟平面阵列;按照本发明构建的稀疏MIMO平面阵列雷达天线能够采用较少的发射天线阵元和接收天线阵元,虚拟实现等效的满阵元排布的平面天线阵列。与直接布设和等效的虚拟平面阵列同样大小的平面阵列天线相比,本发明的方法大幅度地减少了对阵元数目的需求。
基于天线阵列的二维平面定位方法.pdf
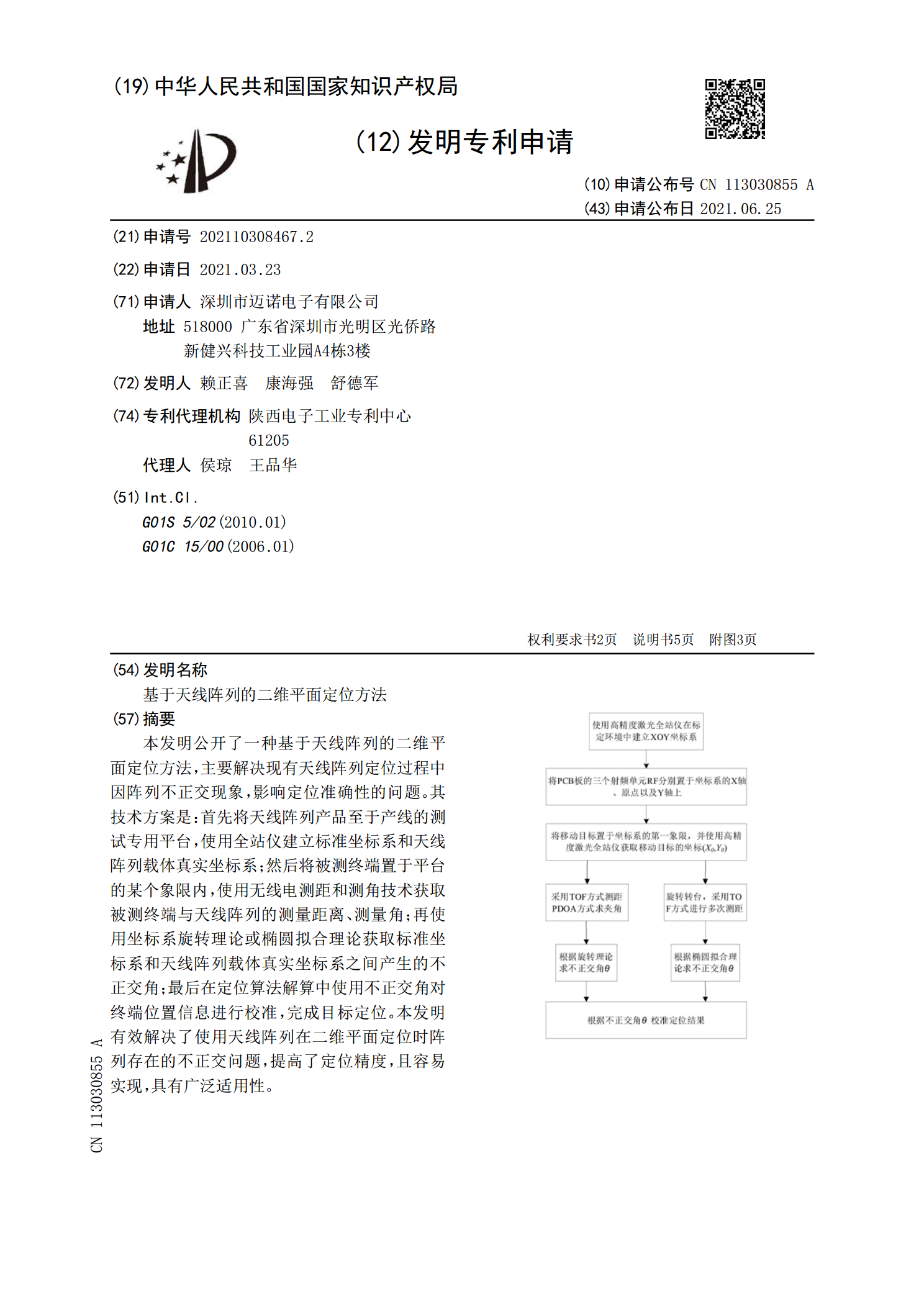
本发明公开了一种基于天线阵列的二维平面定位方法,主要解决现有天线阵列定位过程中因阵列不正交现象,影响定位准确性的问题。其技术方案是:首先将天线阵列产品至于产线的测试专用平台,使用全站仪建立标准坐标系和天线阵列载体真实坐标系;然后将被测终端置于平台的某个象限内,使用无线电测距和测角技术获取被测终端与天线阵列的测量距离、测量角;再使用坐标系旋转理论或椭圆拟合理论获取标准坐标系和天线阵列载体真实坐标系之间产生的不正交角;最后在定位算法解算中使用不正交角对终端位置信息进行校准,完成目标定位。本发明有效解决了使用天
一种基于稀疏平面阵列的虚拟共阵扩充方法.pdf
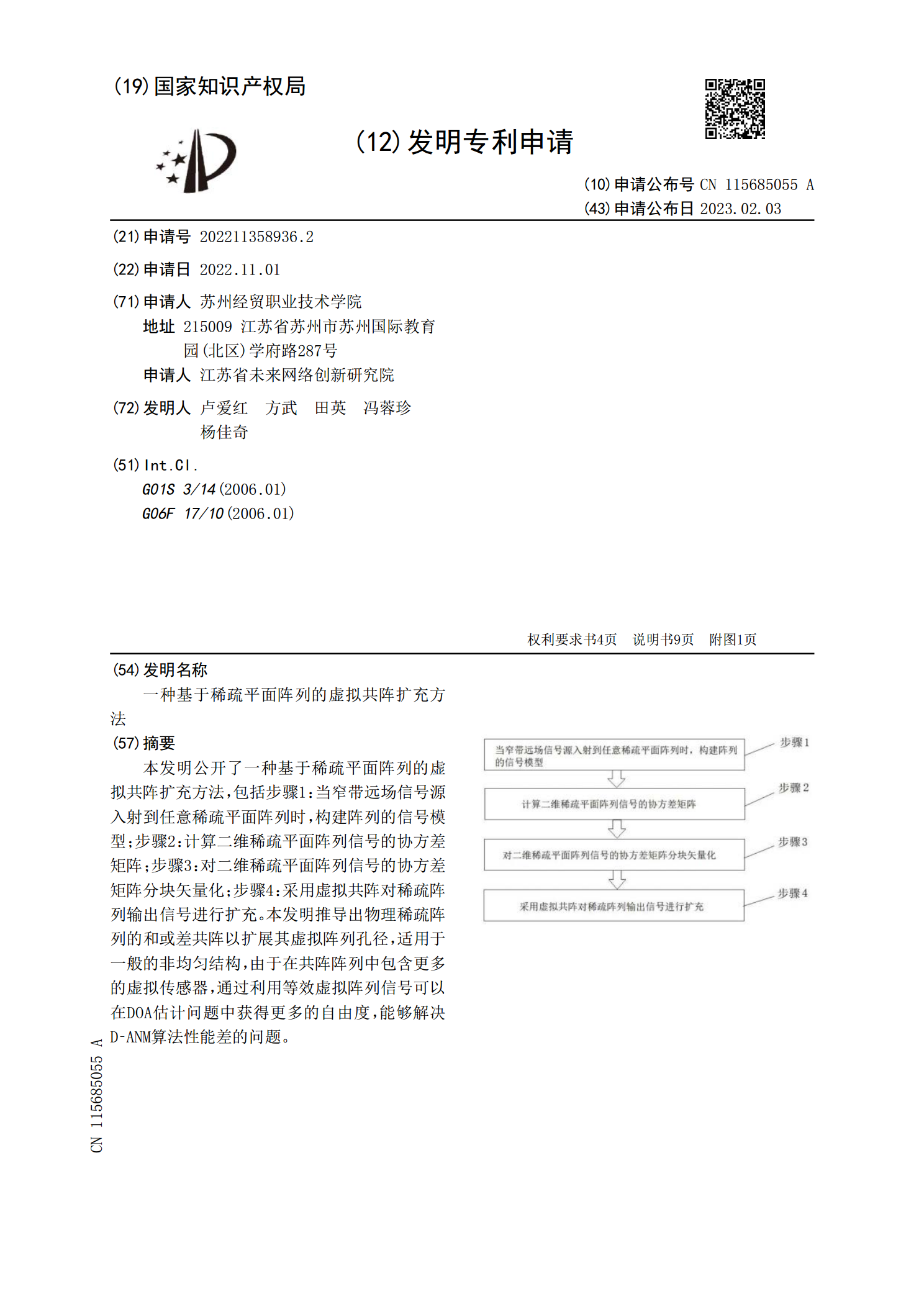
