
一种涡旋电磁波雷达旋转目标特征提取与成像方法.pdf

瀚玥****魔王

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种涡旋电磁波雷达旋转目标特征提取与成像方法.pdf
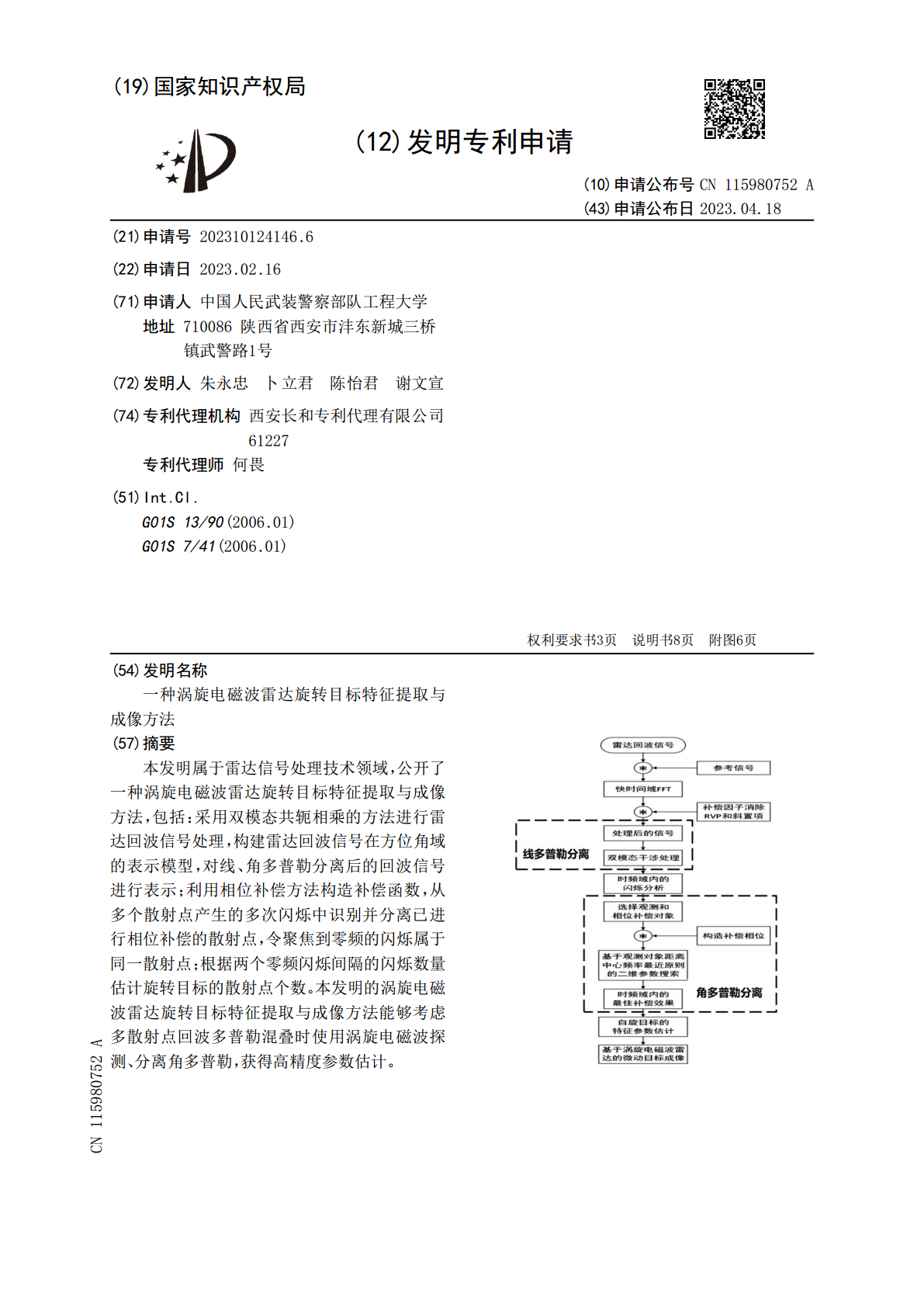
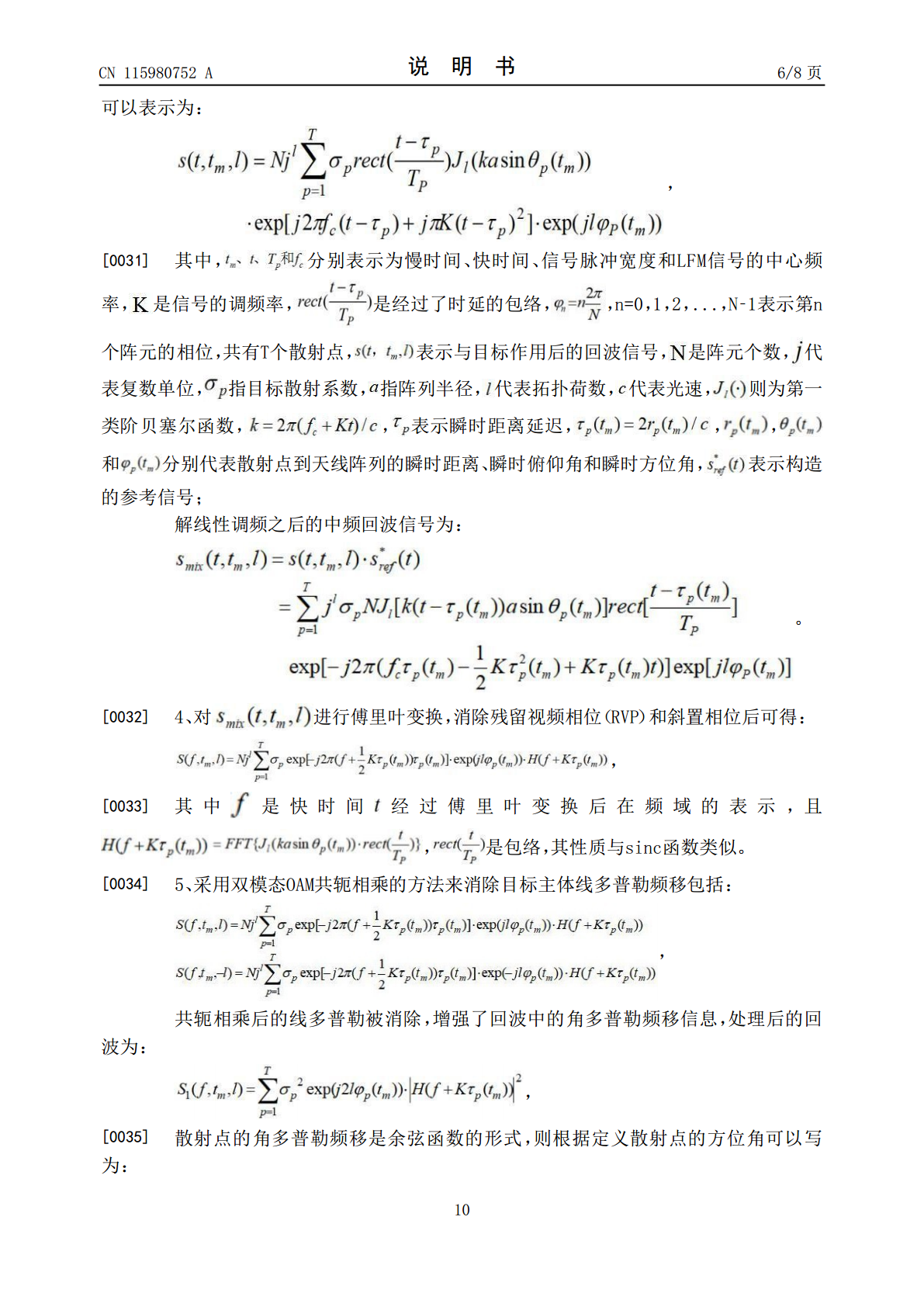
本发明属于雷达信号处理技术领域,公开了一种涡旋电磁波雷达旋转目标特征提取与成像方法,包括:采用双模态共轭相乘的方法进行雷达回波信号处理,构建雷达回波信号在方位角域的表示模型,对线、角多普勒分离后的回波信号进行表示;利用相位补偿方法构造补偿函数,从多个散射点产生的多次闪烁中识别并分离已进行相位补偿的散射点,令聚焦到零频的闪烁属于同一散射点;根据两个零频闪烁间隔的闪烁数量估计旋转目标的散射点个数。