
全自动装箱码垛装置.pdf

猫巷****晓容

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

全自动装箱码垛装置.pdf
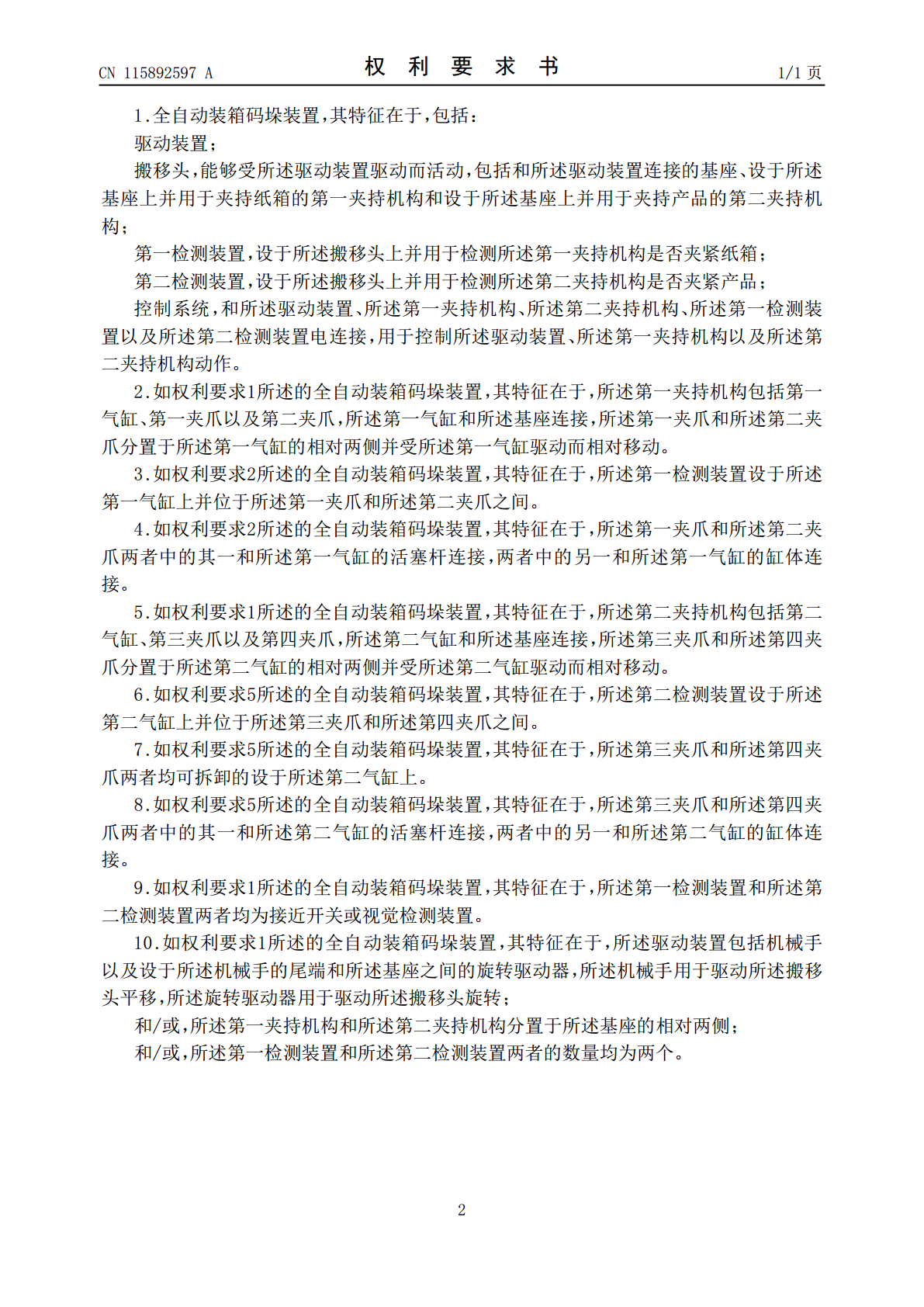
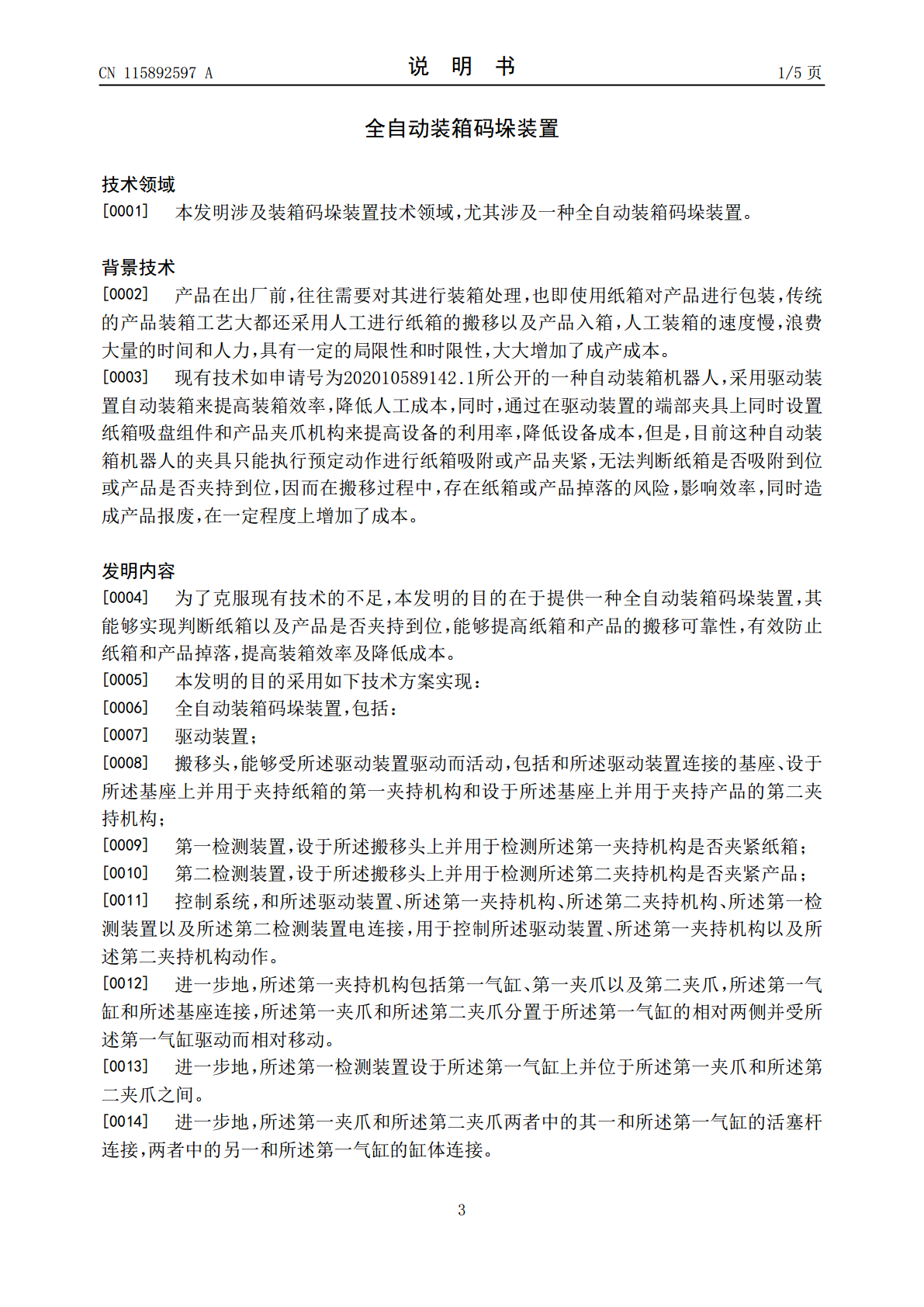
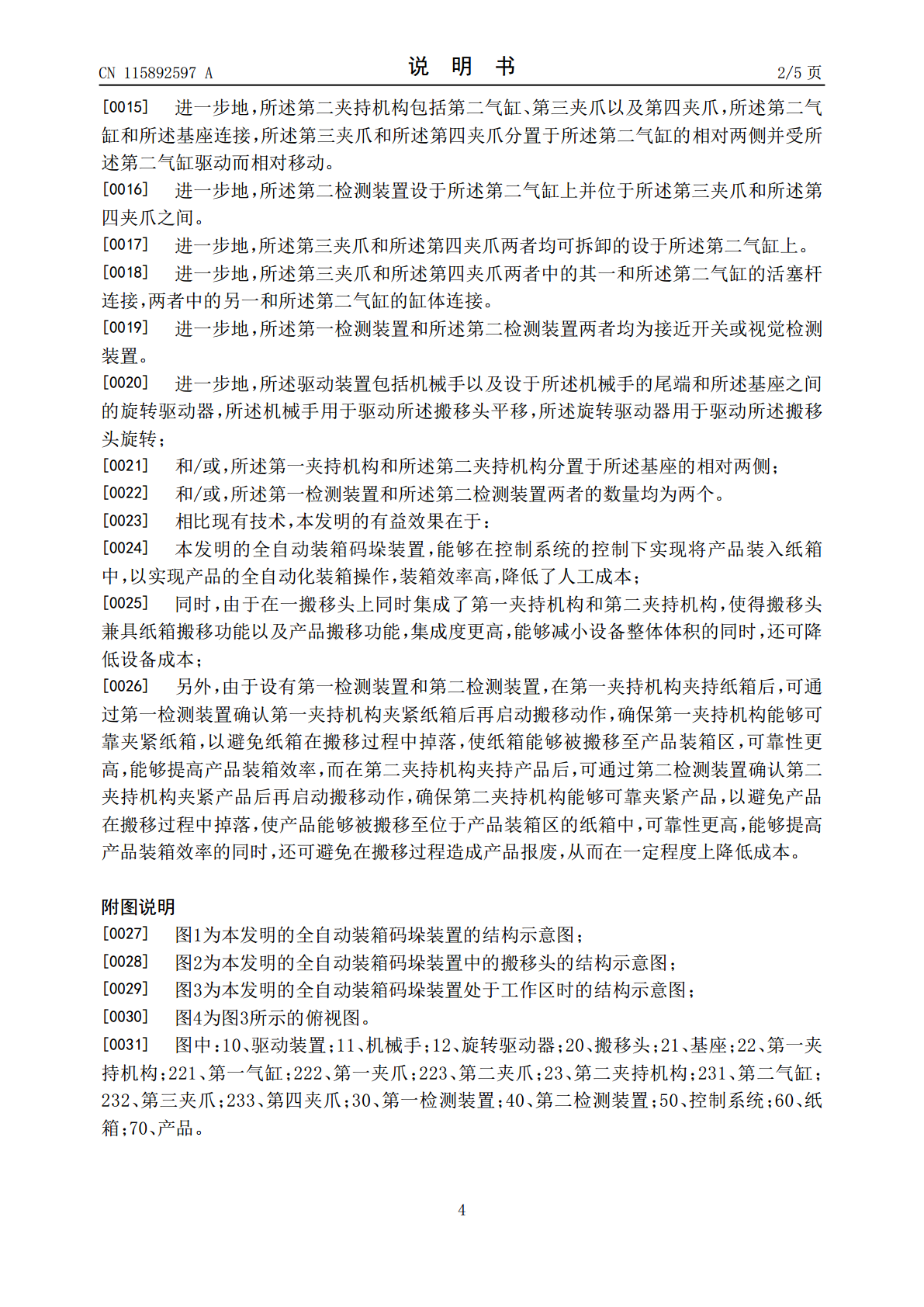
