
机器人3D视觉快速定位抓取方法及系统.pdf

婀娜****aj

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人3D视觉快速定位抓取方法及系统.pdf
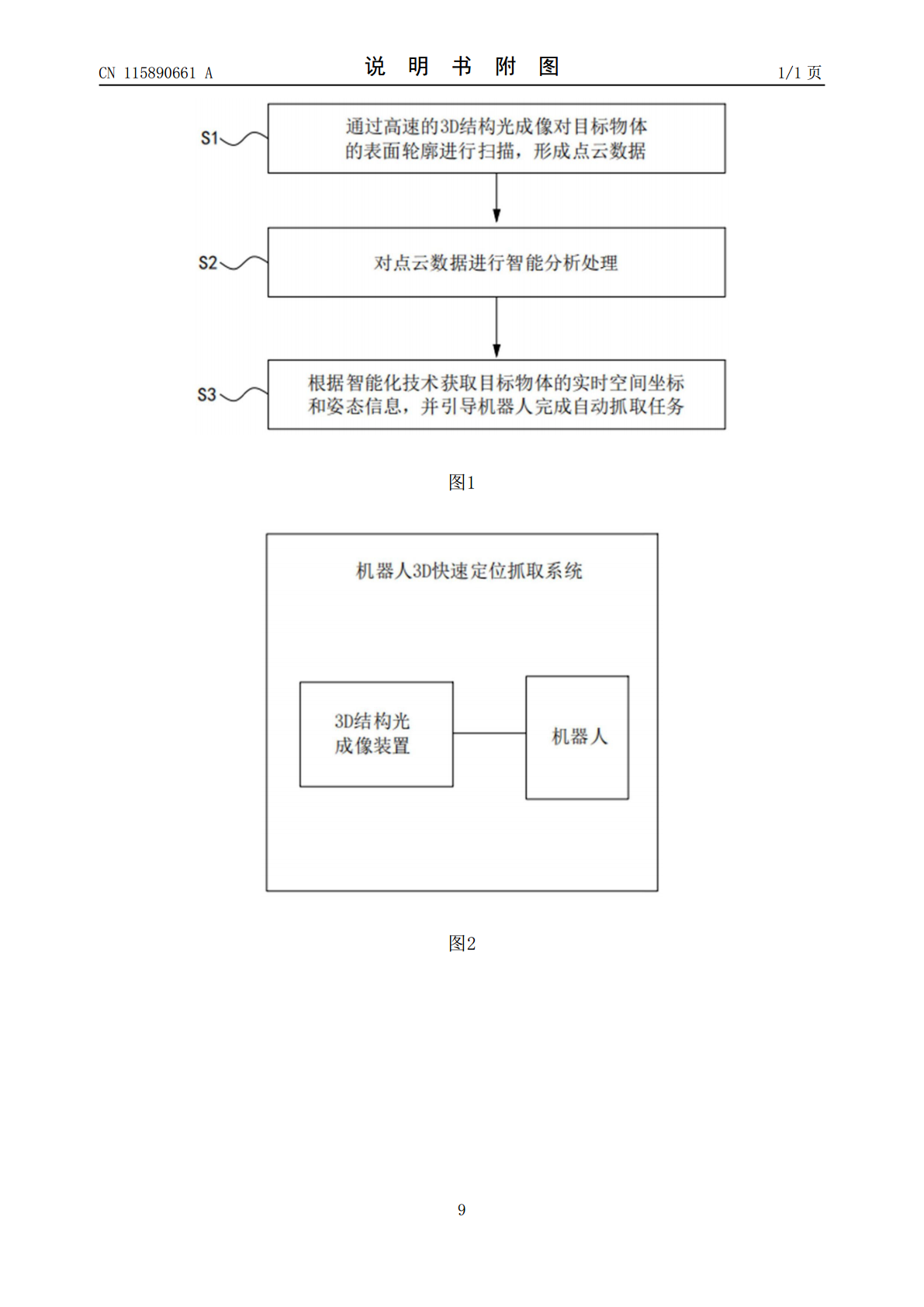
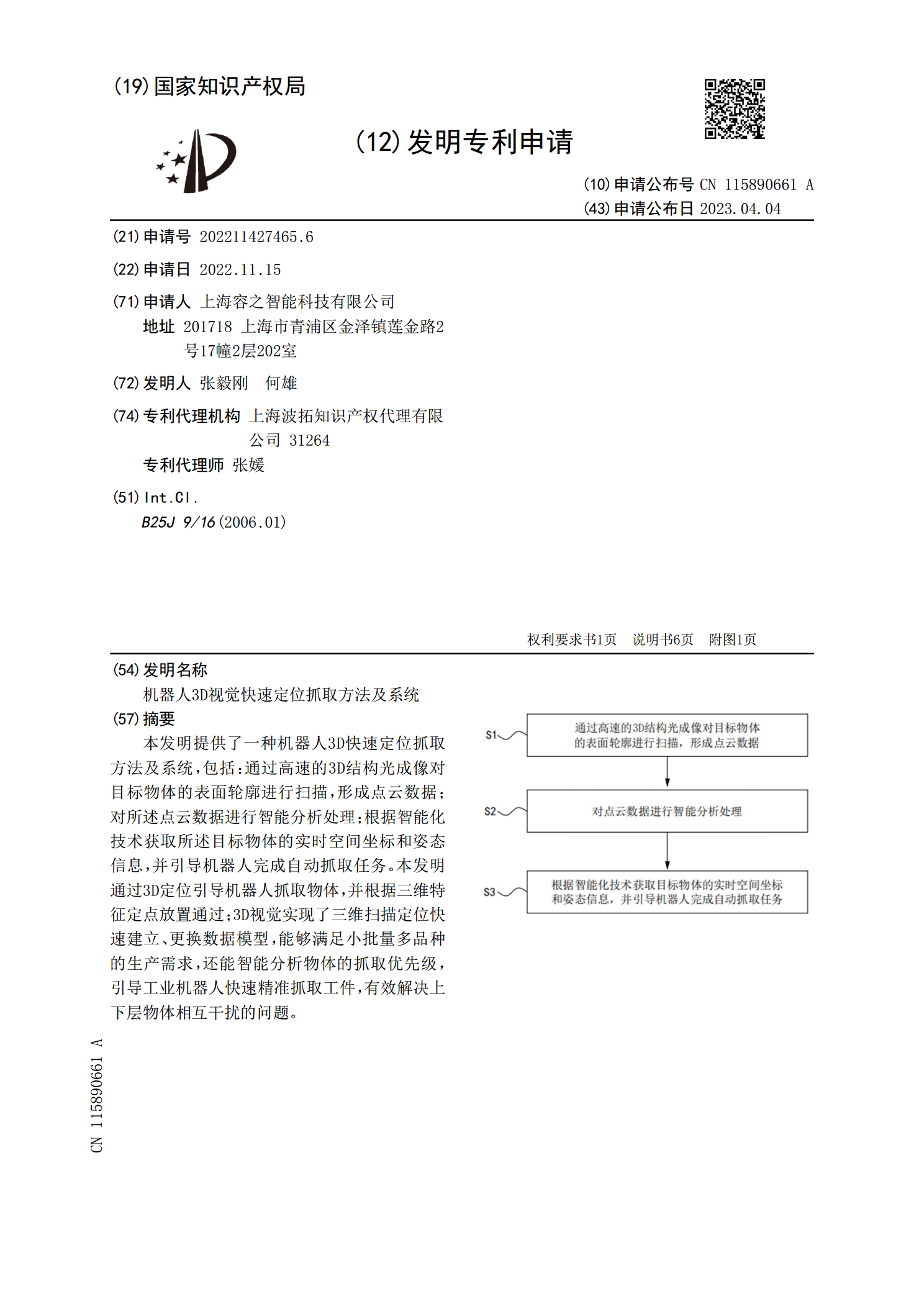
本发明提供了一种机器人3D快速定位抓取方法及系统,包括:通过高速的3D结构光成像对目标物体的表面轮廓进行扫描,形成点云数据;对所述点云数据进行智能分析处理;根据智能化技术获取所述目标物体的实时空间坐标和姿态信息,并引导机器人完成自动抓取任务。