
激光雷达系统以及车辆.pdf

代瑶****zy


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光雷达系统以及车辆.pdf
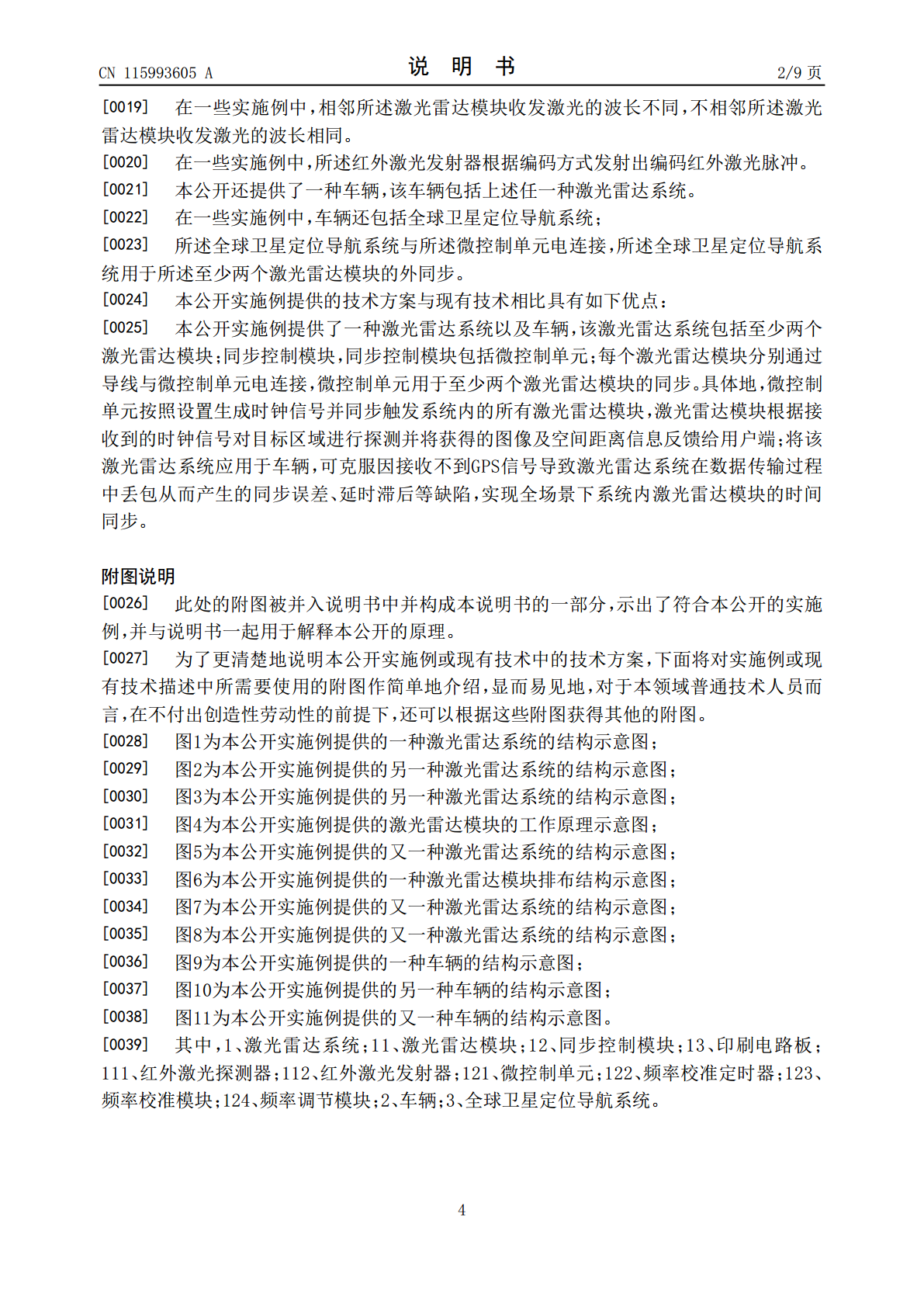
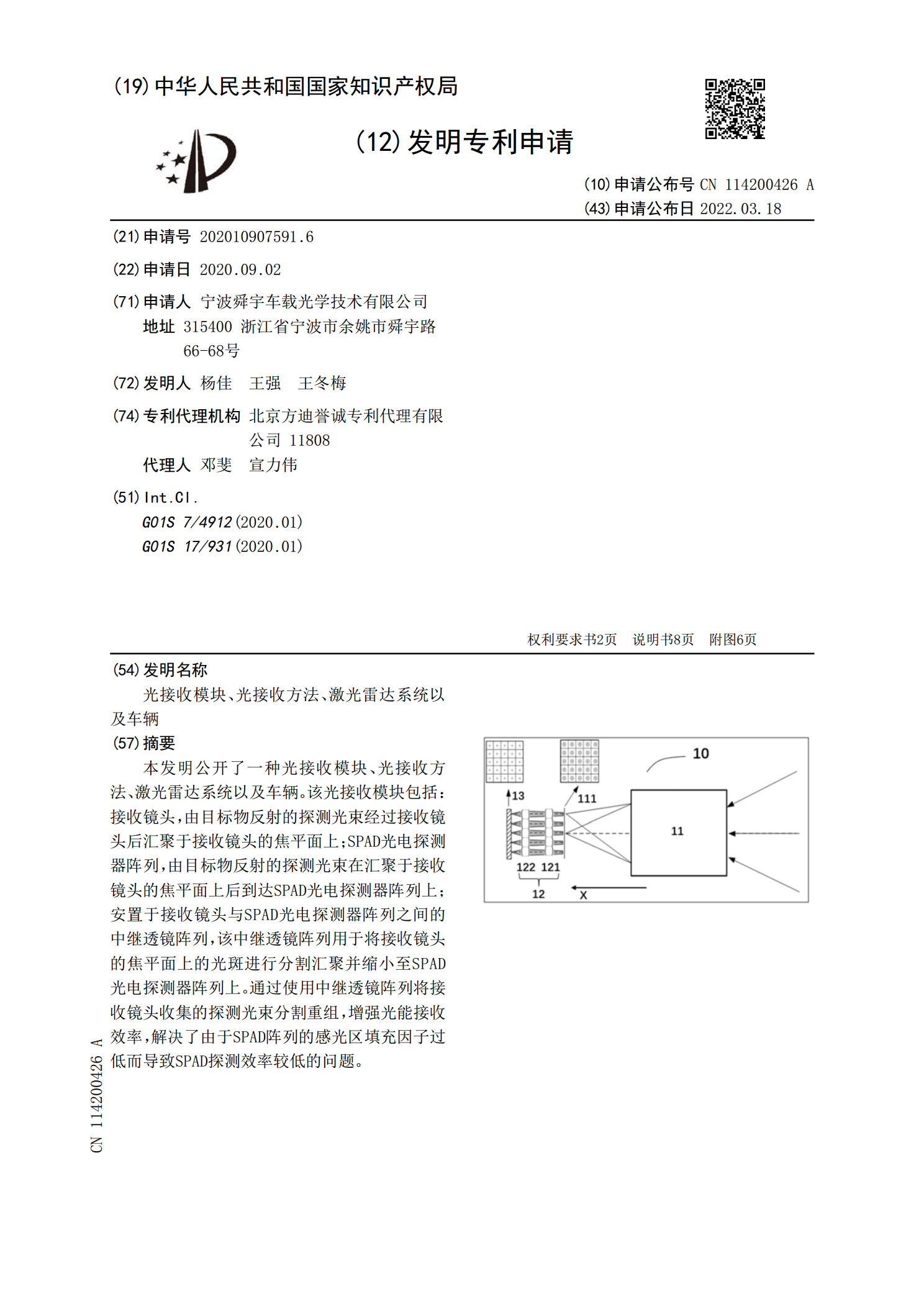
本公开涉及一种激光雷达系统以及车辆,该激光雷达系统包括至少两个激光雷达模块;同步控制模块,同步控制模块包括微控制单元;每个激光雷达模块分别通过导线与微控制单元电连接,微控制单元用于至少两个激光雷达模块的同步。