
一种融合激光雷达与深度相机的桥梁模型生成方法及装置.pdf

慧娇****文章

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种融合激光雷达与深度相机的桥梁模型生成方法及装置.pdf
本发明涉及土木工程计算机视觉技术领域,特别是指一种融合激光雷达与深度相机的桥梁模型生成方法及装置,一种融合激光雷达与深度相机的桥梁模型生成方法包括:激光雷达和深度相机进行联合标定,获得联合标定参数;将合成点云数据和真实点云数据输入预设的半自动标注算法,获得桥梁语义数据集;根据预设的桥梁数据集、桥梁语义数据集和预设的二维深度学习算法,获得桥梁三维语义模型;根据联合标定参数和所述桥梁三维语义模型,获得重建后桥梁三维语义模型;根据重建后桥梁三维语义模型,通过预设的二次开发程序进行编译,获得桥梁信息模型。本发明是
融合激光雷达和双目相机的深度估计方法、装置及设备.pdf
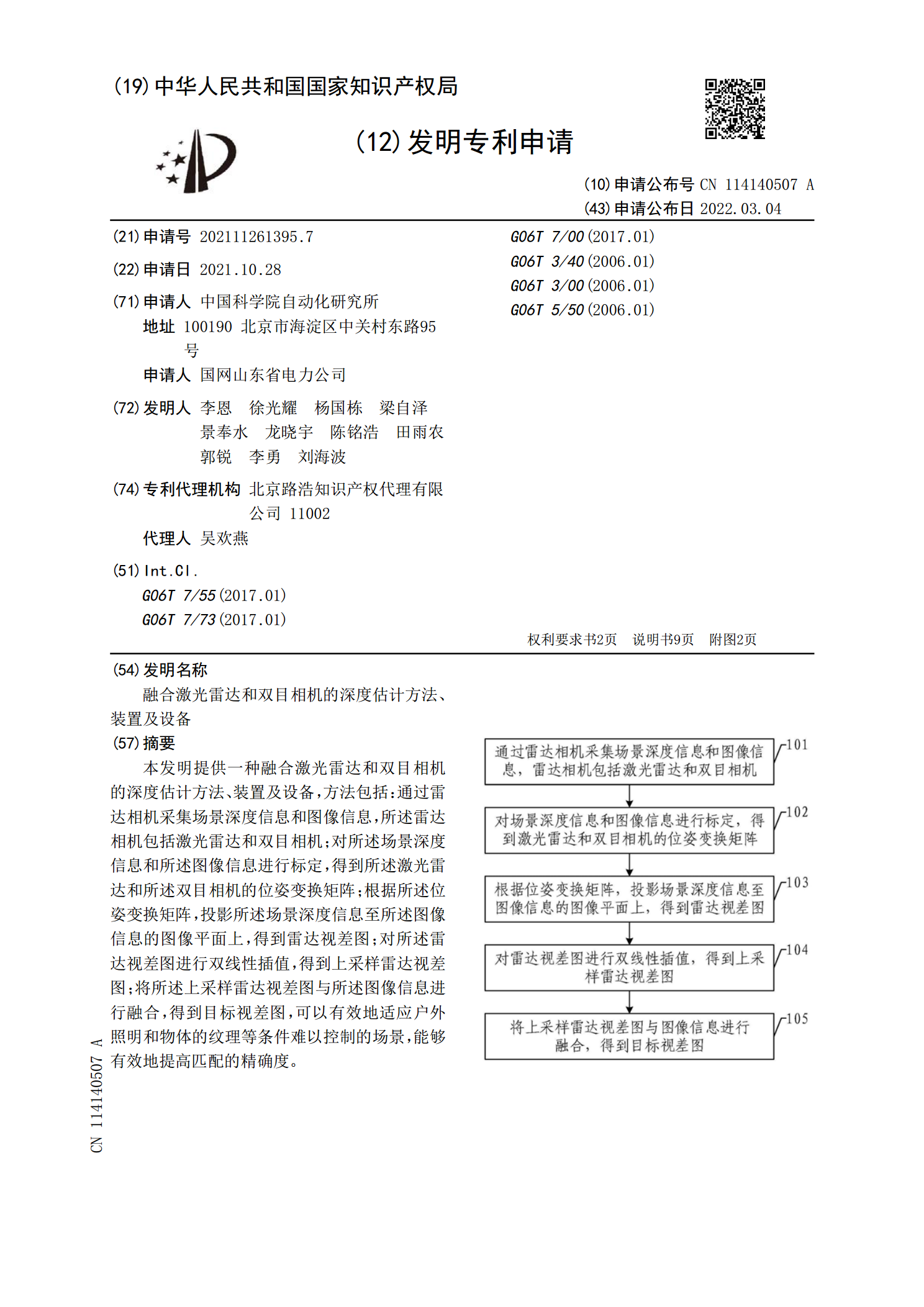
本发明提供一种融合激光雷达和双目相机的深度估计方法、装置及设备,方法包括:通过雷达相机采集场景深度信息和图像信息,所述雷达相机包括激光雷达和双目相机;对所述场景深度信息和所述图像信息进行标定,得到所述激光雷达和所述双目相机的位姿变换矩阵;根据所述位姿变换矩阵,投影所述场景深度信息至所述图像信息的图像平面上,得到雷达视差图;对所述雷达视差图进行双线性插值,得到上采样雷达视差图;将所述上采样雷达视差图与所述图像信息进行融合,得到目标视差图,可以有效地适应户外照明和物体的纹理等条件难以控制的场景,能够有效地提高
深度视觉相机与激光雷达融合的导航方法、系统及设备.pdf
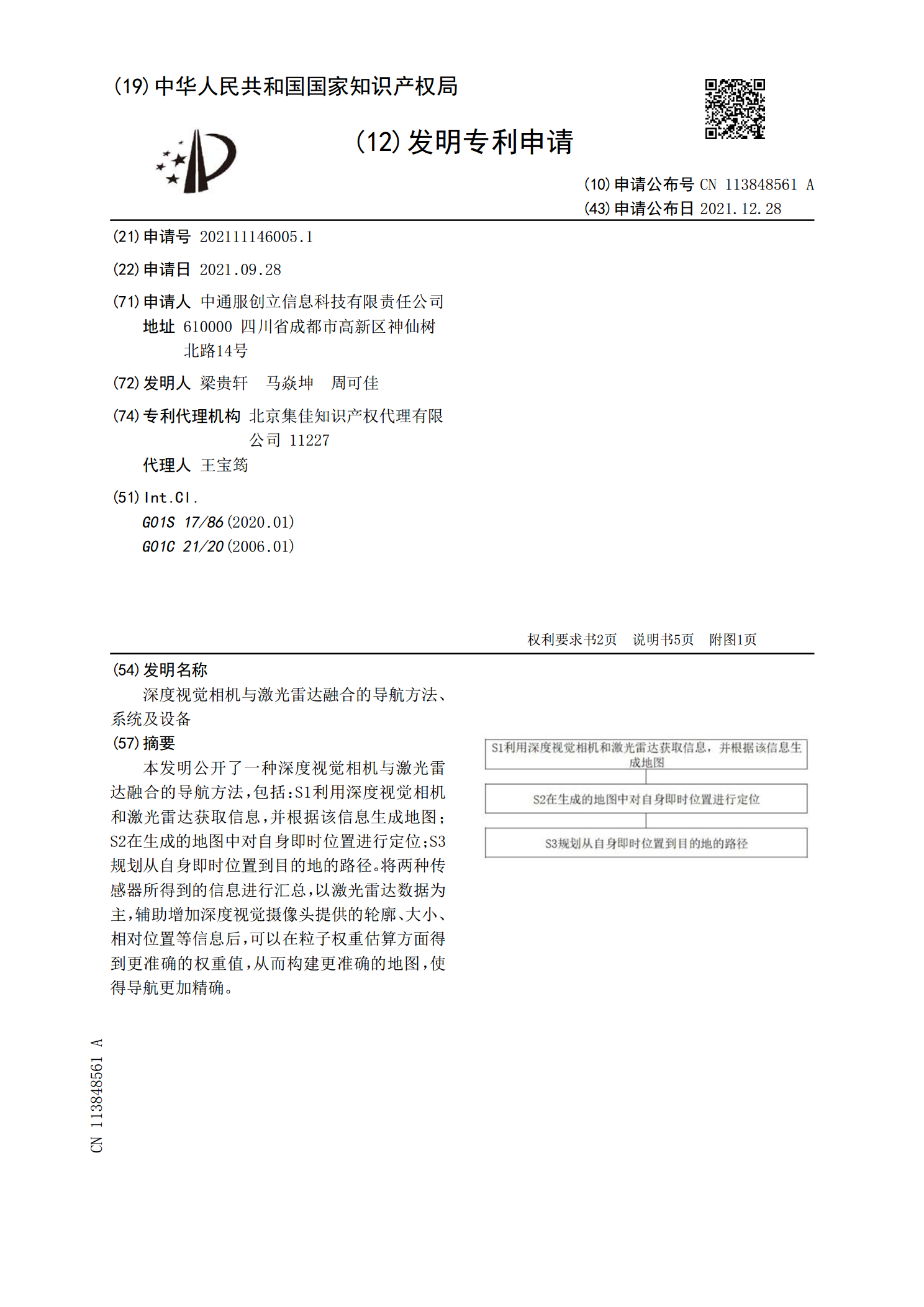