本发明公开了一种基于稀疏平面阵列的虚拟共阵扩充方法,包括步骤1:当窄带远场信号源入射到任意稀疏平面阵列时,构建阵列的信号模型;步骤2:计算二维稀疏平面阵列信号的协方差矩阵;步骤3:对二维稀疏平面阵列信号的协方差矩阵分块矢量化;步骤4:采用虚拟共阵对稀疏阵列输出信号进行扩充。本发明推导出物理稀疏阵列的和或差共阵以扩展其虚拟阵列孔径,适用于一般的非均匀结构,由于在共阵阵列中包含更多的虚拟传感器,通过利用等效虚拟阵列信号可以在DOA估计问题中获得更多的自由度,能够解决D?ANM算法性能差的问题。

基于量子猫群搜索机制的多目标中继选择方法.pdf
本发明提供的是一种基于量子猫群搜索机制的多目标中继选择方法。一,建立中继系统模型。二,初始化三个量子猫群。三,对第1个量子猫群和第2个量子猫进行更新。四:对第3个量子猫群中的每一量子猫进行更新。五:将第3个量子猫群更新出的H个量子猫放入非支配解集中。对非支配解集中的量子猫进行非支配解排序和拥挤度计算,保留前H个量子猫作为非支配解。将第3个量子猫的解群替换为非支配解集中的解。六:对非支配解集和演化单目标的量子猫群进行操作。七:如果进化没有终止,返回步骤三,否则,终止迭代,输出非支配解集中的非支配解。本发明可