
一种船艇靠泊装置及船舰靠泊方法.pdf

是雁****找我

1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种船艇靠泊装置及船舰靠泊方法.pdf
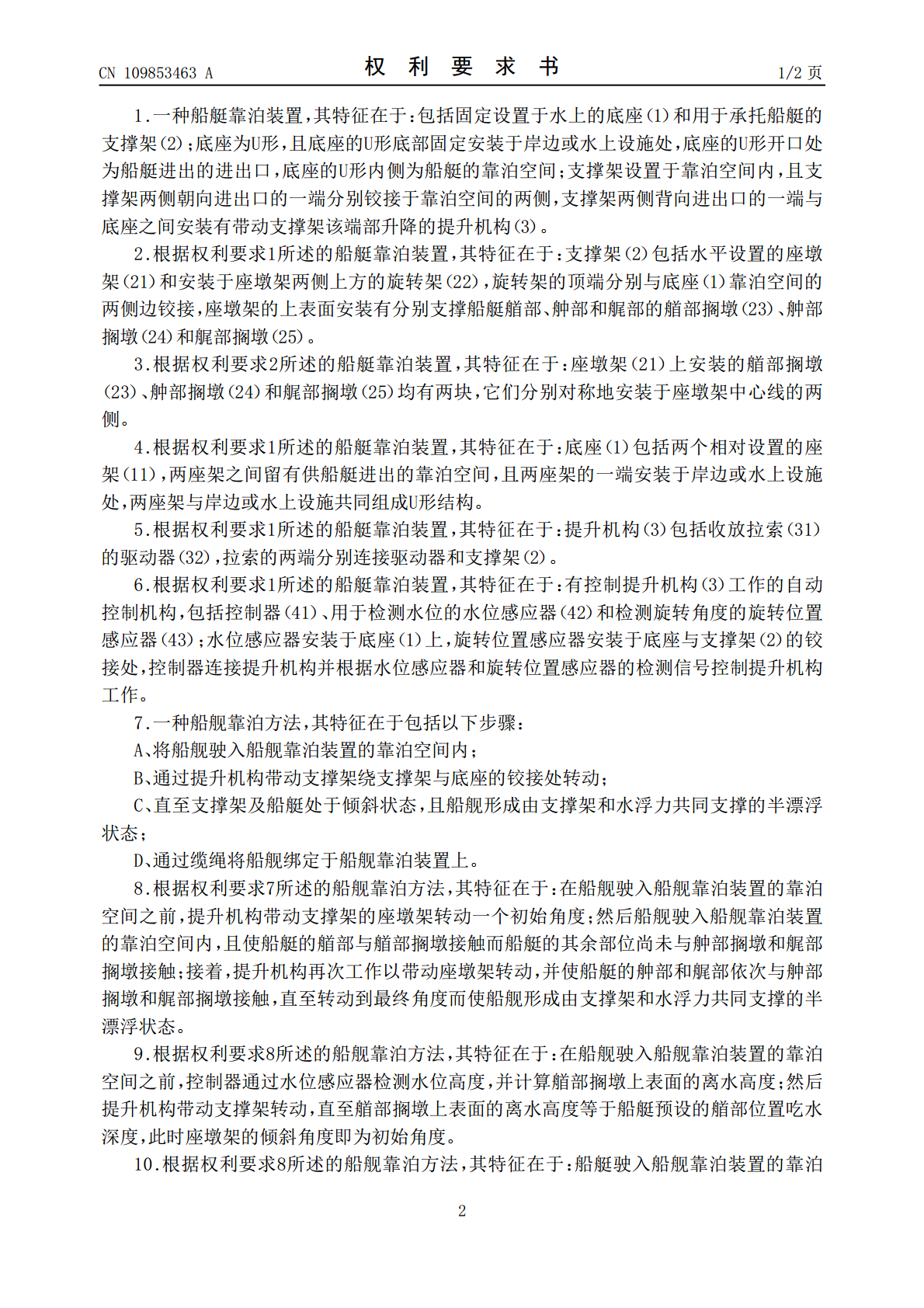
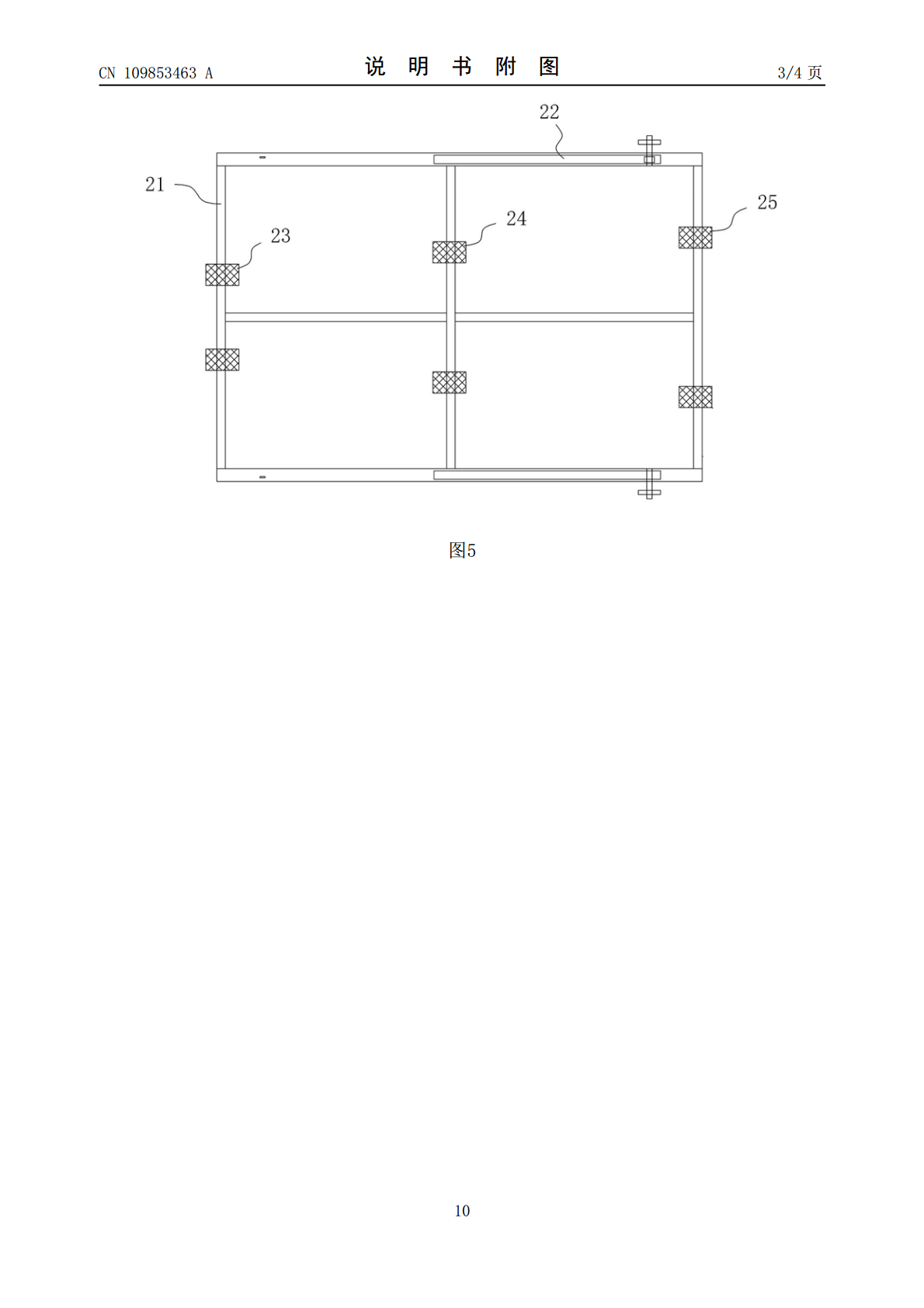
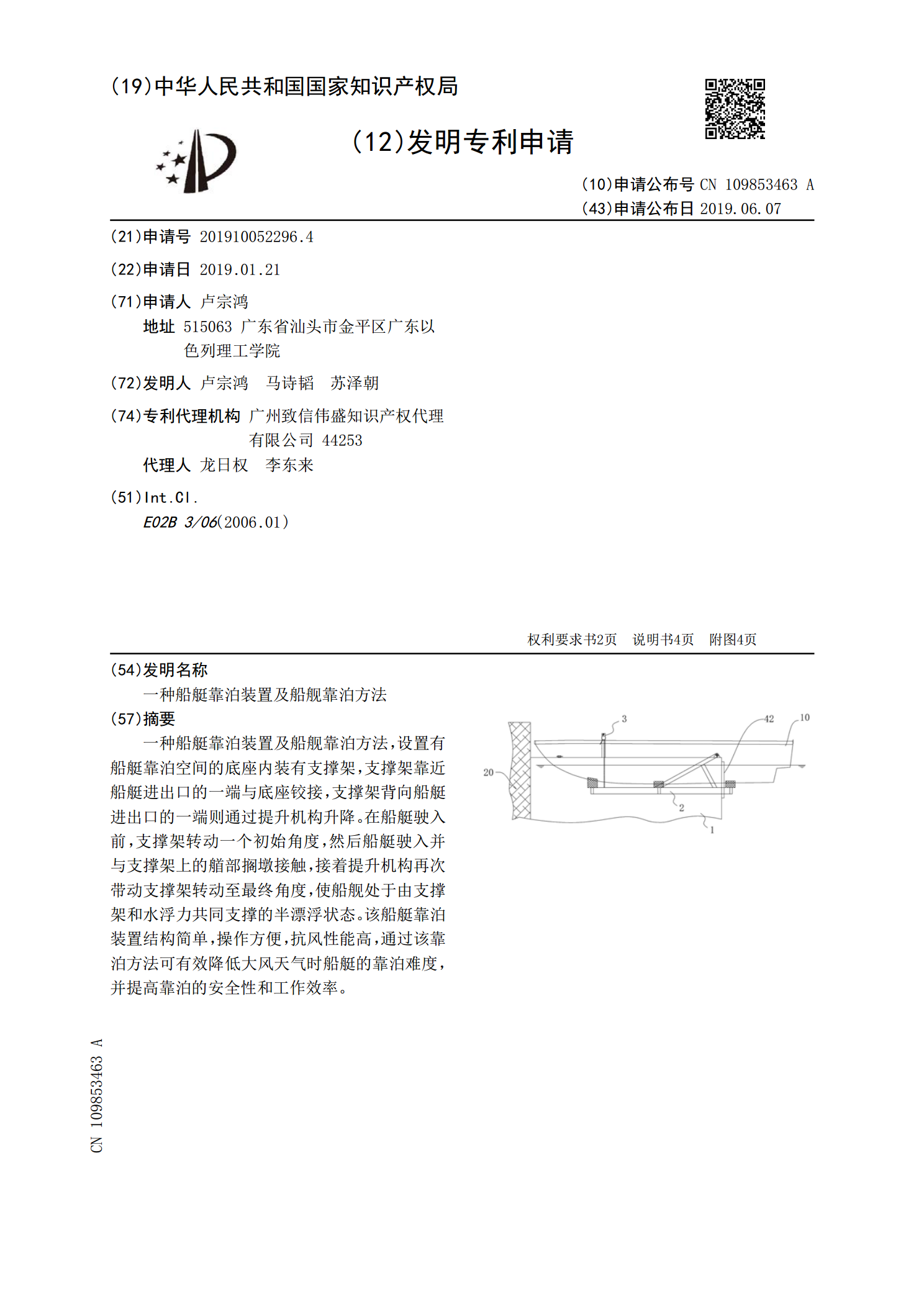
一种船艇靠泊装置及船舰靠泊方法,设置有船艇靠泊空间的底座内装有支撑架,支撑架靠近船艇进出口的一端与底座铰接,支撑架背向船艇进出口的一端则通过提升机构升降。