本发明公开了一种深度视觉相机与激光雷达融合的导航方法,包括:S1利用深度视觉相机和激光雷达获取信息,并根据该信息生成地图;S2在生成的地图中对自身即时位置进行定位;S3规划从自身即时位置到目的地的路径。将两种传感器所得到的信息进行汇总,以激光雷达数据为主,辅助增加深度视觉摄像头提供的轮廓、大小、相对位置等信息后,可以在粒子权重估算方面得到更准确的权重值,从而构建更准确的地图,使得导航更加精确。
一种深度视觉相机与激光雷达融合导航的机器人.pdf
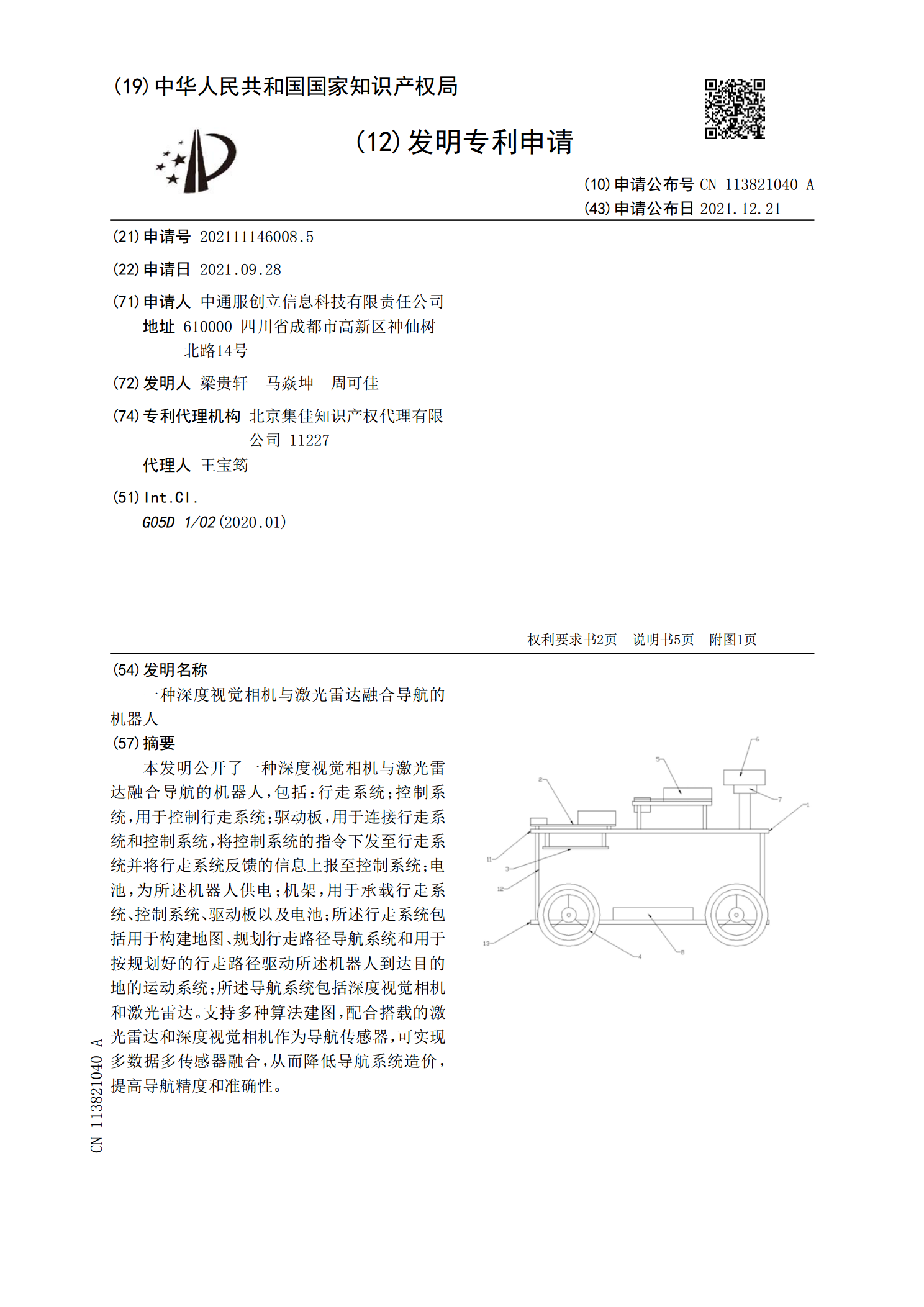
本发明公开了一种深度视觉相机与激光雷达融合导航的机器人,包括:行走系统;控制系统,用于控制行走系统;驱动板,用于连接行走系统和控制系统,将控制系统的指令下发至行走系统并将行走系统反馈的信息上报至控制系统;电池,为所述机器人供电;机架,用于承载行走系统、控制系统、驱动板以及电池;所述行走系统包括用于构建地图、规划行走路径导航系统和用于按规划好的行走路径驱动所述机器人到达目的地的运动系统;所述导航系统包括深度视觉相机和激光雷达。支持多种算法建图,配合搭载的激光雷达和深度视觉相机作为导航传感器,可实现多数据多传

一种激光雷达和相机融合测距方法及系统.pdf
本发明公开了一种激光雷达和相机融合测距方法,包括:获取待测目标的激光雷达数据和相机数据;将待测目标分离为单激光雷达目标、单相机目标和激光雷达相机融合目标;基于激光雷达数据,获取地面的三维点云数据,获取地面特征点信息,生成地面的虚拟点云,对地面的虚拟点云进行线性插值,得到完整的路面信息,将路面信息投影到相机图像上,根据目标像素值与路面点云像素值,计算得到各单相机目标的距离值;合并单相机目标的距离值、单激光雷达目标的距离值、激光雷达相机融合目标的距离值。本发明能够解决无人矿卡障碍物检测中对小型障碍物检测距离不