本发明的涡旋电磁波雷达旋转目标特征提取与成像方法能够考虑多散射点回波多普勒混叠时使用涡旋电磁波探测、分离角多普勒,
一种基于涡旋电磁波雷达的人体目标步态精细识别方法.pdf
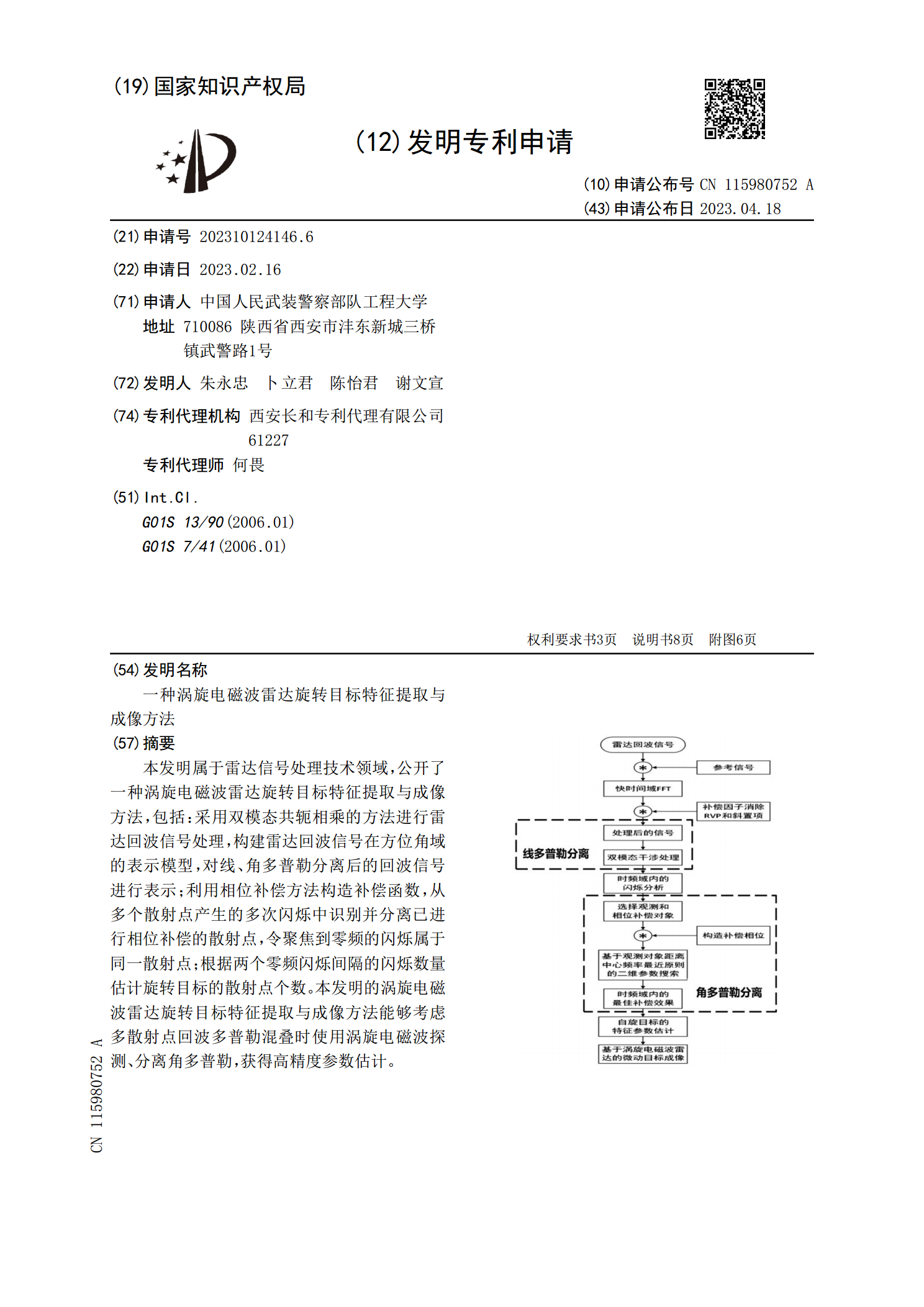
本发明提供一种基于涡旋电磁波雷达的人体目标步态精细识别方法。包括:第一步,对双模态回波信号经过平动补偿,进行解线频调处理,进行一维距离成像,利用双模态的回波将线多普勒和角多普勒分离;第二步,将线多普勒和角多普勒用时频图表示,并输入到双通道的卷积神经网络模型中,获得分类识别结果。实现了对人体目标步态的精细识别,有效克服了传统电磁波无法对人体目标步态的精细识别问题。
一种基于涡旋电磁波的快速超分辨成像方法.pdf
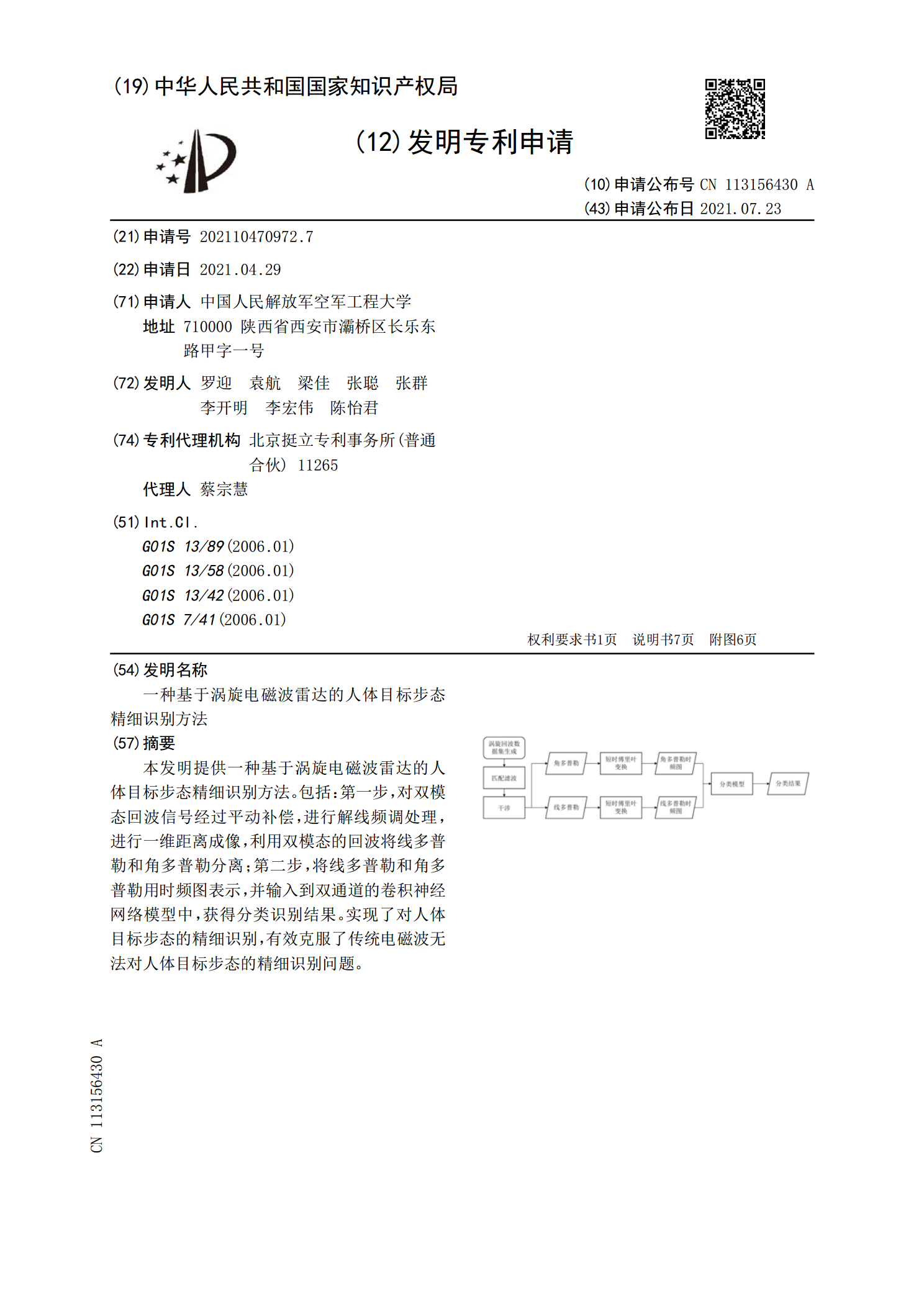