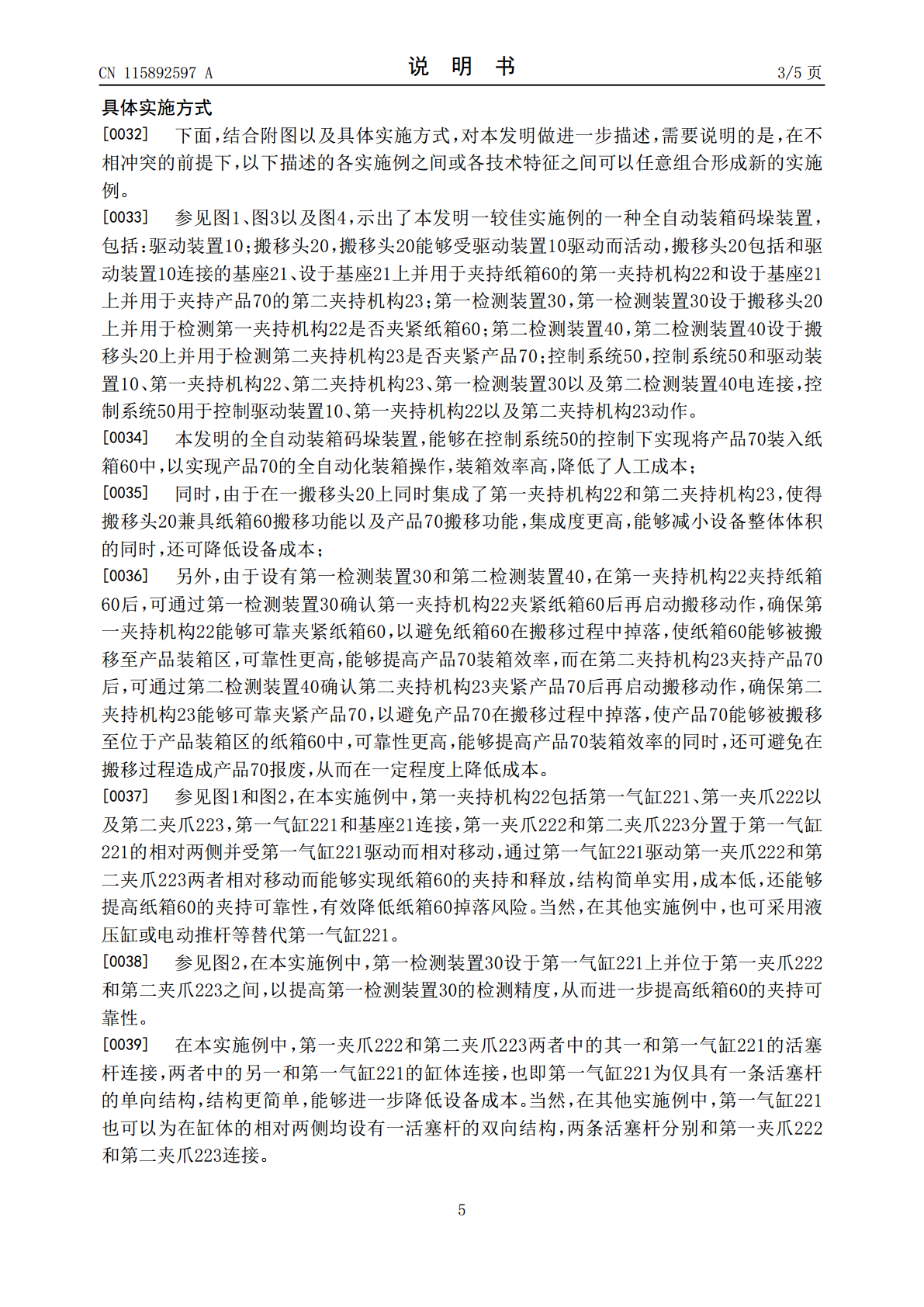
本发明公开了一种全自动装箱码垛装置,包括:驱动装置;搬移头,能够受驱动装置驱动而活动,包括和驱动装置连接的基座、设于基座上并用于夹持纸箱的第一夹持机构和设于基座上并用于夹持产品的第二夹持机构;第一检测装置,设于搬移头上并用于检测第一夹持机构是否夹紧纸箱;第二检测装置,设于搬移头上并用于检测第二夹持机构是否夹紧产品;控制系统,和驱动装置、第一夹持机构、第二夹持机构、第一检测装置以及第二检测装置电连接,用于控制驱动装置、第一夹持机构以及第二夹持机构动作。