具体地,微控制单元按照设置生成时钟信号并同步触发系统内的所有激光雷达模块,激光雷达模块根据接收到的时钟信号对目标区域进行探测并将获得的图像及空间距离信息反馈给用户端;将该激光雷达系统应用于车辆,可克服因接收不到GPS信号导致激光雷达系统在数据传输过程中丢包从而产生的同步误差、延时滞后等缺陷,实现全场景
激光雷达系统、车辆以及激光雷达探测方法.pdf
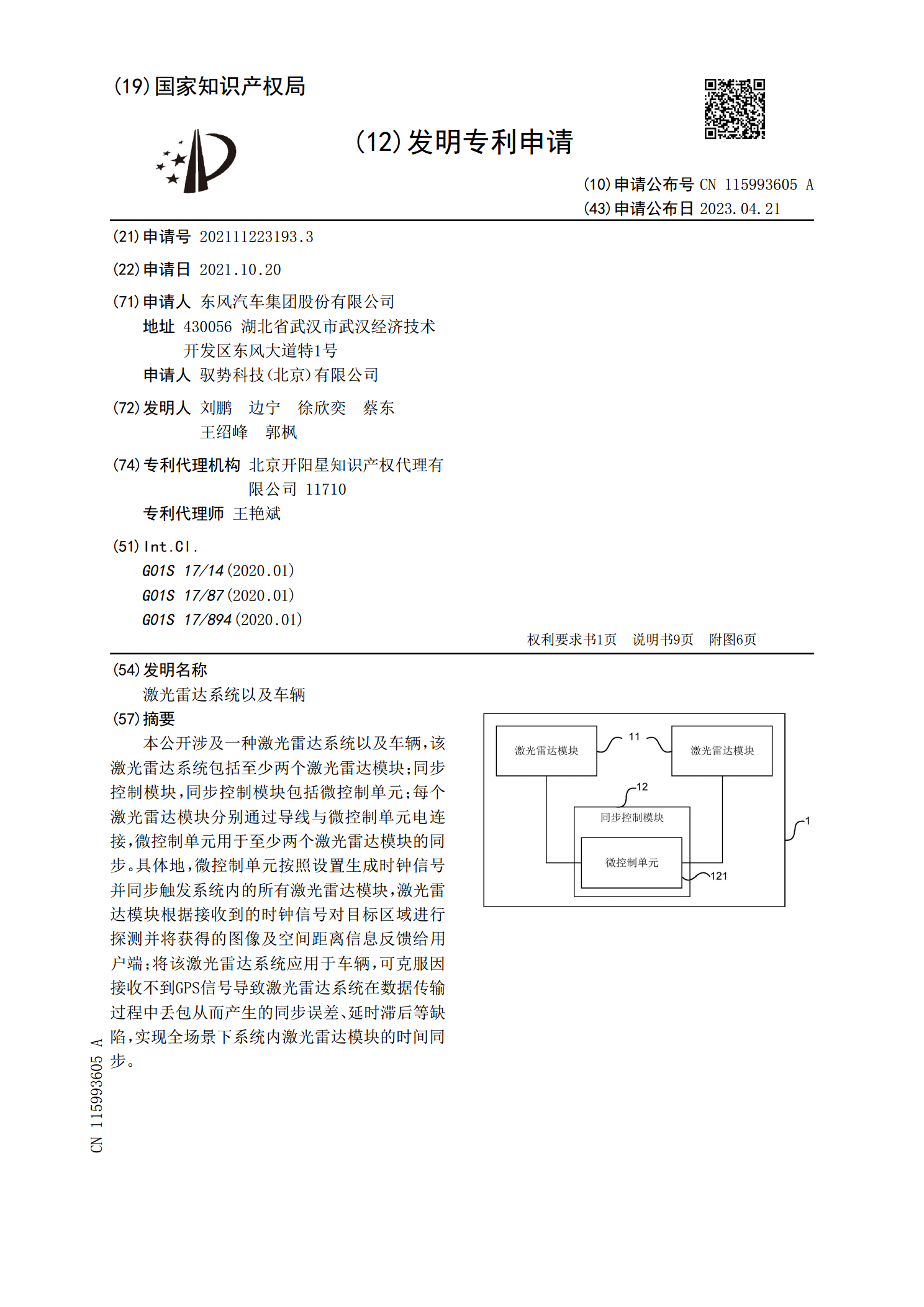
本发明公开了一种激光雷达系统、一种具有该激光雷达系统的车辆以及一种激光雷达探测方法。该激光雷达系统包括用于发射激光光束的发射模块、用于对激光光束进行二维扫描的扫描模块以及具有线阵APD的接收模块,其中,经目标物反射回来的光汇聚到线阵APD上。通过本发明能够有效避免杂光并且通过使用线阵APD能够简化装调过程,降低成本。