本发明一种基于涡旋电磁波的快速超分辨成像方法,采用均匀圆环阵列结合多信号分类方法,构建了回波信号方位角与俯仰角的二维成像模型,实现了球坐标下的目标二维成像,同时针对MUSIC算法需目标个数已知及二维空域搜索较慢的问题,提出了实值最小模算法(RV‑MNM),可在信源个数未知的情况下,实现对目标的二维成像,并在实值化计算下运算效率提高约为30%。

一种基于多通道雷达的旋转目标微动特征提取方法和装置.pdf
本申请涉及一种基于多通道雷达的旋转目标微动特征提取方法和装置。所述方法包括:获取多通道雷达在测量旋转目标时多个相邻通道接收的回波数据,对回波数据进行干涉处理得到对应的干涉数据。通过时频分析得到干涉数据的微多普勒曲线,对微多普勒曲线对应的速度曲线进行积分,得到对应的距离差数据。根据多通道雷达和旋转目标的位置关系以及得到的距离差数据,得到旋转目标在相邻通道对应的基线方向的微动特征。上述方法利用多通道雷达的多视角特性,基于干涉处理与时频分析相结合的方法提取旋转目标的微动特征,避免了从干涉回波数据中提取干涉相位和

一种SAR雷达运动目标成像方法.pdf
本发明属于雷达信号处理领域,公开了一种SAR雷达运动目标成像方法,包括:获取SAR雷达接收到的回波数据,对回波数据进行距离向压缩,将距离压缩后的回波数据通过低通滤波器,分离出距离压缩后的回波数据中的杂波数据和可检测数据;将杂波数据形成地面场景图;对可检测数据进行目标运动参数的估计,得到多普勒中心频率估计值和多普勒调频斜率估计值,根据多普勒中心频率估计值和多普勒调频斜率估计值构造参考函数;并将参考函数和可检测数据进行时域相乘或者频域卷积,从而得到运动目标成像图;将地面场景图和运动目标成像图相加,得到SAR雷