在船艇驶入前,支撑架转动一个初始角度,然后船艇驶入并与支撑架上的艏部搁墩接触,接着提升机构再次带动支撑架转动至最终角度,使船舰处于由支撑架和水浮力共同支撑的半漂浮状态。该船艇靠泊装置结构简单,操作方便,抗风性能高,通过该靠泊方法可有效降低大风天气时船艇的靠泊难度,并提高靠泊的安全性和工作效率。
一种港口靠泊装置.pdf
本发明涉及船舶靠泊装置技术领域,具体涉及一种港口靠泊装置。具体技术方案为:一种港口靠泊装置,包括码头,码头的侧壁上设置有若干个向内凹陷的停靠位,停靠位凹陷处的内部设置有空腔,停靠位凹陷处竖直设置有限位孔,限位孔与空腔相通,空腔内、位于限位孔的两侧对称设置有呈“匚”型支撑架,两个支撑架上、位于限位孔的上方横向设置有与锁定机构相结合的限位柱,停靠位凹陷处的外壁上、位于限位孔的两侧设置有启动限位柱下落的辅助抗震机构,位于限位柱的下方、空腔的内壁上对称设置有使限位柱复位的第一伸缩组件。本发明解决了现有技术中无法对

一种船舶离靠泊装置.pdf
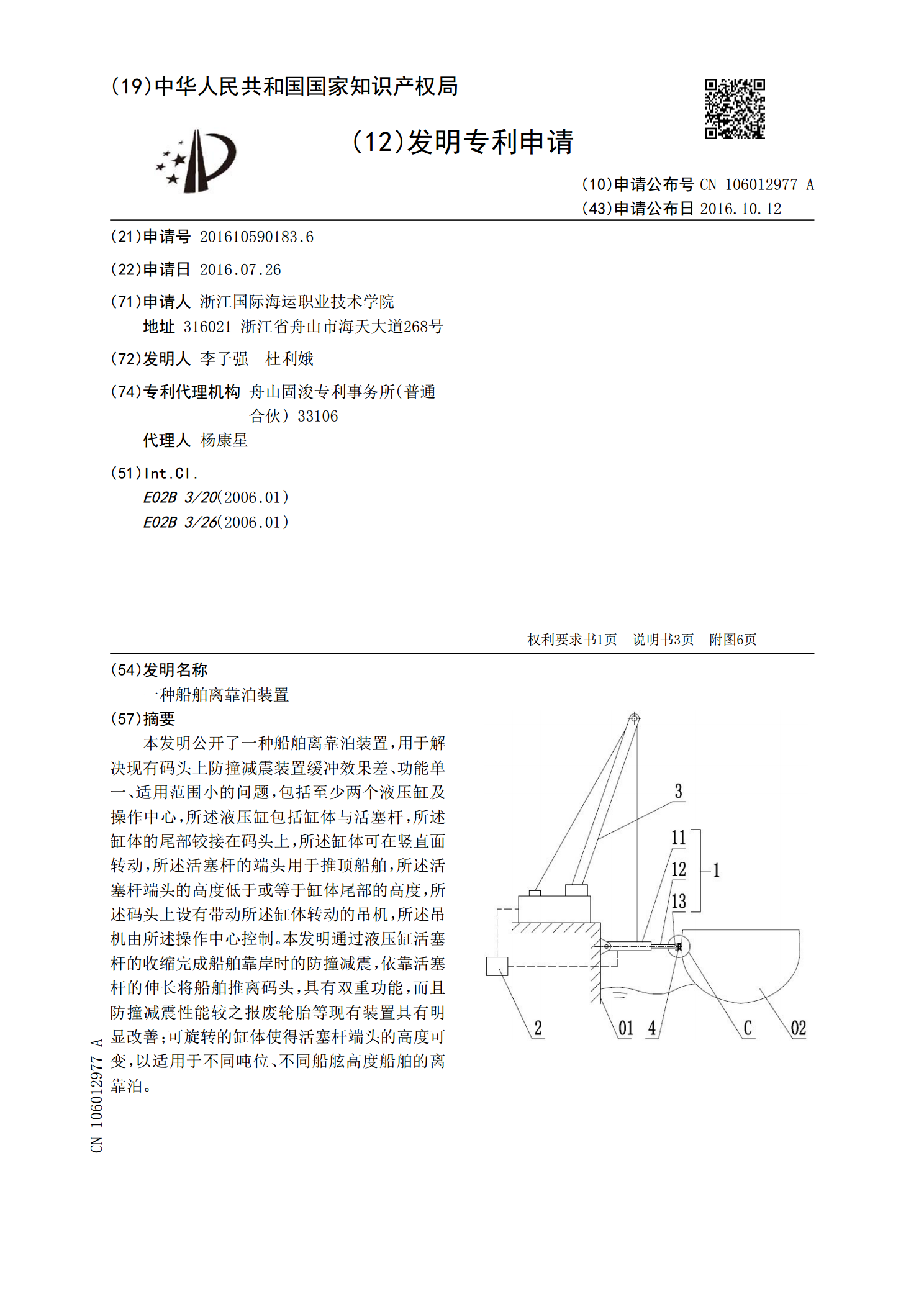
本发明公开了一种船舶离靠泊装置,用于解决现有码头上防撞减震装置缓冲效果差、功能单一、适用范围小的问题,包括至少两个液压缸及操作中心,所述液压缸包括缸体与活塞杆,所述缸体的尾部铰接在码头上,所述缸体可在竖直面转动,所述活塞杆的端头用于推顶船舶