本发明通过3D定位引导机器人抓取物体,并根据三维特征定点放置通过;3D视觉实现了三维扫描定位快速建立、更换数据模型,能够满足小批量多品种的生产需求,还能智能分析物体的抓取优先级,引导工业机器人快速精准抓取工件,有效解决上下层物体相互干扰的问题。
基于3D视觉的机器人自动抓取系统及方法.pdf
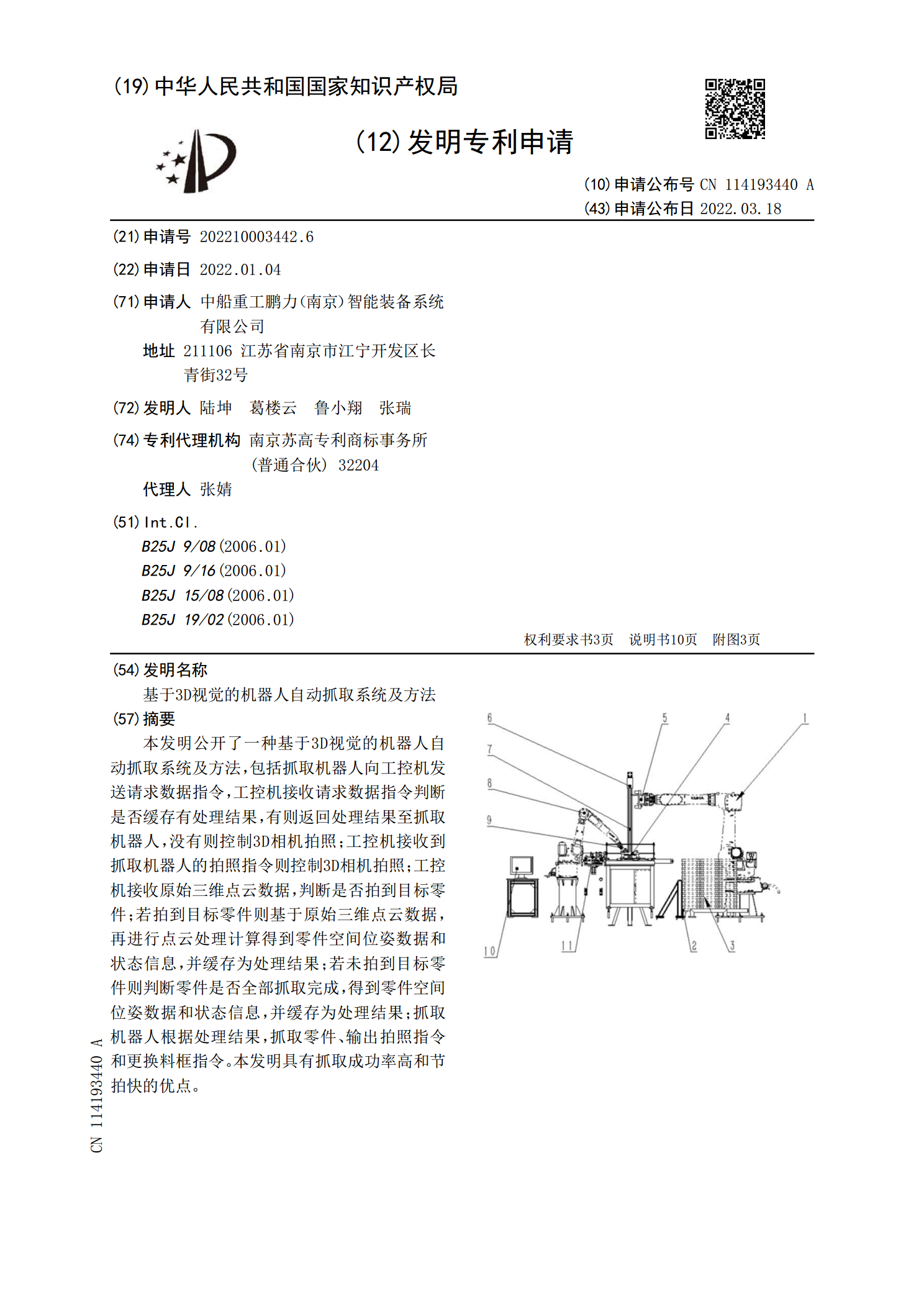
本发明公开了一种基于3D视觉的机器人自动抓取系统及方法,包括抓取机器人向工控机发送请求数据指令,工控机接收请求数据指令判