光接收模块、光接收方法、激光雷达系统以及车辆.pdf
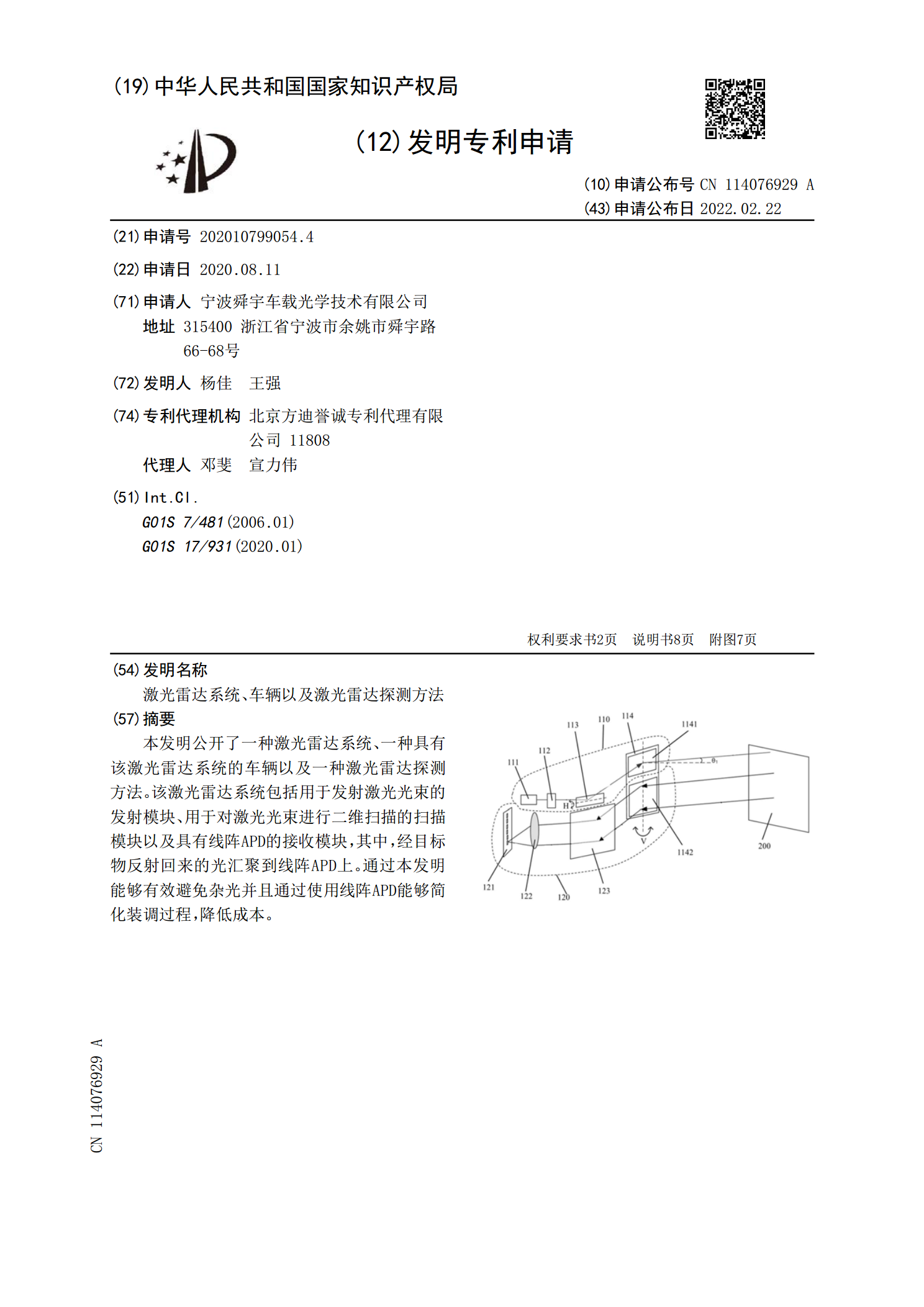
本发明公开了一种光接收模块、光接收方法、激光雷达系统以及车辆。该光接收模块包括:接收镜头,由目标物反射的探测光束经过接收镜头后汇聚于接收镜头的焦平面上;SPAD光电探测器阵列,由目标物反射的探测光束在汇聚于接收镜头的焦平面上后到达SPAD光电探测器阵列上;安置于接收镜头与SPAD光电探测器阵列之间的中继透镜阵列,该中继透镜阵列用于将接收镜头的焦平面上的光斑进行分割汇聚并缩小至SPAD光电探测器阵列上。通过使用中继透镜阵列将接收镜头收集的探测光束分割重组,增强光能接收效率,解决了由于SPAD阵列的感光区填充