,所述活塞杆端头的高度低于或等于缸体尾部的高度,所述码头上设有带动所述缸体转动的吊机,所述吊机由所述操作中心控制。本发明通过液压缸活塞杆的收缩完成船舶靠岸时的防撞减震,依靠活塞杆的伸长将船舶推离码头,具有双重功能,而且防撞减震性能较之报废轮胎等现有装置具有明显改善;可旋
一种船舶离靠泊装置.pdf
本发明公开了一种船舶离靠泊装置,用于解决现有码头上防撞减震装置缓冲效果差、功能单一、适用范围小的问题,包括至少两个液压缸及操作中心,所述液压缸包括缸体与活塞杆,所述缸体的尾部铰接在码头上,所述缸体可在竖直面转动,所述活塞杆的端头用于推顶船舶,所述活塞杆端头的高度低于或等于缸体尾部的高度,所述码头上设有带动所述缸体转动的吊机,所述吊机由所述操作中心控制。本发明通过液压缸活塞杆的收缩完成船舶靠岸时的防撞减震,依靠活塞杆的伸长将船舶推离码头,具有双重功能,而且防撞减震性能较之报废轮胎等现有装置具有明显改善;可旋

船舶靠泊系统.pdf
本发明提供一种船舶靠泊系统。其包括:承载支座,固定设置在船舶上;安装座,与承载支座连接;连接件,与安装座连接;与连接件配合作用实现靠泊的俘获部,固定设置在靠泊对象上;以及,调节部,包括竖向调节部,竖向调节部设置在承载支座上,且与安装座驱动连接;竖向调节部用于驱动安装座沿承载支座竖向移动,以及在靠泊时对安装座施加阻止竖向移动的第一阻力。该船舶靠泊系统系留稳定。