其能够实现判断纸箱以及产品是否夹持到位,能够提高纸箱和产
一种导光板全自动码垛装置.pdf
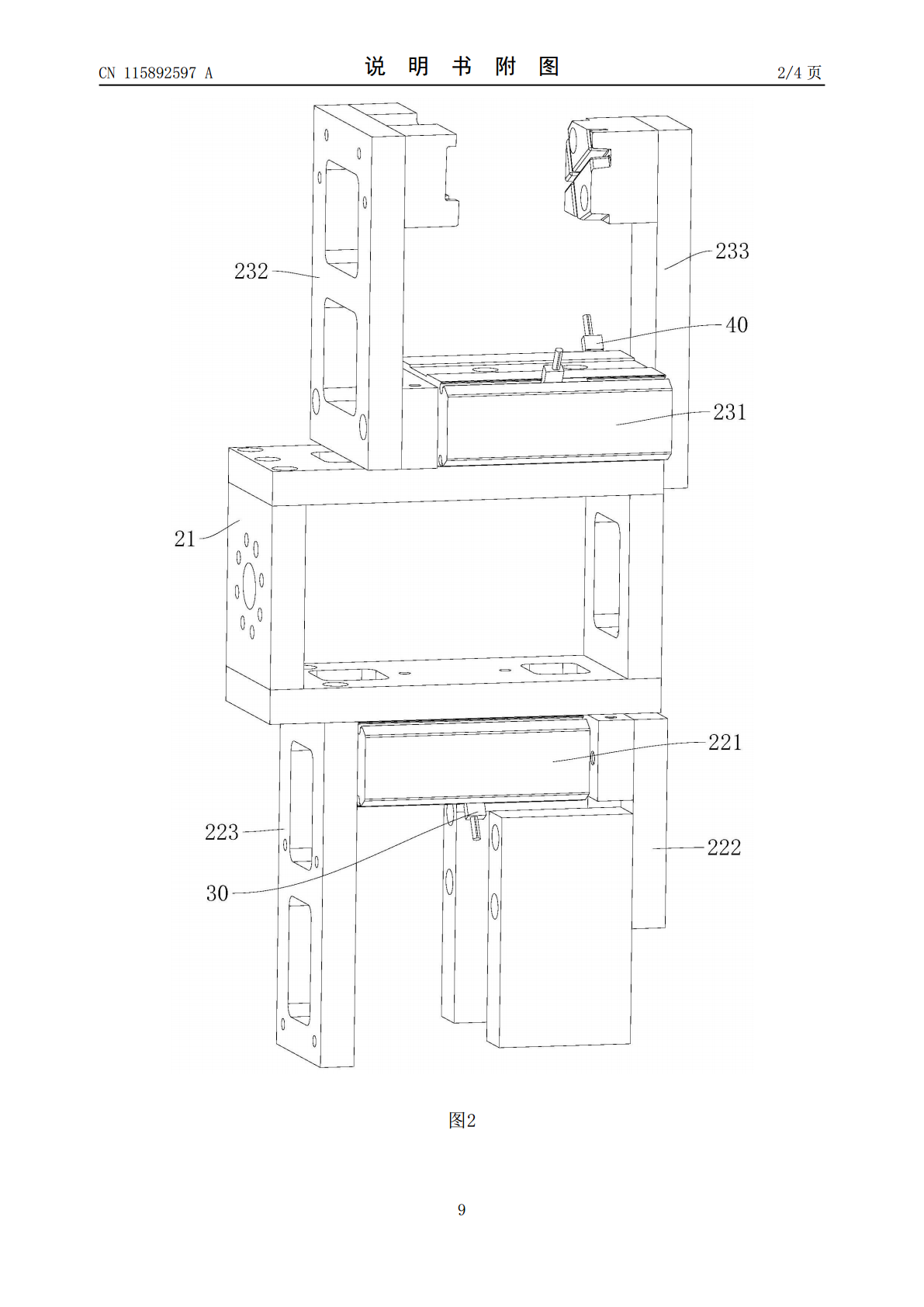
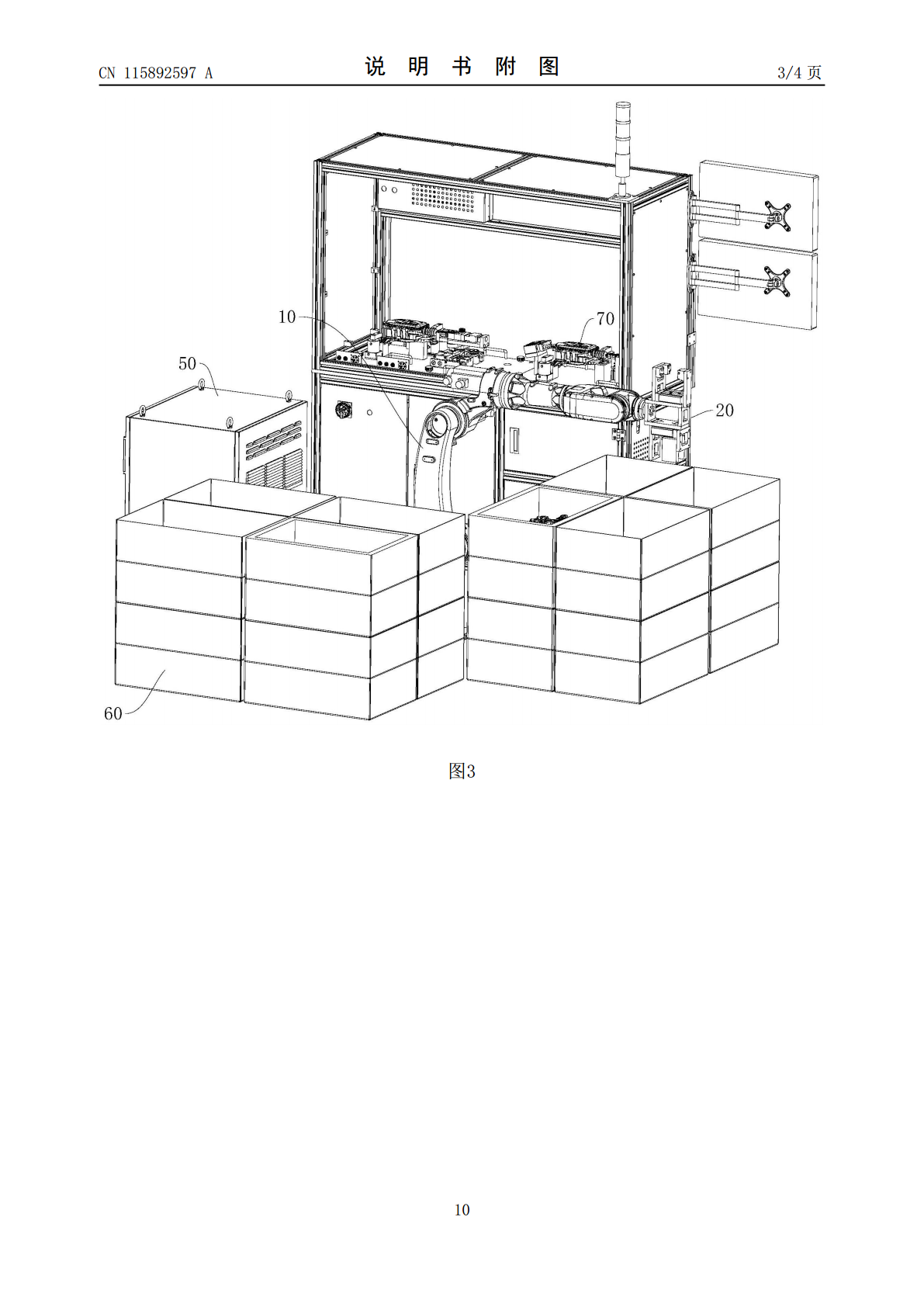
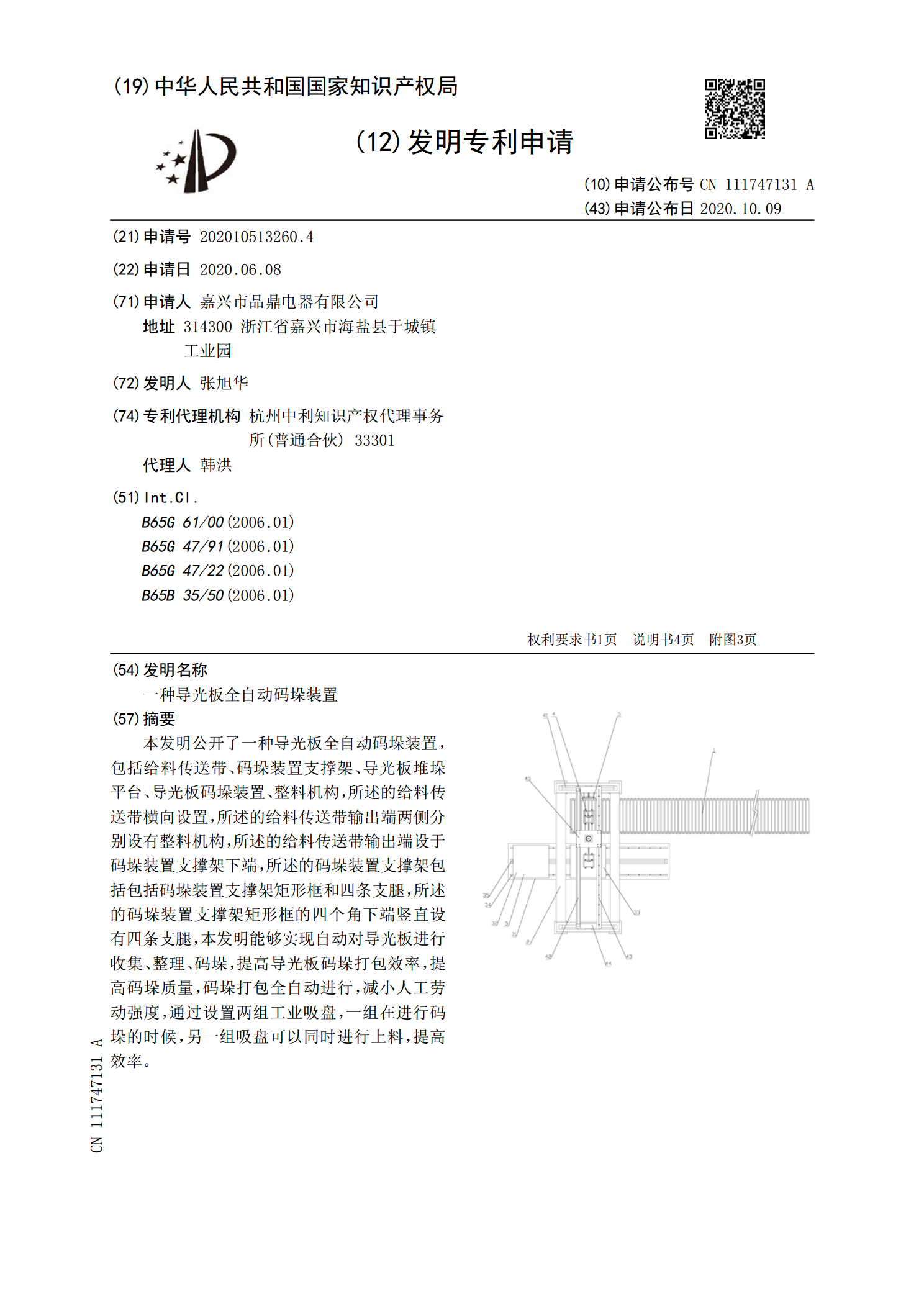
本发明公开了一种导光板全自动码垛装置,包括给料传送带、码垛装置支撑架、导光板堆垛平