固态激光雷达系统及车辆.pdf
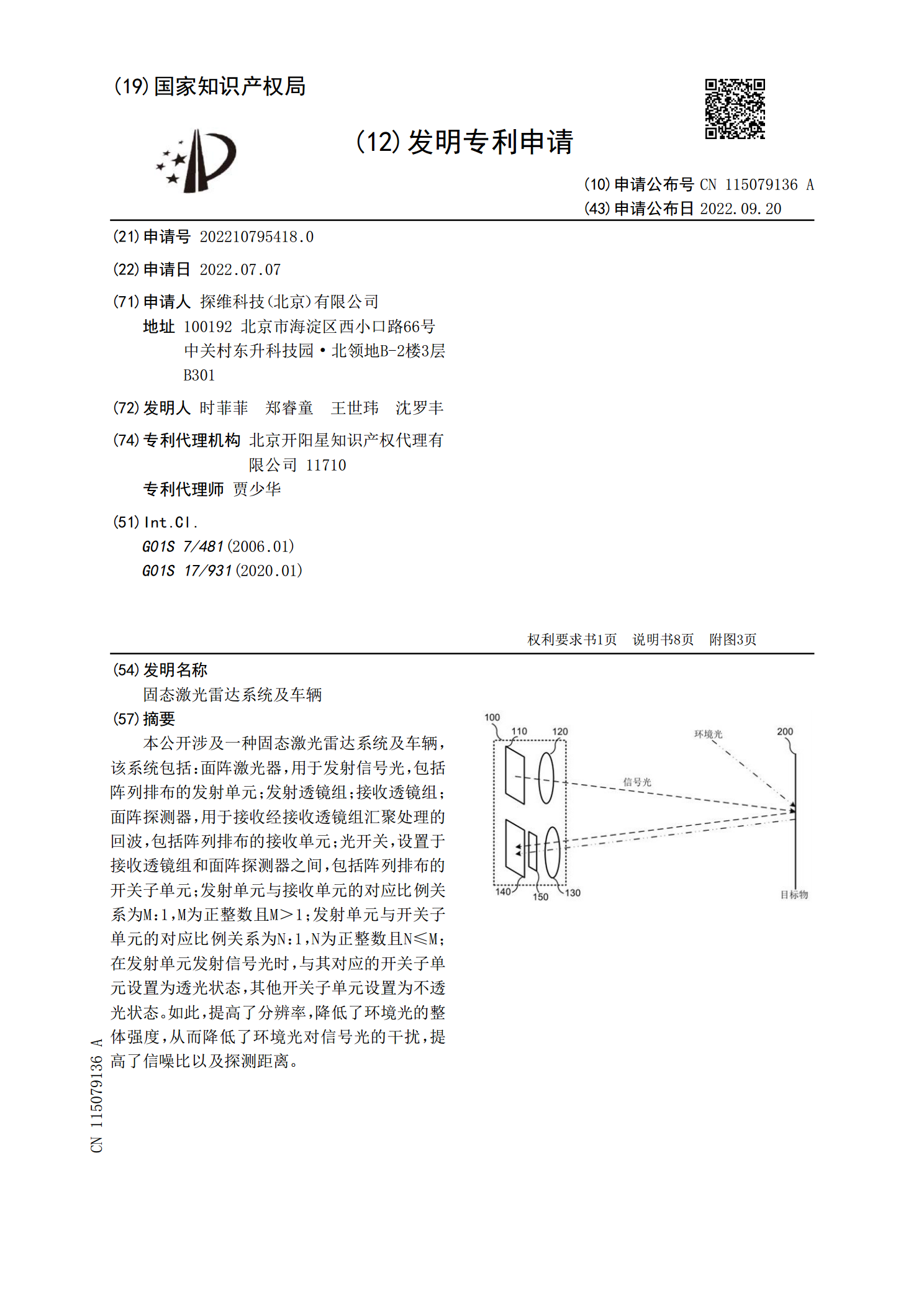
本公开涉及一种固态激光雷达系统及车辆,该系统包括:面阵激光器,用于发射信号光,包括阵列排布的发射单元;发射透镜组;接收透镜组;面阵探测器,用于接收经接收透镜组汇聚处理的回波,包括阵列排布的接收单元;光开关,设置于接收透镜组和面阵探测器之间,包括阵列排布的开关子单元;发射单元与接收单元的对应比例关系为M:1,M为正整数且M>1;发射单元与开关子单元的对应比例关系为N:1,N为正整数且N≤M;在发射单元发射信号光时,与其对应的开关子单元设置为透光状态,其他开关子单元设置为不透光状态。如此,提高了分辨率,降低了

车辆以及车辆的供油系统.pdf
本发明公开了一种车辆的供油系统,包括:主油箱;副油箱;油箱转换阀,油箱转换阀包括:阀体、第一阀芯、第二阀芯和手动操纵件,阀体形成有主油箱通道和副油箱通道,第一阀芯设置于主油箱通道内且用于控制主油箱通道的开闭,第二阀芯设置于副油箱通道内且用于控制副油箱通道的开闭,手动操纵件与第一阀芯和第二阀芯传动,同步带动第一阀芯和第二阀芯运动,从而主油箱通道和副油箱通道中的一个处于导通状态且另一个处于关闭状态。油箱转换阀设置为集成式手动油箱转换阀,可以避免电机故障。另外,可以实现切换主油箱供油和回油的同时副油箱进行供油和