断是否缓存有处理结果,有则返回处理结果至抓取机器人,没有则控制3D相机拍照;工控机接收到抓取机器人的拍照指令则控制3D相机拍照;工控机接收原始三维点云数据,判断是否拍到目标零件;若拍到目标零件则基于原始三维点云数据,再进行点云处理计算得到零件空间位姿数据和状态信息,并缓存为处理结果;若未拍到目标零件则判断零件是否全部抓取完成,得到零件空间位姿数据和状态信息,并缓存为处理结果;抓取机器人根
一种基于激光视觉引导的机器人定位抓取方法及系统.pdf
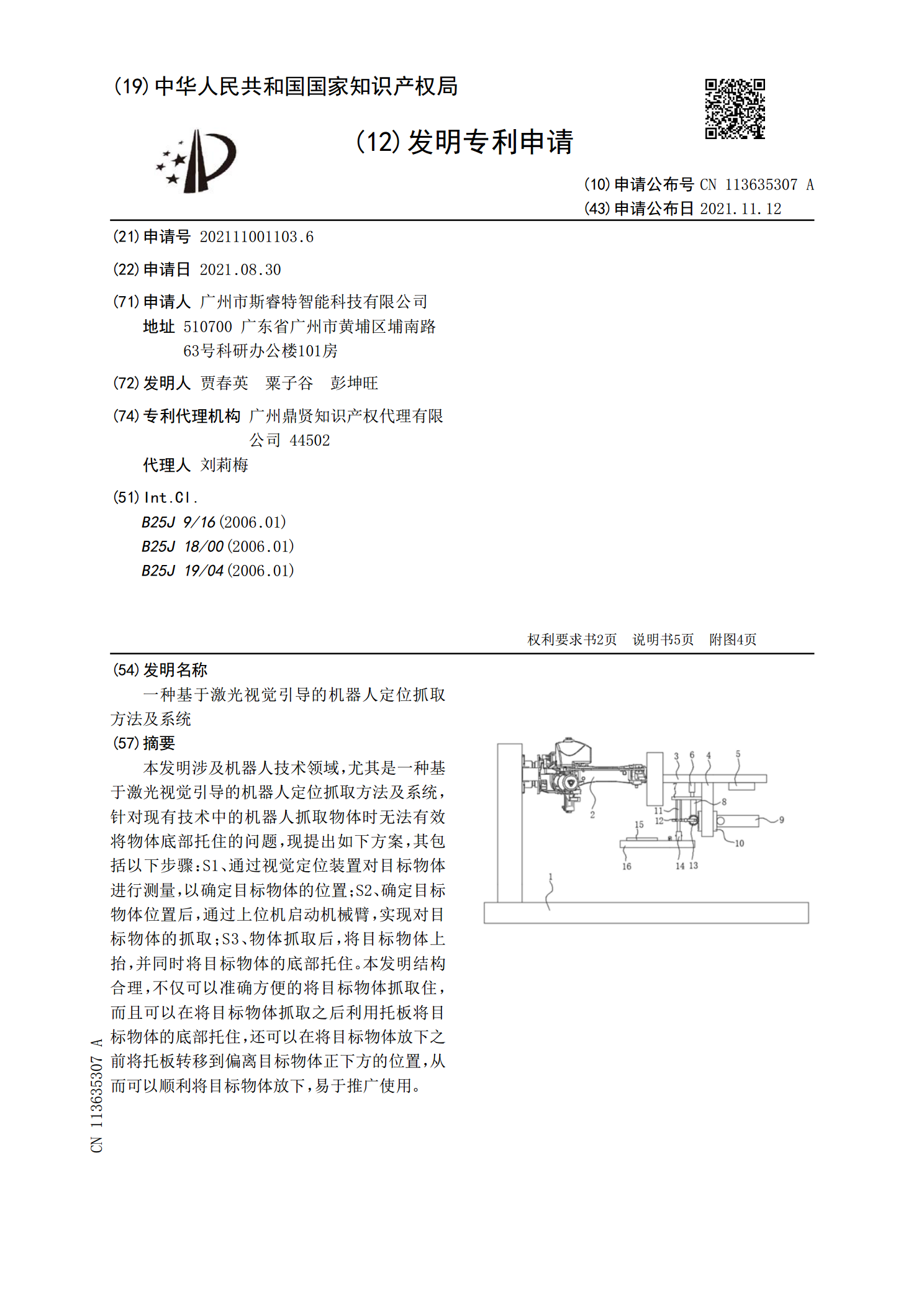
