
一种遥感影像场景分类方法.pdf

是你****盟主

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
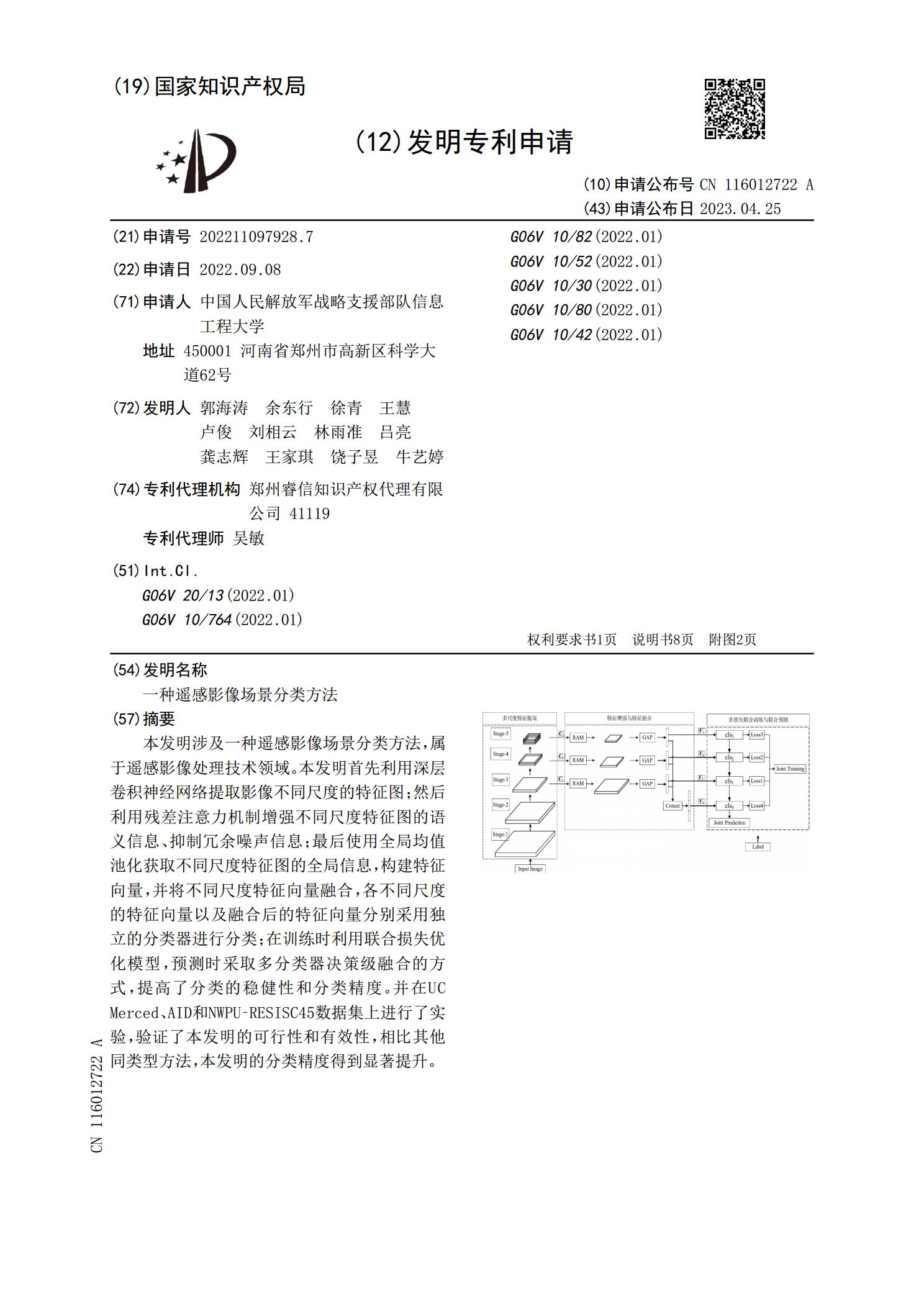
一种遥感影像场景分类方法.pdf
本发明涉及一种遥感影像场景分类方法,属于遥感影像处理技术领域。本发明首先利用深层卷积神经网络提取影像不同尺度的特征图;然后利用残差注意力机制增强不同尺度特征图的语义信息、抑制冗余噪声信息;最后使用全局均值池化获取不同尺度特征图的全局信息,构建特征向量,并将不同尺度特征向量融合,各不同尺度的特征向量以及融合后的特征向量分别采用独立的分类器进行分类;在训练时利用联合损失优化模型,预测时采取多分类器决策级融合的方式,提高了分类的稳健性和分类精度。并在UCMerced、AID和NWPU‑RESISC45数据集上

基于场景的遥感影像镶嵌方法.pdf
本发明提供一种基于场景的遥感影像镶嵌方法,首先获取目标场景和第一影像,并对第一影像进行特征提取得到第一影像的特征,构建目标场景和第一影像的特征之间的关系图谱;然后利用关系图谱对第一影像进行推荐,得到推荐影像;之后采用筛选策略对推荐影像进行迭代筛选,得到第二影像;最后对第二影像进行两两镶嵌,得到镶嵌影像。本发明的方法先对遥感影像进行推荐和迭代筛选,得到影像后再进行镶嵌,极大的降低了人工成本,并且推荐和筛选后得到的影像更适用于当前目标场景,更适合进行场景任务及场景分析。

遥感影像分类方法研究.docx
遥感影像分类方法研究陈平王炬城[摘要]随着遥感影像分辨率的不断提高,人们从影像上获得更多有效的信息。然而在图像处理分析过程中都离不开对类别的划分,参照地物类型,便可以从图像上对地物分类。影像的分类是通过计算机将影像像素进行数值化,达到自动识别地物将其归类,但不同的方法有其不同优缺点,分类效果也受很多因素的影响。本文将对常用的几种分类方法进去对比分析。[关键词]遥感图像分类最大似然面向对象决策树分类精度评价[中图分类号]P217[文献码]B[文章编号]1000-405X(2015)-9-164-10引言在当

遥感影像分类方法研究.docx
遥感影像分类方法研究[摘要]随着遥感影像分辨率的不断提高人们从影像上获得更多有效的信息。然而在图像处理分析过程中都离不开对类别的划分参照地物类型便可以从图像上对地物分类。影像的分类是通过计算机将影像像素进行数值化达到自动识别地物将其归类但不同的方法有其不同优缺点分类效果也受很多因素的影响。本文将对常用的几种分类方法进去对比分析。[关键词]遥感图像分类最大似然面向对象决策树分类精度评价[中图分类号]P217[文献码]B[文章编号]1000-
遥感影像分类方法研究.docx
遥感影像分类方法研究[摘要]随着遥感影像分辨率的不断提高人们从影像上获得更多有效的信息。然而在图像处理分析过程中都离不开对类别的划分参照地物类型便可以从图像上对地物分类。影像的分类是通过计算机将影像像素进行数值化达到自动识别地物将其归类但不同的方法有其不同优缺点分类效果也受很多因素的影响。本文将对常用的几种分类方法进去对比分析。[关键词]遥感图像分类最大似然面向对象决策树分类精度评价[中图分类号]P217[文献码]B[文章编号]1000-