台、导光板码垛装置、整料机构,所述的给料传送带横向设置,所述的给料传送带输出端两侧分别设有整料机构,所述的给料传送带输出端设于码垛装置支撑架下端,所述的码垛装置支撑架包括包括码垛装置支撑架矩形框和四条支腿,所述的码垛装置支撑架矩形框的四个角下端竖直设有四条支腿,本发明能够实现自动对导光板进行收集、整理、码垛,提高导光板码垛打包效率,提高码垛质量,码垛打包全自动进行,减小人工劳动强度,通过设置两组工业吸盘,一组在进行码垛的时候
全自动矿用锚固剂装箱码垛生产线及其生产方法.pdf
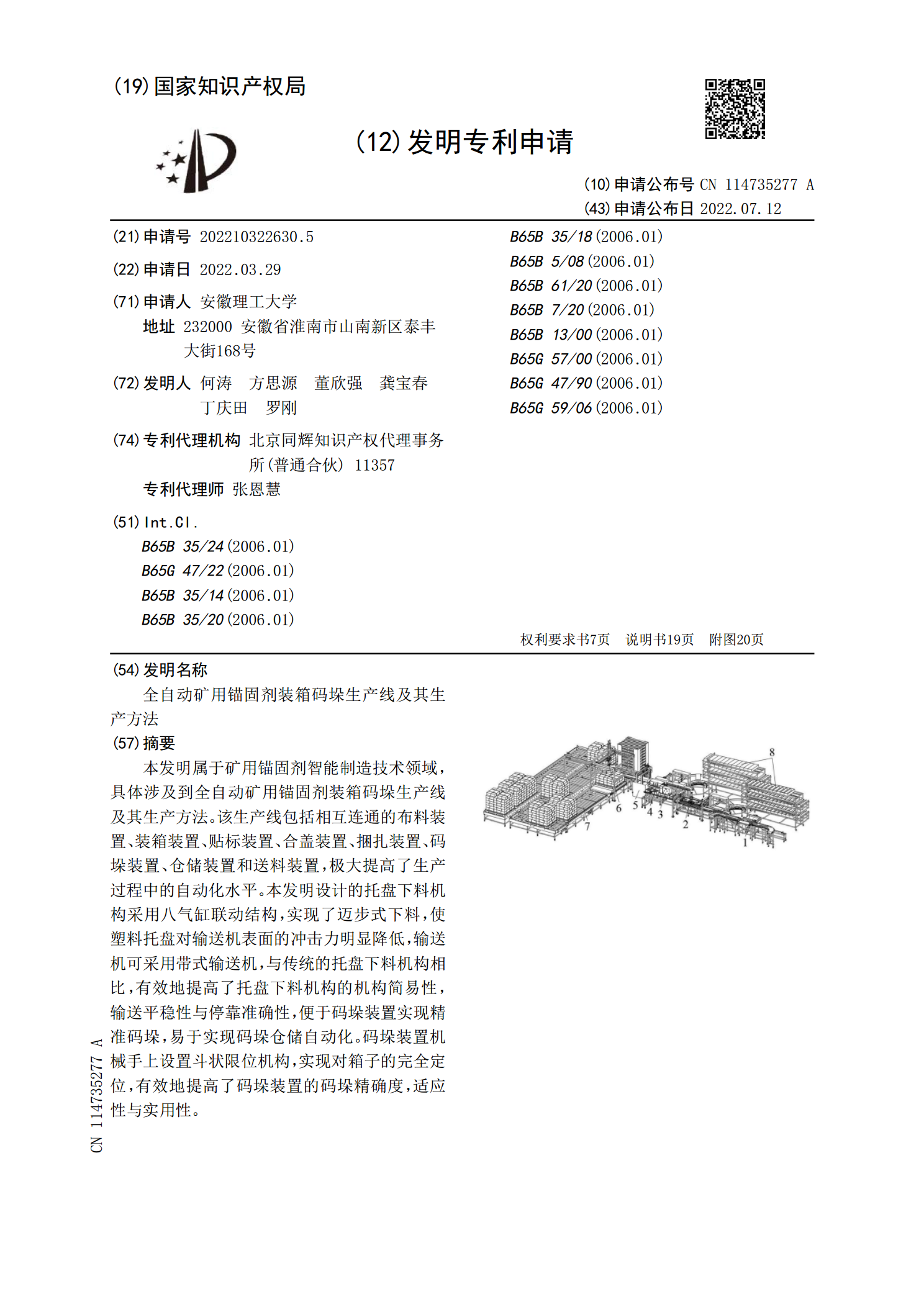
本发明属于矿用锚固剂智能制造技术领域,具体涉及到全自动矿用锚固剂装箱码垛生产线及其生产方法。该生产线包括相互连通的布料装置、装箱装置、贴标装置、合盖装置、捆扎装置、码垛装置、仓储装置和送料装置,极大提高了生产过程中的自动化水平。本发明设计的托盘下料机构采用八气缸联动结构,实现了迈步式下料,使塑料托盘对输送机表面的冲击力明显降低,输送机可采用带式输送机,与传统的托盘