本发明涉及机器人技术领域,尤其是一种基于激光视觉引导的机器人定位抓取方法及系统,针对现有技术中的机器人抓取物体时无法有效将物体底部托住的问题,现提出如下方案,其包括以下步骤:S1、通过视觉定位装置对目标物体进行测量,以确定目标物体的位置;S2、确定目标物体位置后,通过上位机启动机械臂,实现对目标物体的抓取;S3、物体抓取后,将目标物体上抬,并同时将目标物体的底部托住。本发明结构合理,不仅可以准确方便的将目标物体抓取住,而且可以在将目标物体抓取之后利用托板将目标物体的底部托住,还可以在将目标物体放下之前将托
一种基于主动视觉定位的服务机器人抓取系统.pdf
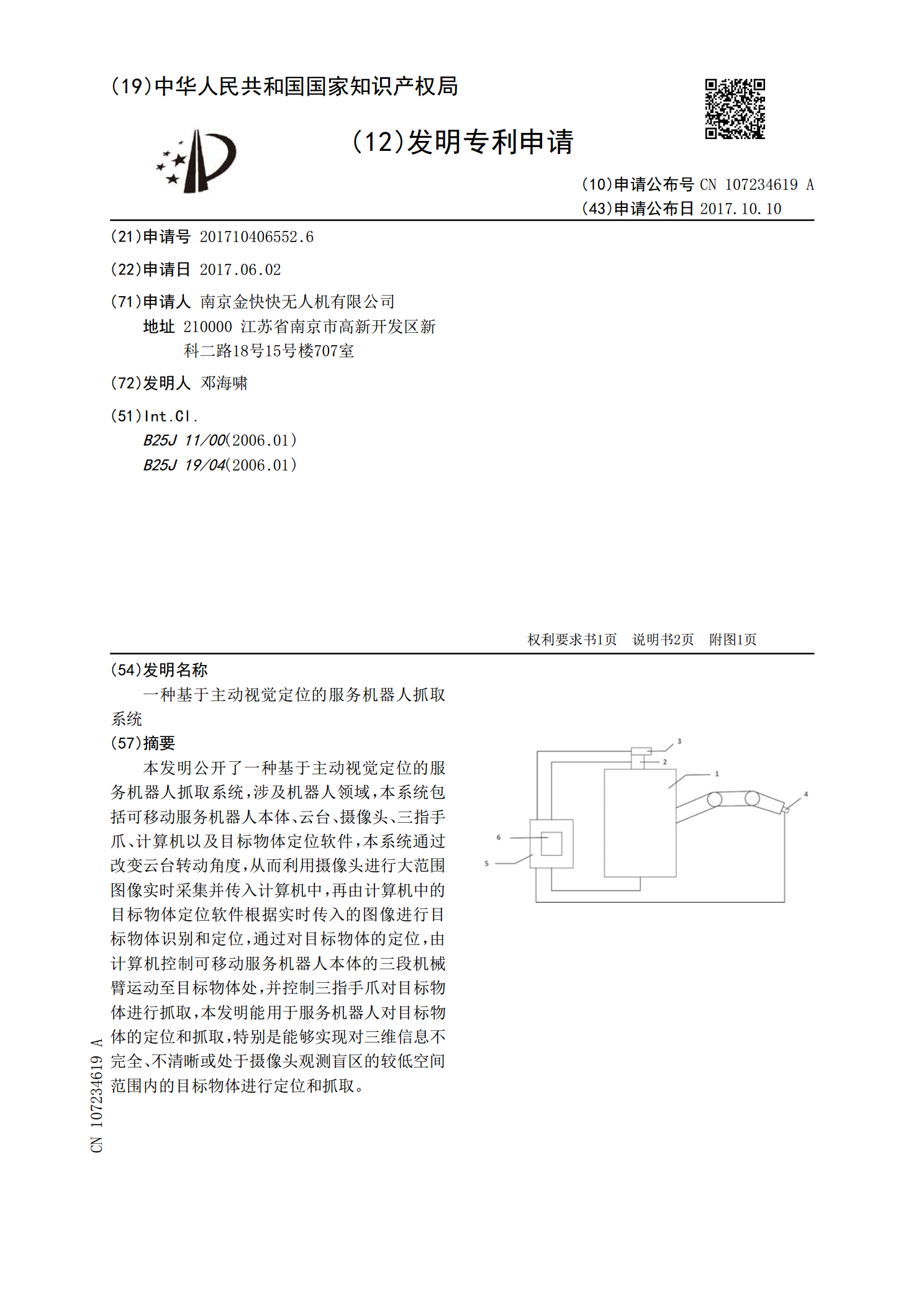
本发明公开了一种基于主动视觉定位的服务机器人抓取系统,涉及机器人领域,本系统包括可移动服务机器人本体、云台、摄像头、三指手爪、计算机以及目标物体定位软件,本系统通过改变云台转动角度,从而利用摄像头进行大范围图像实时采集并传入计算机中,再由计算机中的目标物体定位软件根据实时传入的图像进行目标物体识别和定位,通过对目标物体的定位,由计算机控制可移动服务机器人本体的三段机械臂运动至目标物体处,并控制三指手爪对目标物体进行抓取,本发明能用于服务机器人对目标物体的定位和抓取,特别是能够实现对三维信息不完全、不清晰或

一种快速3D视觉激光测量定位方法.pdf
本发明提供了一种快速3D视觉激光测量定位方法,包括以下步骤:S1、将被测物放置于XOY平面上;S2、在Z轴方向上距离被测物一定高度距离处设置一扫描装置,所述扫描装置中设有半导体激光器、第一透镜、第二透镜、二维CMOS阵列和信号处理器;S3、通过信号处理器驱动半导体激光器发射出激光,并通过第一透镜将半导体激光器射出的激光形成一平面光幕投射到被测物上,使该平面光幕在被测物表面形成一条激光轮廓线;S4、通过第二透镜收集从被测物表面的激光轮廓线上反射回来的光,并将其投射到二维CMOS阵列中,形成被测物上激光轮廓线