
基于遗传算法的机器人路径规划.pdf

雨巷****珺琦


1/7
2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于遗传算法的机器人路径规划.pdf
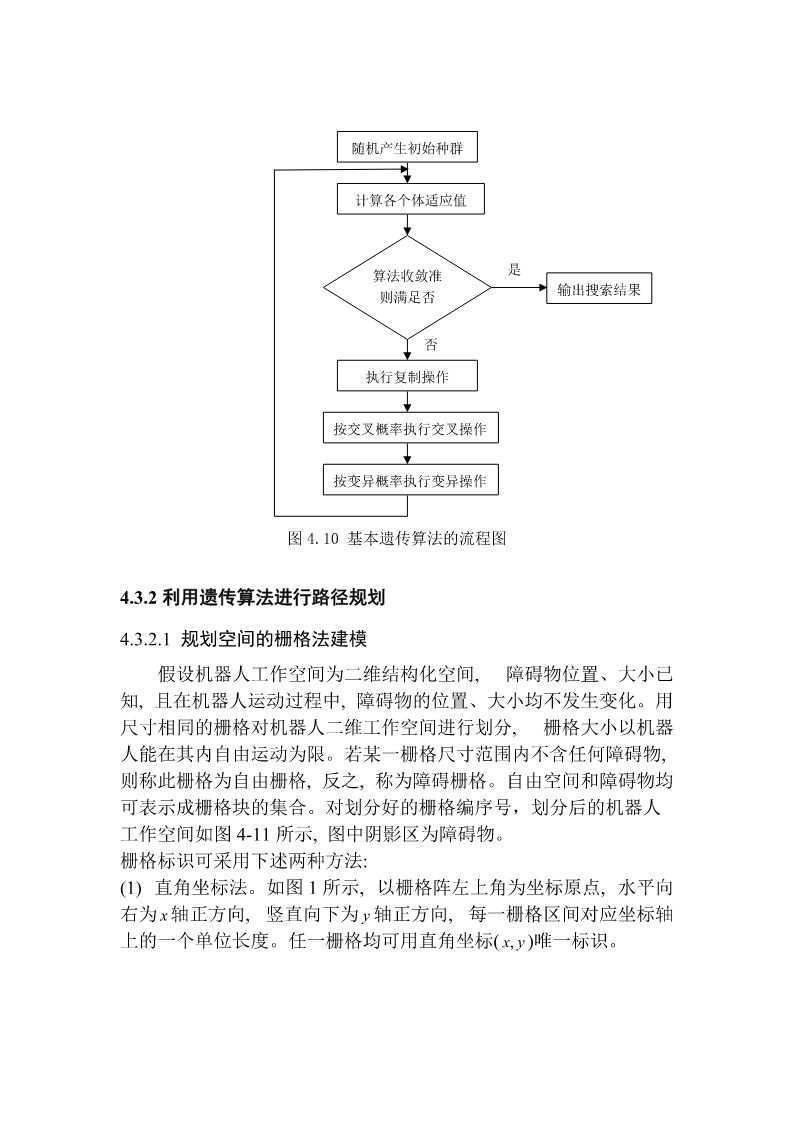
4.3基于遗传算法的机器人路径规划4.3.1遗传算法简介[50][51]在1975年前后,美国Michigan大学JohnHHolland教授根据达尔文的适者生存的进化理论研究出一种人工智能的方法——遗传算法,这种算法以生物进化、遗传原理来设计算法的原理,在算法里面还添加了统计理论学随机过程等数学方法,最终形成了该算法一种独特的理论。遗传算法在求解时,先从一个初始群体的变量开始,依次求解出最佳解,最后得出满足预设的算法要求的迭代次数为最后结果。这种算法是迭代算法的一种。遗传算法是模拟大自然中生物生存的理念

基于遗传算法的机器人路径规划.doc
4.3基于遗传算法的机器人路径规划4.3.1遗传算法简介[50][51]在1975年前后美国Michigan大学JohnHHolland教授根据达尔文的适者生存的进化理论研究出一种人工智能的方法——遗传算法这种算法以生物进化、遗传原理来设计算法的原理在算法里面还添加了统计理论学随机过程等数学方法最终形成了该算法一种独特的理论。遗传算法在求解时先从一个初始群体的变量开始依次求解出最佳解最后得出满足预设的算法要求的迭代次数为最后结果。这种算法是迭代算法的一种。遗传算法是模拟大自然中生物生存的理念而产
基于遗传算法的机器人路径规划.doc
4.3基于遗传算法的机器人路径规划4.3.1遗传算法简介[50][51]在1975年前后美国Michigan大学JohnHHolland教授根据达尔文的适者生存的进化理论研究出一种人工智能的方法——遗传算法这种算法以生物进化、遗传原理来设计算法的原理在算法里面还添加了统计理论学随机过程等数学方法最终形成了该算法一种独特的理论。遗传算法在求解时先从一个初始群体的变量开始依次求解出最佳解最后得出满足预设的算法要求的迭代次数为最后结果。这种算法是迭代算法的一种。遗传算法是模拟大自然中生物生存的理念而产
基于遗传算法的机器人路径规划.doc
4.3基于遗传算法的机器人路径规划4.3.1遗传算法简介[50][51]在1975年前后美国Michigan大学JohnHHolland教授根据达尔文的适者生存的进化理论研究出一种人工智能的方法——遗传算法这种算法以生物进化、遗传原理来设计算法的原理在算法里面还添加了统计理论学随机过程等数学方法最终形成了该算法一种独特的理论。遗传算法在求解时先从一个初始群体的变量开始依次求解出最佳解最后得出满足预设的算法要求的迭代次数为最后结果。这种算法是迭代算法的一种。遗传算法是模拟大自然中生物生存的理念而产
基于遗传算法的机器人路径规划MATLAB源码.doc
基于遗传算法的机器人路径规划MATLAB源码算法的思路如下:取各障碍物顶点连线的中点为路径点相互连接各路径点将机器人移动的起点和终点限制在各路径点上利用Dijkstra算法来求网络图的最短路径找到从起点P1到终点Pn的最短路径由于上述算法使用了连接线中点的条件不是整个规划空间的最优路径然后利用遗传算法对找到的最短路径各个路径点Pi(i=12…n)调整让各路径点在相应障碍物端点连线上滑动利用Pi=Pi1+ti×(Pi2-Pi1)(ti∈[01]i=12…n)即可确定相应的Pi即为新的路径点连接此路径点