下料机构相比,有效地提高了托盘下料机构的机构简易性,输送平稳性与停靠准确性,便于码垛装置实现精准码垛,易于实现码垛仓储自动化。码垛装置机械手上设
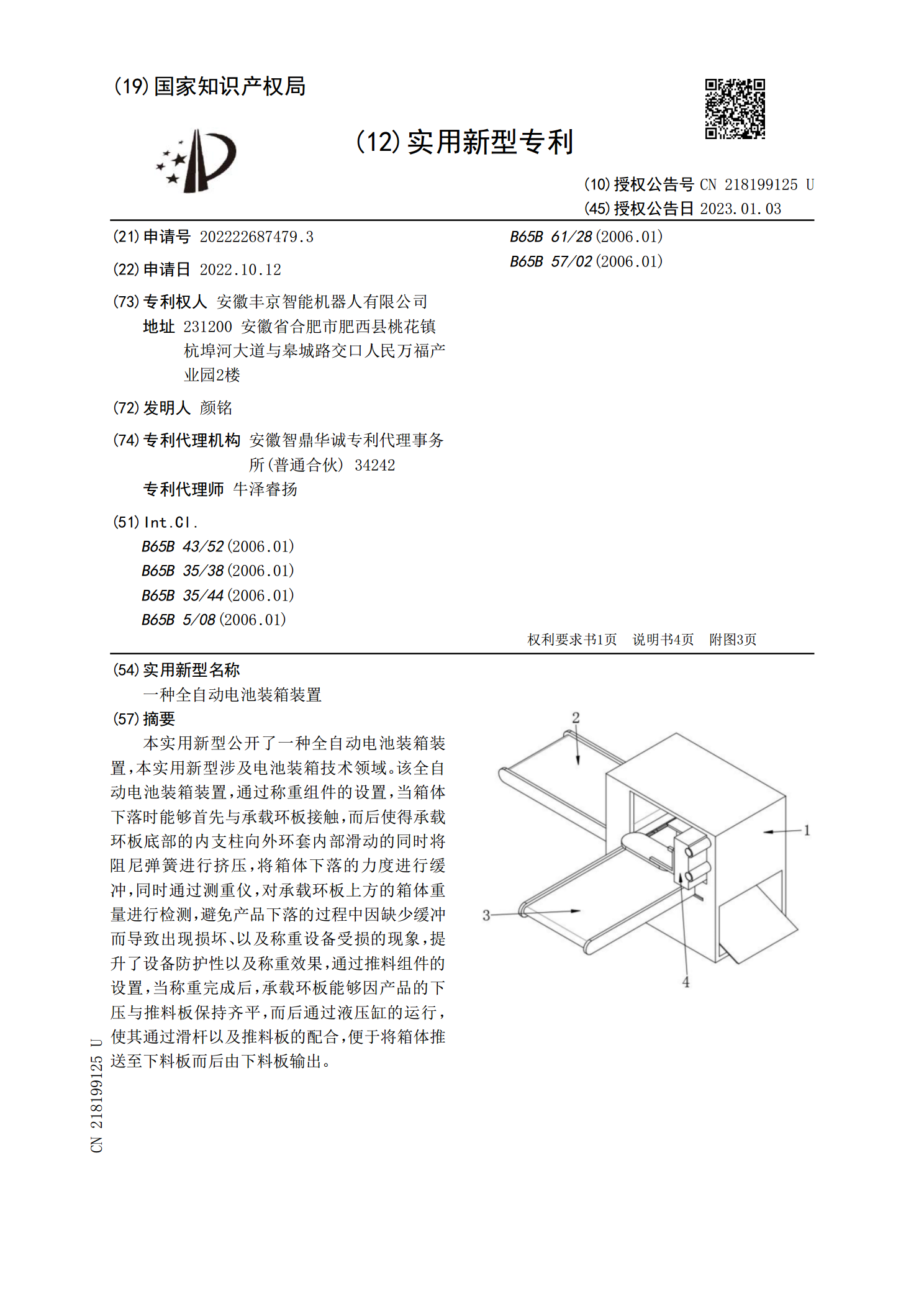
一种全自动电池装箱装置.pdf
本实用新型公开了一种全自动电池装箱装置,本实用新型涉及电池装箱技术领域。该全自动电池装箱装置,通过称重组件的设置,当箱体下落时能够首先与承载环板接触,而后使得承载环板底部的内支柱向外环套内部滑动的同时将阻尼弹簧进行挤压,将箱体下落的力度进行缓冲,同时通过测重仪,对承载环板上方的箱体重量进行检测,避免产品下落的过程中因缺少缓冲而导致出现损坏、以及称重设备受损的现象,提升了设备防护性以及称重效果,通过推料组件的设置,当称重完成后,承载环板能够因产品的下压与推料板保持齐平,而后通过液压缸的运行,使其通过滑杆以及
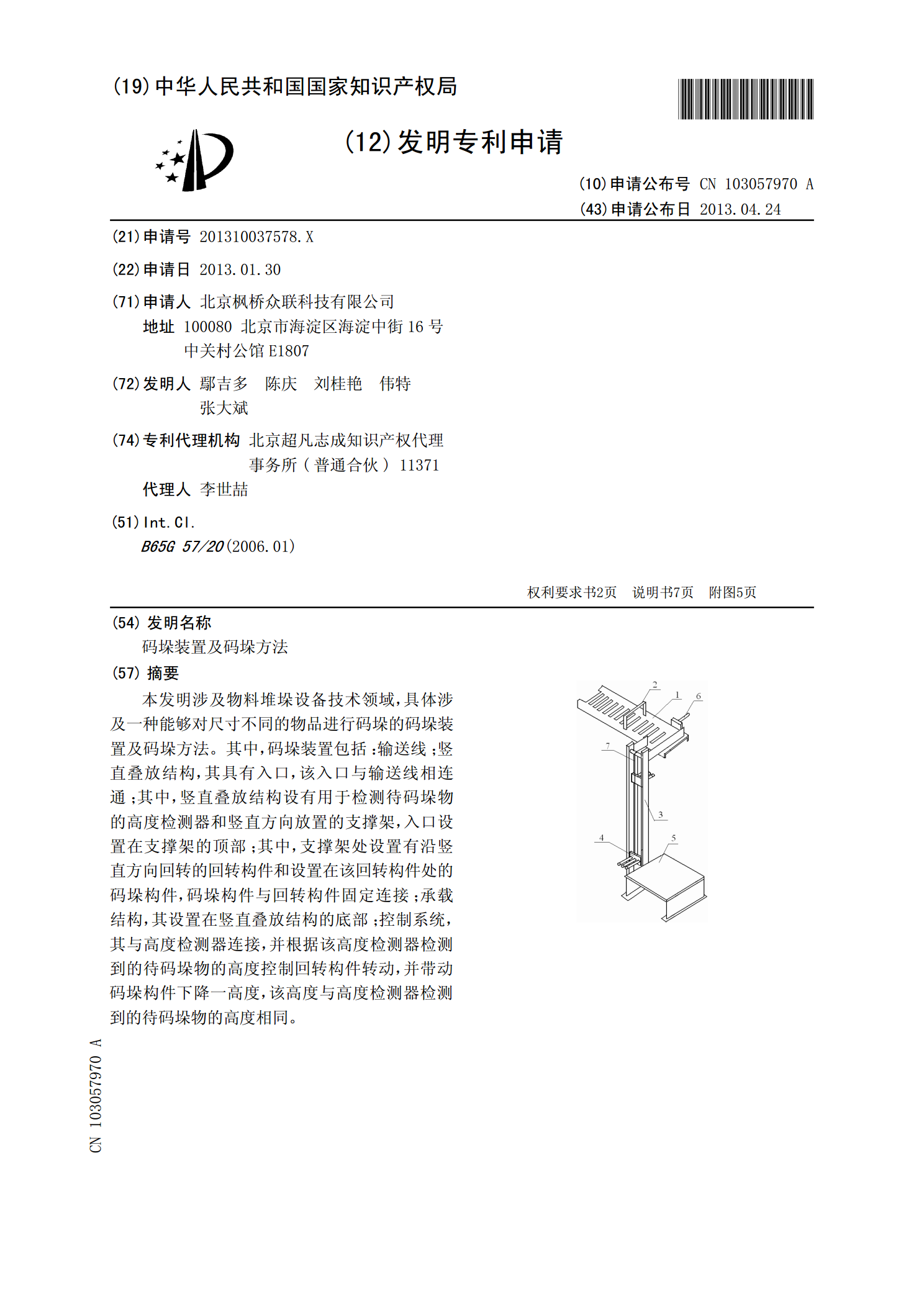
码垛装置及码垛方法.pdf
本发明涉及物料堆垛设备技术领域,具体涉及一种能够对尺寸不同的物品进行码垛的码垛装置及码垛方法。其中,码垛装置包括:输送线;竖直叠放结构,其具有入口,该入口与输送线相连通;其中,竖直叠放结构设有用于检测待码垛物的高度检测器和竖直方向放置的支撑架,入口设置在支撑架的顶部;其中,支撑架处设置有沿竖直方向回转的回转构件和设置在该回转构件处的码垛构件,码垛构件与回转构件固定连接;承载结构,其设置在竖直叠放结构的底部;控制系统,其与高度检测器连接,并根据该高度检测器检测到的待码垛物的高度控制回转构件转动,并带动码垛构